相机标定篇——相机标定
认为相机标定是三维重建的核心,研究生期间主要方向为结构光三维重建
必要的数学知识
线性方程求解
Gauss消元法;LU分解;Cholesky分解
最小二乘问题-线性方法
特征值分解;奇异值分解;超定线性方程;最小二乘SVD法
最小二乘问题-非线性优化
最速下降;牛顿法;高斯牛顿法;LM优化;
单相机标定
目前相机标定有很多成熟的算法库如Opencv或者matlab工具箱以及Halcon,其中matlab与halcon貌似做的精度会相对高一些,但是实际工程中,上述平台的标定算法的灵活度较低,因此往往是自己开发算法。
相机标定,目的是确定相机的内参矩阵K、外参矩阵R t和 畸变系数 d 。
四大坐标系
世界坐标系->相机坐标系
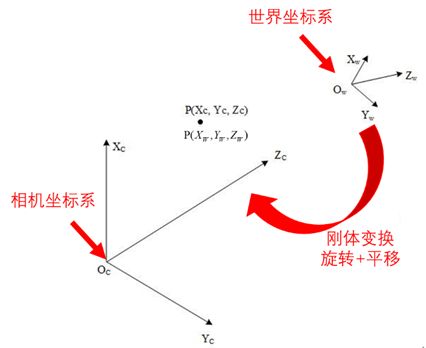
世界坐标系:以外界某个参考点建立的坐标系,单位为 m m mm mm,或者 m m m
相机坐标系:以相机光心建立的坐标系,其 z z z 轴指向相机的正前方。
假设物点在世界坐标系下的坐标为: P = [ X W , Y W , Z W ] P=[X_W,Y_W,Z_W] P=[XW,YW,ZW],那么转换到相机坐标系下坐标: P = [ X C , Y C , Z C ] T P=[X_C,Y_C,Z_C]^T P=[XC,YC,ZC]T 的变换如下

相机坐标系->图像坐标系
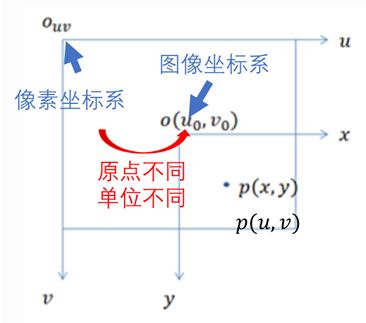
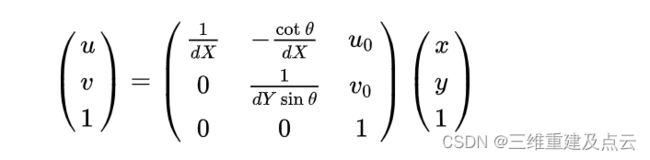
我们用 u , v u,v u,v 来记像素的列数与行数,那么:
- 图像坐标系下的坐标系原点,在像素坐标系 u − v u-v u−v 下记为: o ( u 0 , v 0 ) o(u_0,v_0) o(u0,v0)
- 像点 p p p,在 u − v u-v u−v 坐标系下记为: p ( u , v ) p(u,v) p(u,v)
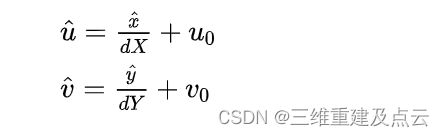
此外,再分别记 d x , d y dx,dy dx,dy 为每个像素在 x x x 轴、 y y y 轴所代表的物理尺寸大小,可推导出下式
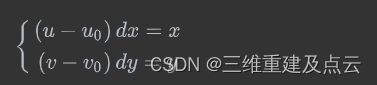
将上式写成齐次的形式有
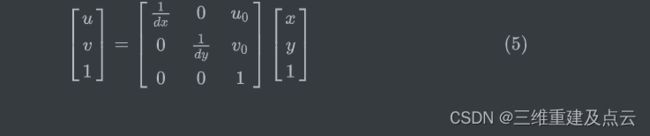
汇总
四大坐标系转换关系

张正友标定法
张正友标定法利用如下图所示的棋盘格标定板,在得到一张标定板的图像之后,可以利用相应的图像检测算法得到每一个角点的像素坐标 (u,v)。
张正友标定法将世界坐标系固定于棋盘格上,则棋盘格上任一点的物理坐标 W=0,由于标定板的世界坐标系是人为事先定义好的,标定板上每一个格子的大小是已知的,我们可以计算得到每一个角点在世界坐标系下的物理坐标(U,V,W=0)。
我们将利用这些信息:每一个角点的像素坐标 (u,v) 、每一个角点在世界坐标系下的物理坐标(U,V,W=0),来进行相机的标定,获得相机的内外参矩阵、畸变参数。

标定相机的内参矩阵和外参矩阵
思路如下:①求解内参矩阵与外参矩阵的积; ②求解内参矩阵; ③求解外参矩阵
求解内参矩阵与外参矩阵的积
将世界坐标系固定于棋盘格上,则棋盘格上任一点的物理坐标 W=0 ,因此,原单点无畸变的成像模型可以化为下式。其中, R1,R2为旋转矩阵 R 的前两列。为了简便,将内参矩阵记为A。

对于不同的图片,内参矩阵A 为定值;对于同一张图片,内参矩阵A,外参矩阵(R1,R2,T)为定值;对于同一张图片上的单点,内参矩阵A,外参矩阵 (R1,R2,T),尺度因子 Z为定值。
我们将 A(R1 R2 T)记为矩阵 H , H 即为内参矩阵和外参矩阵的积,记矩阵 H 的三列为 [H1 H2 H3] ,则有:
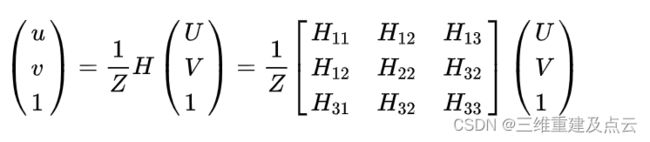
利用上式消去尺度因子Z可得
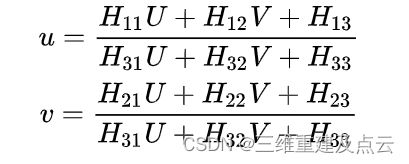
上式对于同一张图片上所有的角点均成立。(u,v)是像素坐标系下的标定板角点的坐标, (UV) 是世界坐标系下的标定板角点的坐标。通过图像识别算法,我们可以得到标定板角点的像素坐标(u,v),又由于标定板的世界坐标系是人为定义好的,标定板上每一个格子的大小是已知的,我们可以计算得到世界坐标系下的(UV) 。
由这里的H 是齐次矩阵,有8个独立未知元素。每一个标定板角点可以提供两个约束方程(u,UV的对应关系、 v,UV的对应关系提供了两个约束方程),因此,当一张图片上的标定板角点数量等于4时,即可求得该图片对应的矩阵H。当一张图片上的标定板角点数量大于4时,利用最小二乘法回归最佳的矩阵 H。
求解内参矩阵
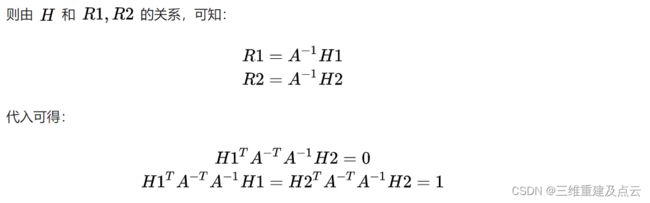
目前已知了H=A(R1 R2 T),下面求解内参A 利用R1R2的单位正交关系

为了简便,记相机内参矩阵A为
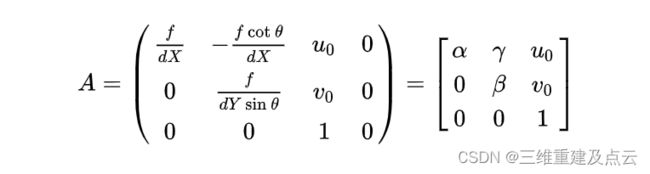
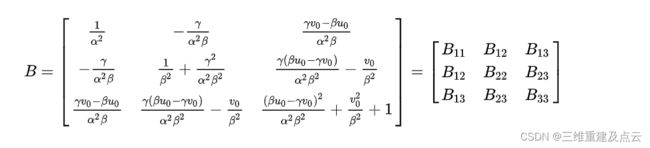
则用矩阵 A表示矩阵B得:
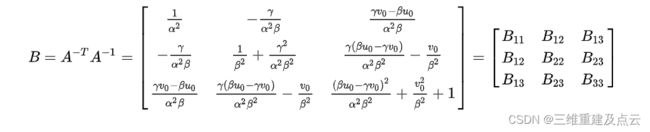
B为对称阵,B12 B13 B23 出现了两次
使用B=A-TA-1,将前面的单位正交约束方程化为

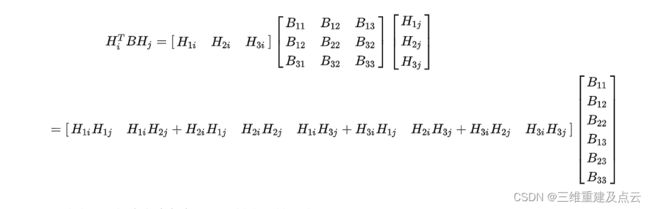
此时,通过 R1,R2单位正交得到的约束方程可化为

写成矩阵的形式

由于矩阵H已知,矩阵v又全部由矩阵H的元素构成,因此矩阵v已知。
此时,我们只要求解出向量 b ,即可得到矩阵 B 。每张标定板图片可以提供一个 vb=0的约束关系,该约束关系含有两个约束方程。但是,向量b有6个未知元素。因此,单张图片提供的两个约束方程是不足以解出来向量b。因此,我们只要取3张标定板照片,得到3个vb=0的约束关系,即6个方程,即可求解向量 b。当标定板图片的个数大于3时(事实上一般需要15到20张标定板图片),可采用最小二乘拟合最佳的向量b,并得到矩阵B
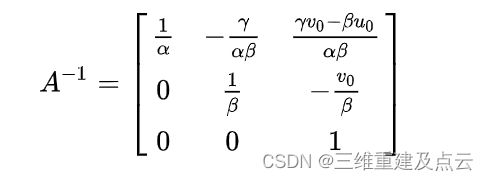
求解外参
上述过程已经求出了H,内参A ,通过公式(R1 R2 T)=A-1H 即可求得每一张图片对应的外参矩阵(R1 R2 T)
此时相机的内参与外参均已得到
畸变参数
张正友标定只考虑了径向畸变
径向畸变公式(2阶)如下:
 分别为理想的无畸变的归一化的图像坐标、畸变后的归一化图像坐标
分别为理想的无畸变的归一化的图像坐标、畸变后的归一化图像坐标
r为图像像素点到图像中心点的距离.
图像坐标和像素坐标的转化关系为:
同理可得畸变后的像素坐标的表达式为
代入径向畸变公式(2阶)则有:


上式中的uv可以通过识别标定板的角点获得,每一个角点可以构造两个上述等式。有m幅图像,每幅图像上有n个标定板角点,则将得到的所有等式组合起来,可以得到个mn未知数为的 k[k1,k2]T 约束方程,将约束方程系数矩阵记为D,等式右端非齐次项记为 d ,可将其记着矩阵形式:

则使用最小二乘法可求得:

LM算法参数优化
从上述推导过程就可以看出,张正友标定法是有很多近似的,所以仅仅利用上述的过程进行标定误差肯定是很大的。所以张正友标定法还利用L-M(Levenberg-Marquardt)算法对参数进行了优化。下一篇博客更新LM算法