基于householder变换的QR分解
QR分解的定义
m和n为任意正整数,给出 A ∈ C m × n A\in C^{m\times n} A∈Cm×n,任意矩阵都可以不需要满秩等条件,则 A A A可分解为 A = Q R A=QR A=QR,其中 Q ∈ C m × m Q\in C^{m\times m} Q∈Cm×m为一正交阵, R ∈ C m × n R\in C^{m \times n} R∈Cm×n为一上三角阵。
存在性:
唯一性:
householder变换
考虑一个位于 R n R^n Rn空间的超平面,以向量 ω \omega ω为法向量,该超平面可表示为:
S = [ x ∣ ω T x = 0 , ∀ x ∈ R n ] S=[x|\omega^Tx=0,\forall x\in R^n] S=[x∣ωTx=0,∀x∈Rn]
该超平面是由无数垂直与 ω \omega ω的向量组成的,并且是 R n R^n Rn的子空间,其维度/秩为n-1,因为,对于 ω T x = 0 \omega^Tx=0 ωTx=0,有下列齐次线性方程组成立:
[ x 1 x 2 . . x n ] ω = 0 \begin{bmatrix} x_1 \\x_2 \\ . \\.\\x_n\end{bmatrix}\omega=0 ⎣ ⎡x1x2..xn⎦ ⎤ω=0
对于该 A X = 0 AX=0 AX=0,有唯一解,因此 r a n k ( A ) = n − 1 rank(A)=n-1 rank(A)=n−1。
对于任意模长为1的法向量 ω ∈ R n \omega \in{R^n} ω∈Rn,有反射矩阵 H = I − 2 ω ω T H=I-2\omega\omega^T H=I−2ωωT,显然,该反射矩阵为一对称正交阵,即满足: H = H T H=H^T H=HT, H H = I HH=I HH=I
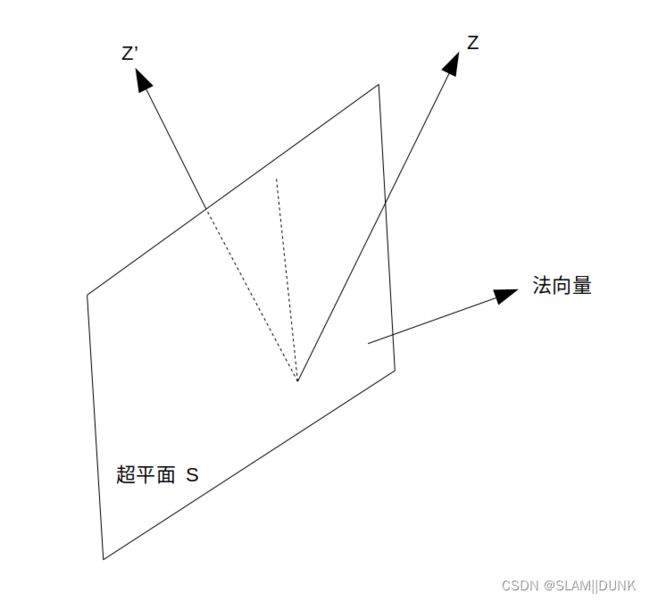
将该反射矩阵 H H H作用与任意一个向量 Z ∈ R n Z \in R^n Z∈Rn,即 H Z HZ HZ,将得到一个与 Z Z Z关于 H H H超平面S对称的向量 Z ′ Z' Z′,如上图所示,这种反射变换即householder变换。
基于householder变换的QR分解
核心推论:
任意两个范数相同的向量 z 1 , z 2 z_1,z_2 z1,z2, ∥ z 1 ∥ 2 = ∥ z 2 ∥ 2 , \|z_1\|_2=\|z_2\|_2, ∥z1∥2=∥z2∥2,存在一个超平面 S S S,使得 z 1 z_1 z1和 z 2 z_2 z2关于超平面 S S S对称,因此,有householder变换矩阵 H H H,使得 z 1 = H z 2 z_1=Hz_2 z1=Hz2.
基于此推论,我们可以找到一个householder变换矩阵,使得矩阵A的最左边的向量 v v v变为仅第一行元素非0而其他元素为0的向量 [ x 0 . . 0 ] \begin{bmatrix} x \\0 \\ . \\.\\0\end{bmatrix} ⎣ ⎡x0..0⎦ ⎤, x = ∥ v ∥ 2 , x=\|v\|_2, x=∥v∥2,于是迭代此操作将矩阵A变换为一个上三角矩阵。算法思路简单,下面给出C++实现:
/**
* @brief: QR分解
* @details 将任意m.n维矩阵 A 分解为 Q(m.m) x R(m.n)
* @param {MatrixXd const&} m_in 输入矩阵
* @param {MatrixXd&} Q Q正交矩阵
* @param {MatrixXd&} R 上三角矩阵
* @return {*}
*/
void HouseholderQR(Eigen::MatrixXd const& m_in, Eigen::MatrixXd& Q, Eigen::MatrixXd& R) {
int row = m_in.rows();
int col = m_in.cols();
R = m_in;
Eigen::MatrixXd P = Eigen::MatrixXd::Identity(row, row);
for (int i = 0; i < col; i++) {
if (i == row) break;
Eigen::VectorXd v = R.block(i, i, row - i, 1);
double roi = v.norm();
Eigen::VectorXd base = Eigen::MatrixXd::Zero(row - i, 1);
base(0) = 1;
Eigen::VectorXd omega_v = v - roi * base;
omega_v.normalize();
R.block(i, i, row - i, col - i) = R.block(i, i, row - i, col - i) -
2 * omega_v * (omega_v.transpose() * R.block(i, i, row - i, col - i));
P.block(i, 0, row - i, row) = P.block(i, 0, row - i, row) -
2 * omega_v * (omega_v.transpose() * P.block(i, 0, row - i, row));
}
Q = P.transpose();
}
总的时间复杂度 O ( n 3 ) O(n^3) O(n3)。
注意,代码中
2 * omega_v * (omega_v.transpose() * R.block(i, i, row - i, col - i))
不要写成
2 * omega_v * omega_v.transpose() * R.block(i, i, row - i, col - i)
因为,前一种写法先执行(omega_v.transpose() * R.block(i, i, row - i, col - i)),为向量和矩阵相乘,时间复杂度 O ( N 2 ) O(N^2) O(N2),然后再将omega_v和括号里运算的结果进行相乘,为列向量乘行向量,时间复杂度为 O ( N 2 ) O(N^2) O(N2),因此叠加后总的时间复杂度依然为 O ( N 2 ) O(N^2) O(N2)。
而第二种写法先执行omega_v * omega_v.transpose() 变成了一个矩阵,接下来就是矩阵与矩阵相乘,时间复杂度为 O ( N 3 ) O(N^3) O(N3),因此我们将运算拆分成矩阵与向量的乘法,而不是矩阵与矩阵的乘法。
实验:
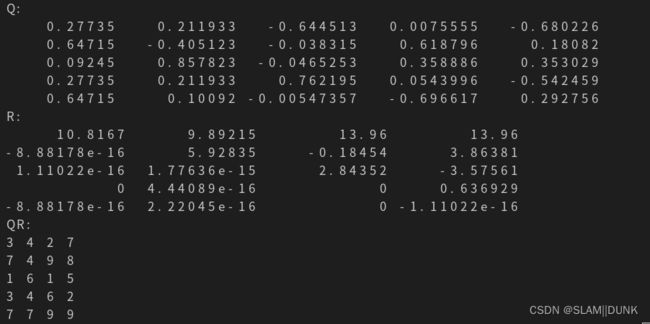
1、超定 m > n
Eigen::Matrix<double, 5, 4> m_in;
m_in << 3, 4, 2, 7,
7,4,9,8,
1,6,1,5,
3,4,6,2,
7,7,9,9;
结果:
 2、方阵 m = n
2、方阵 m = n
Eigen::Matrix<double, 4, 4> m_in;
m_in << 3, 4, 2, 7,
7,4,9,8,
1,6,1,5,
3,4,6,2;
结果:

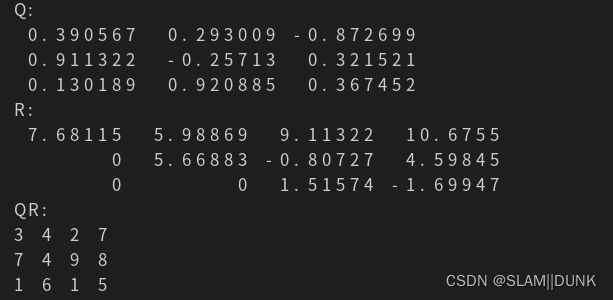
3、欠定 m < n
Eigen::Matrix<double, 3, 4> m_in;
m_in << 3, 4, 2, 7,
7,4,9,8,
1,6,1,5;
总结:
基于householder变换的QR分解对于任意维度的矩阵都适用,对于任意m行n列的矩阵,QR分解将其分解为
m行m列的正交矩阵Q以及m行n列的上三角矩阵R。