双目视觉之对极几何
对极几何(Epipolar Geometry)
本文为我翻译了一篇国外的ppt,并在此基础上进行了修改并写了自己的见解。
先思考一个问题:用两个相机在不同的位置拍摄同一物体,如果两张照片中的景物有重叠的部分,我们有理由相信,这两张照片之间存在一定的对应关系(模拟人眼)。本节的任务就是如何描述它们之间的对应关系,描述工具是对极几何 ,它是研究立体视觉的重要数学方法。要寻找两幅图像之间的对应关系,最直接的方法就是逐点匹配,如果加以一定的约束条件对极约束(epipolar constraint),搜索的范围可以大大减小。从2D平面搜索转为1D直线搜索,搜索速度也会提高
先回顾简单的立体成像系统。这是一种特殊情况,两相机成像平面并排,左右相机公式即为图像物理坐标系和相机坐标系的转换关系,视差 d = xl - xr(xl和xr是在图像物理坐标系上,原点在Z轴)


根据三角形相似原理,能够得到 (xr是负数,所以是减号)

实际上,跟一般的情况,两个相机肯定不可能完全对准,它们坐标无任何约束关系,相机的内部参数可能不同,甚至是未知的。要刻画这种情况下的两幅图像之间的对应关系,需要引入两个重要的概念——对极矩阵(Epipolar Matrix)和基本矩阵(Fundamental Matrix)
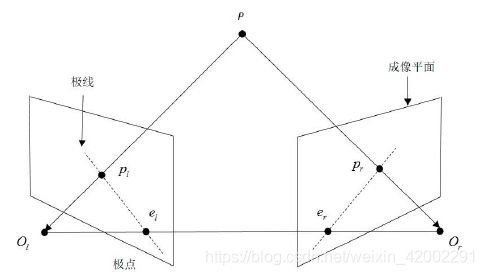
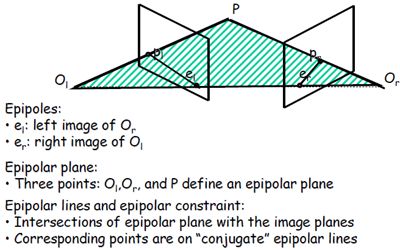
一些概念:P是空间点,pl和pr是成像点,el和er是极点(也就是光心Ol和Or连线和成像面的交点),点P,Ol和Or组成的平面叫极平面,pl和el的连线以及pr和er的连线叫极线(也就是极平面和成像面的交线),级线约束就是两极线上点的对应关系。(左相机上一点,在右相机上的对应点肯定在其极线上)
两相机坐标系间的转换关系 (R是左相机相对右相机的转换矩阵,向量Pl-T算出Pr是在左相机坐标系的,乘R后的Pr是在右相机坐标系的),这里的R是正交矩阵(矩阵的逆等于其转置)。

三个向量共线,混合积为0(或者理解成T叉乘Pl为极平面的法向量n,n和Pl垂直,点积为0)


将叉积写成矩阵的形式,这是个3x1的矩阵,再分离出S(用到了计算叉积的公式)

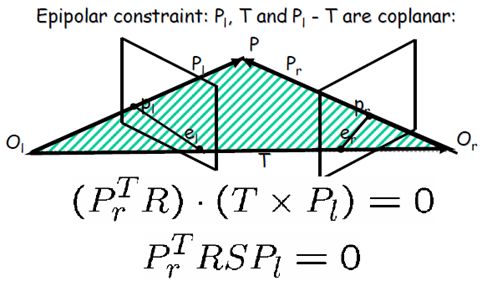
令E=RS,E就是定义的本质矩阵(Essential Matrix),右下角的方程即左像点和右像点的约束关系。


本质矩阵E的性质:has rank 2(秩为2),and depends only on the EXTRINSIC Parameters (R & T)(仅依赖于外部参数R和T,R是左相机相对右相机的转换矩阵Rotation,T是点Ol在Or中的坐标,也就是平移向量Translation,不要看向量方向,这是根据他公式来的,这里左相机相当于动系,如果右相机是动系的话,我也推了下,结果是一样的,而且还少了正交矩阵的逆是转置那一步)
结合成像的关系(图像物理坐标系和相机坐标系间)小写pr和pl是在图像物理坐标上,大写的是在相机坐标系上。

方框中的方程被称为:Longuet-Higgins equation
设l为像平面上一条直线,则有直线方程 au+bv+c=0 ,由点线结合关系有

因此能推出下式。(注意:我认为下面这个直线lr是在图像物理坐标系下的)

这样就可以用几何的观点来解释上述方程:左像平面上的一点pl乘本质矩阵E,结果为一条直线,该直线是右像平面上pl对应点的极线,即pr就在此极线上。同理有

Remember: epipoles belong to the epipolar lines 注意到极点也在极线上
![]()
![]()
And they belong to all the epipolar lines 极点在所有的极线上,也就是无论pl和pr怎么变,上面两式都得0,则有

本质矩阵E采用的是相机的外部参数,也就是说采用相机坐标(The essential matrix uses CAMERA coordinates),如果要分析数字图像,则要考虑像素坐标(u,v),此时需要用到内部参数(To use image coordinates we must consider the INTRINSIC camera parameters)

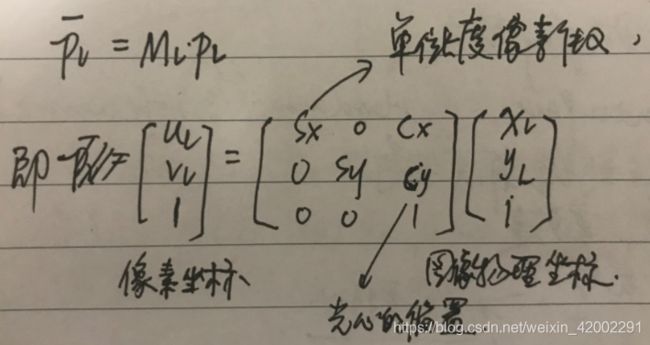
short version: The same equation works in pixel coordinates too! 转到图像像素坐标系上考虑有 (杠表示在图像像素坐标系下)

![]()
F的一些性质如下:has rank 2 秩为2,depends on the INTRINSIC and EXTRINSIC Parameters (f, etc ; R & T) 取决于内参和外参
Analogous to essential matrix. The fundamental matrix also tells how pixels (points) in each image are related to epipolar lines in the other image. 和本质矩阵E类似,基本矩阵F还说明了每个图像中的像素(点)如何与另一个图像中的极线相关。
再用到前面提到的点线关系,右像平面像点在右极线上,则有以下关系 (lr杠是在图像像素坐标系下)

由此可知,通过在左像平面获得像素点坐标,乘上基本矩阵F,可右平面极线的方程(a,b,c)