OpenCV(3)程序时间测量、色彩映射、LUT、图像反转 C++
1. 如何使用OpenCV扫描图像,查找表格和时间测量
2. (cv::getTickCount) 和 (cv::getTickFrequency)计时函数
double t1 = (double)getTickCount(); //计时开始
... //需要计时的程序
double t2 = (double)getTickCount(); //计时结束
cout<<"time:"<<(t2-t1)/(getTickFrequency())<<endl; //时间输出
例1:
#include执行结果:
R (default) =
[ 91, 2, 79, 179, 52, 205, 236, 8, 181, 239, 26, 248, 207, 218, 45;
183, 158, 101, 102, 18, 118, 68, 210, 139, 198, 207, 211, 181, 162, 197;
191, 196, 40, 7, 243, 230, 45, 6, 48, 173, 242, 125, 175, 90, 63;
90, 22, 112, 221, 167, 224, 113, 208, 123, 214, 35, 229, 6, 143, 138;
98, 81, 118, 187, 167, 140, 218, 178, 23, 43, 133, 154, 150, 76, 101]
运行时间:0.0028112秒
3. (cv :: LUT)函数
在图像处理中,很常见的是要将所有给定的图像值修改为其他值。OpenCV提供了修改图像值的功能,无需编写图像的扫描逻辑。我们使用核心模块的cv :: LUT()函数。首先我们构建一个Mat类型的查找表:
Mat lookUpTable(1, 256, CV_8U);
uchar* p = lookUpTable.ptr();
for( int i = 0; i < 256; ++i)
p[i] = table[i];
最后调用函数(我是我们的输入图像,J是输出的一个):
LUT(I,lookUpTable,J);
1. opencv 2中的LUT函数为
void LUT(InputArray src, InputArray lut, OutputArray dst,int interpolation);
- src表示的是输入图像(可以是单通道也可是3通道)
- lut表示查找表(查找表也可以是单通道,也可以是3通道,如果输入图像为单通道,那查找表必须为单通道,若输入图像为3通道,查找表可以为单通道,也可以为3通道,若为单通道则表示对图像3个通道都应用这个表,若为3通道则分别应用 )
- dst表示输出图像,
- interpolation表示插值,这个参数没有用,源代码里面也没有用它,默认为0就行,传其他值会报错。
2. opencv3里面的LUT函数
void LUT(InputArray src, InputArray lut, OutputArray dst);
和2一样,不过没有了interpolation这个参数。
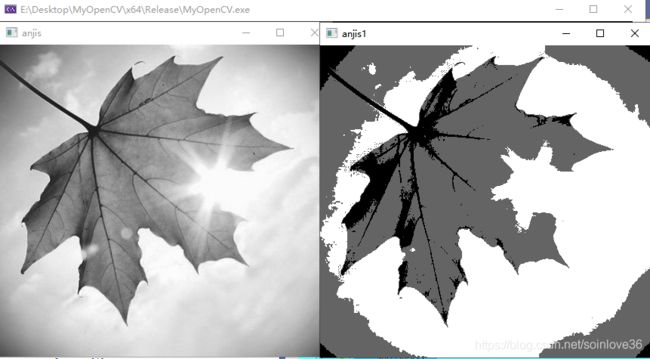
1. 单通道图片处理:
#include执行结果:
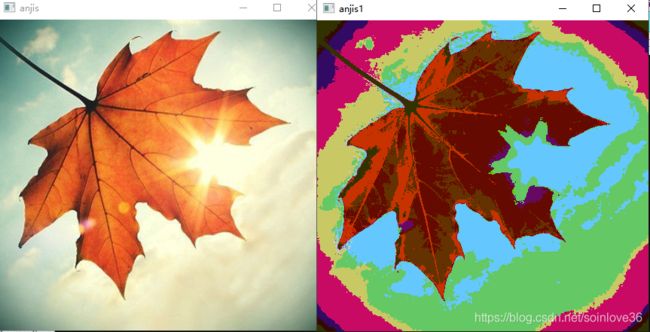
2. 三通道彩色图像源代码:
#include执行结果:
3. 图像像素的读写操作
3.1. 手动遍历实现图像反转
(cv :: invert)是opencv自带的求解逆矩阵或者伪逆矩阵的函数
double invert(InputArray src, OutputArraydst, int flags=DECOMP_LU);
- src: 输入,浮点型(32位或者64位)的M×N的矩阵,当参数3的使用方法为DECOMP_CHOLESKY DECOMP_LU
DECOMP_EIG时函数功能为求逆,此时需保证M=N(参见参数flag) - dst: 输出,与输入矩阵类型一致的N×M的矩阵
- flag:求逆方法,提供4种可选择的方法:DECOMP_CHOLESKY(基于CHOLESKY分解的方法),
DECOMP_LU(基于LU分解的方法), DECOMP_EIG(基于特征值分解的方法),
DECOMP_SVD(基于奇异值分解的方法)。其中,前三种方法要求输入的矩阵必须为方阵,此时计算结果为矩阵的逆;最后一种方法为对非方阵的伪逆计算,对矩阵的形状没有要求。函数接口的默认参数为DECOMP_LU方法
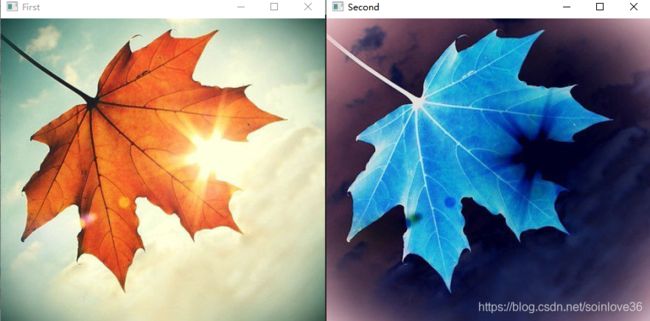
图像取反:反转图像的像素强度,使图像中的前景变为背景,背景变为前景。
显然这是一个一对一的映射,即像素值0变为255,1变为254…254变为1,255变为0。对应的查找表为lookup[256]={255,254,…,1,0}。
#include 3.2. LUT函数实现图像反转
#include执行结果:
3.3.图像像素的读写操作
本次对像素的操作一共使用了6种方法,并进行计时对比,最终Opencv中的Copy方式速度是最快的,次之是指针遍历方式。
有一点就是为什么迭代的方式会比数组遍历的方式还要慢那么多,正常应该是比数组快一些才是正确的。
(cv :: copyByArrayWay)数组at遍历方式
(cv :: copyByRowPtrWay)行指针遍历方式
(cv :: copyByPtrWay)指针遍历方式
(cv :: copyByIteratorWay)迭代方式
(cv :: copyByOpenCv)OpenCv copy方式
数组遍历方式耗时: 0.3496毫秒
行指针遍历方式耗时: 0.2317毫秒
指针遍历方式耗时: 0.3716毫秒
迭代方式耗时: 0.5014毫秒
Opencv copy方式耗时: 0.1565毫秒
LUT方式耗时: 0.4273毫秒
#include "opencv2\opencv.hpp"
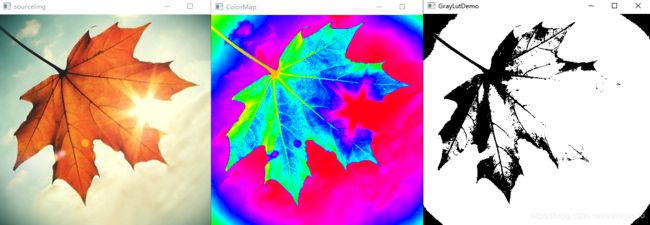
#include 4.(cv :: applyColorMap) 在OpenCV中对灰度图进行颜色映射,实现数据的色彩化
- 什么是色彩映射:
说直白点就是将各种数据映射成颜色信息,例如:温度,高度,压力,密度,湿度,城市拥堵数据等等
色彩化后更加直观表达
在OpenCV里可以使用
Mat im_gray = imread("pluto.jpg", IMREAD_GRAYSCALE);
Mat im_color;
applyColorMap(im_gray, im_color, COLORMAP_JET);
这种方式将一个灰度数据安装一定得映射方式对应上一个颜色值,灰度图里存储你的温度数据,高度数据什么的都可以
OpenCV applyColorMap默认的映射方式如下:

#include "opencv2\opencv.hpp"
#include 执行结果: