数字图像处理——隐形眼镜缺陷检测算法
数字图像处理——隐形眼镜缺陷检测算法
摘 要:本文致力于寻找出一种具有较强鲁棒性的检测隐形眼镜边缘缺陷的方法。本文针对图像中物体几何形状的特殊性,提出了一种基于霍夫变换的缺陷检测算法,并在低噪声图像的缺陷检测中取得了不错的效果。在此过程中,本文还分别对残缺图像、大缺陷图像以及含椒盐噪声的图像进行了实验,仅通过改变预处理的一些步骤就可达到相同的检测效果,验证了该算法的鲁棒性。
关键词:霍夫变换;边缘检测;缺陷检测;机器视觉;图像处理
Abstract: This paper aims to find a robust method to detect the edge defects of contact lenses. In this paper, a defect detection algorithm based on Hough transform is proposed according to the particularity of object geometry in the image, and good results are obtained in the defect detection of low noise image. In this process, experiments are carried out on incomplete images, large defect images and images with salt and pepper noise. The same detection effect can be achieved only by changing some steps of preprocessing, which verifies the robustness of the algorithm.
Key Words: Hough transform; edge detection; defect detection; machine vision; image processing
目录
- 数字图像处理——隐形眼镜缺陷检测算法
-
- 摘要
- 隐形眼镜图像缺陷检测方法
-
- 理想图像的缺陷检测
- 霍夫圆变换简介
- 残缺图像的缺陷检测
- 含大缺陷图像的缺陷检测
- 含椒盐噪声图像的缺陷检测
- 结论
- 参考文献:
- 附录
-
- MATLAB代码:
-
- 原图处理部分
- 椒盐噪声处理部分
- 其他算子(孔洞填充&霍夫变换)
摘要
随着现代工业的发展,基于机器视觉的缺陷检测方法在工业生产中有着极大的应用空间。然而在实际的缺陷检测过程中,由于硬件设施的局限性与环境的复杂性,不得不考虑各种例如相机畸变、信号传输或者灰尘污染等实际问题带来的干扰。本文主要考虑了三种干扰情况:图像残缺,大缺陷物件,椒盐噪声[4]。这三类情况对算法鲁棒性的要求都相对较高。因此,开发一种满足较强鲁棒性的缺陷检测算法,是亟待解决的关键问题。
隐形眼镜图像缺陷检测方法
理想图像的缺陷检测
图1为一张存在缺陷的隐形眼镜图像,隐形眼镜的右下角存在缺陷。需要将缺陷检测出来,首先应该确定缺陷的定义。
由图像可知,图像中半径与其他边缘点不同的地方即为缺陷。检测问题就可以转化为如何求得隐形眼镜的圆心与半径。本文采用霍夫变换圆检测方法来确定圆心与半径,并取得了不错的实验效果。
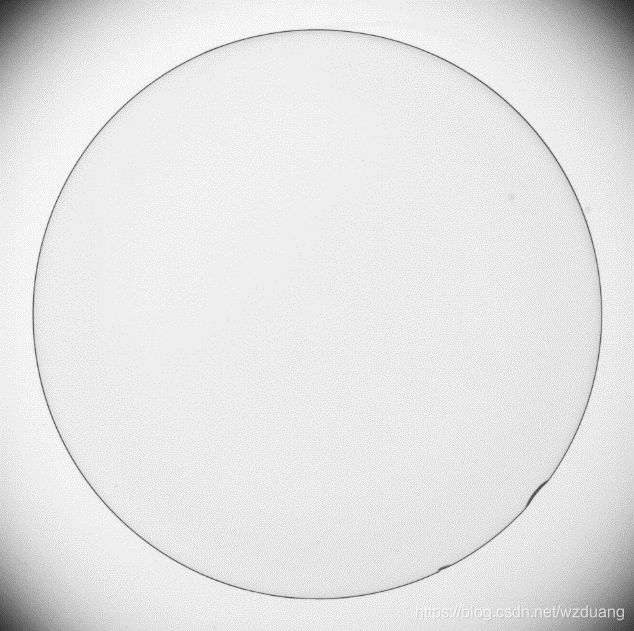
图1 存在缺陷的隐形眼镜图像
由于霍夫变换输入的是图像的二值化边缘图,由此需要先对图像进行一点预处理,将隐形眼镜的边缘提取出来。对于图1,笔者采用了Prewitt算子提取边缘信息。Prewitt算子是一种一阶微分算子,利用像素点上下左右邻点灰度差,在边缘处达到极值检测边缘,对噪声具有平滑的作用。
对数字图像 f ( x , y ) f\left(x,y\right) f(x,y),有如下公式:
G ( i ) = ∣ [ f ( i − 1 , j − 1 ) + f ( i − 1 , j ) + f ( i − 1 , j + 1 ) ] − [ f ( i + 1 , j − 1 ) + f ( i + 1 , j ) + f ( i + 1 , j ) + f ( i + 1 , j + 1 ) ] ∣ ( 1 ) G\left(i\right)=\left|\left[f\left(i-1,j-1\right)+f\left(i-1,j\right)+f\left(i-1,j+1\right)\right]-\left[f\left(i+1,j-1\right)+f\left(i+1,j\right)+f\left(i+1,j\right)+f\left(i+1,j+1\right)\right]\right| (1) G(i)=∣[f(i−1,j−1)+f(i−1,j)+f(i−1,j+1)]−[f(i+1,j−1)+f(i+1,j)+f(i+1,j)+f(i+1,j+1)]∣(1)
G ( j ) = ∣ [ f ( i − 1 , j + 1 ) + f ( i , j + 1 ) + f ( i + 1 , j + 1 ) ] − [ f ( i − 1 , j − 1 ) + f ( i , j − 1 ) + f ( i + 1 , j − 1 ) ] ∣ ( 2 ) G\left(j\right)=\left|\left[f\left(i-1,j+1\right)+f\left(i,j+1\right)+f\left(i+1,j+1\right)\right]-\left[f\left(i-1,j-1\right)+f\left(i,j-1\right)+f\left(i+1,j-1\right)\right]\right| (2) G(j)=∣[f(i−1,j+1)+f(i,j+1)+f(i+1,j+1)]−[f(i−1,j−1)+f(i,j−1)+f(i+1,j−1)]∣(2)
Prewitt算子为:
P ( i , j ) = max [ G ( i ) , G ( j ) ] ( 3 ) P\left(i,j\right)=\max{\left[G\left(i\right),G\left(j\right)\right]}(3) P(i,j)=max[G(i),G(j)](3)
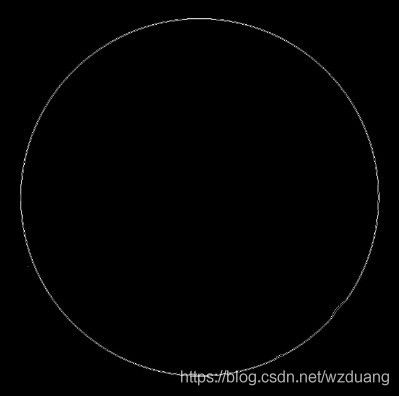
图2 边缘提取后的二值化图像
二值化后的图像如图2所示。
霍夫圆变换简介
在数字图像处理中,霍夫变换理论上可以检测出图像中任何可用解析几何方程表达的规则图形。霍夫变换在直线检测、圆或椭圆检测中得到了广泛的应用。
对于任意圆形,在笛卡尔坐标系中,方程表示为:
( x − a ) 2 + ( y − b ) 2 = r 2 ( 4 ) \left(x-a\right)^2+\left(y-b\right)^2=r^2\ (4) (x−a)2+(y−b)2=r2 (4)
其中,圆心的坐标为\left(a,b\right),半径为r。当半径一定,且图形的边缘坐标已知时,图形边缘上的每一个点\left(x_0,y_0\right),在由参数a,b构成的平面坐标系中为一个圆。此时,方程可改写为:
( a − x 0 ) 2 + ( b − y 0 ) 2 = r 0 2 ( 5 ) \left(a-x_0\right)^2+\left(b-y_0\right)^2=r_0^2 (5) (a−x0)2+(b−y0)2=r02(5)
若多点共圆,则这些点由(2)式得到的若干圆交于一点,找出此交点即可确定该圆形。然而在实际处理过程各点可能存在一定偏差,无法形成一个完美的交点,故通过投票等方式找出霍夫空间中亮度最高的区域,从而确定圆心与半径。图3即为找出的霍夫圆与圆心的位置。

图3 霍夫圆与圆心位置
找出圆心位置与半径后,通过计算边缘图中每一点与圆心的距离,并设定一个区间。将区间之外的点定义为缺陷:
{ e m i n < e < e m a x e = ∣ r − [ ( x 0 − a ) 2 + ( y 0 − b ) 2 ] ∣ ( 6 ) \{_{e_{min}
其中, e m a x e_{max} emax与 e m i n e_{min} emin为设定好的边界值,满足上述式子的点 ( x 0 , y 0 ) \left(x_0,y_0\right) (x0,y0)为边界,否则为缺陷。最后将缺陷点在图像中标注出来。结果如图4。
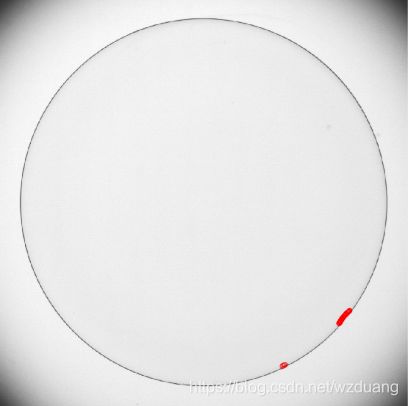
图4 缺陷检测结果
残缺图像的缺陷检测
若图像存在残缺,或摄像头并不能完整照出图像,如图5即为一张存在缺陷的图像。
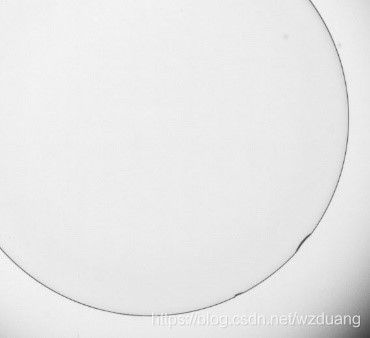
图5 残缺的隐形眼镜图像
由于霍夫变换采用投票的方式找出霍夫空间中亮度最高的区域,确定圆心与半径。对于残缺程度不大的图像仍然能维持一定的鲁棒性。检测效果如图6,图7所示。

图6 残缺图像的霍夫变换图像
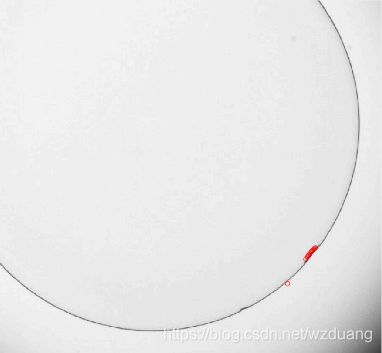
图7 残缺图像的缺陷检测效果
含大缺陷图像的缺陷检测
由于霍夫变换采用投票的方式找出霍夫空间中亮度最高的区域,确定圆心与半径。对于含有离群点的图像仍然能维持一定的鲁棒性。待检测图像如图8所示。
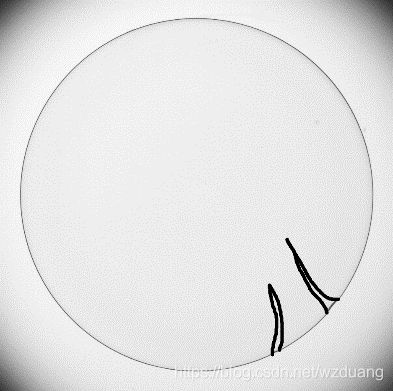
图8 含有大缺陷的隐形眼镜图像
但是,由于缺陷较大,需要对先前确定的(6)式中的 e m i n e_{min} emin与 e m a x e_{max} emax值做一些调整。检测效果如图9,图10所示。
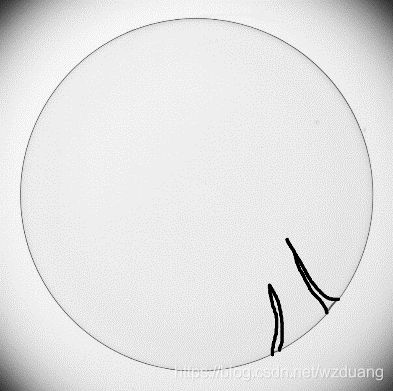
图9 大缺陷图像的边缘二值化图
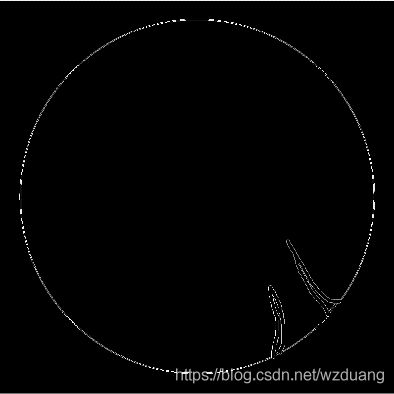
图10 大缺陷图像的缺陷检测效果
含椒盐噪声图像的缺陷检测
由于实际情况下图片中都会含有一定的噪声,本文也探究了含有椒盐噪声情况下图像的缺陷检测方法。
去除椒盐噪声最常用的算法是中值滤波,中值滤波原理如下:
若一个像素点的值为 9 9 9,该像素点及其 3 ∗ 3 3*3 3∗3的临近像素点结构元的值如表1所示,中值滤波后的中心像素点的值为这九个数的中位数。
| 4 | 7 | 8 |
| 2 | 9 | 6 |
| 4 | 1 | 5 |
表1 中值滤波元结构示例
| \ | \ | \ |
| \ | 5 | \ |
| \ | \ | \ |
表2 中值滤波结果
滤波结果如图11所示(原图信噪比0.9):
图11 含有椒盐噪声的图像(信噪比0.9)
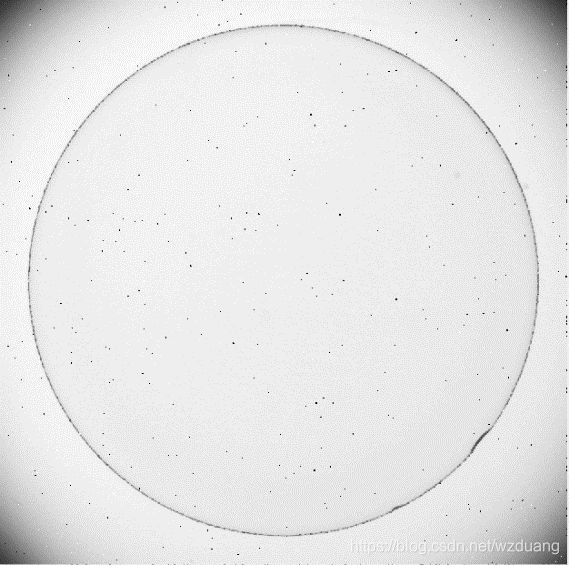
图12 中值滤波后的隐形眼镜图像
滤波后的图像如图12所示,二值化后的效果如图13。从图13可以看出图像中仍然含有一定的噪声,将提取边缘后可以采用对于一些小的噪点可以采用含有阈值的孔洞填充将其去除,同时使用形态学膨胀操作突出边界特征。
带阈值的孔洞填充算法基本思想如公式7所示。
X k = ( X k − 1 ⊕ B ) ∩ A c , k = 1 , 2... ( 7 ) X_k=\left(X_{k-1}\oplus B\right)\cap A^c,k=1,2...(7) Xk=(Xk−1⊕B)∩Ac,k=1,2...(7)
首先找出所有孔洞的位置,只需知道洞中的一个点的坐标即可;新建一张全零图,用0表示背景,1表示前景,大小与原图相同;取出一个洞的坐标,对该新图用一个结构元进行膨胀,然后再与原图的反(此时含有孔洞的地方应全为1)求与,即对该点执行公式(7)中的操作;如果检测到一次操作完的结果与操作前相同,则结束迭代,再取出下一个洞的坐标,返回到先前操作,直到所有洞都填充完成;完成填充后,此时新图中为数值为1的位置即为需要填补的孔洞,将新图与原图相或即得到孔洞填充完成的图像。
由于每个被填充的孔洞都属于一个连通域,通过其领域的迭代算出该连通域的面积,再删除面积小于一个阈值的连通域即可。处理后的二值化图像如图14所示。

图13 中值滤波后二值化图像
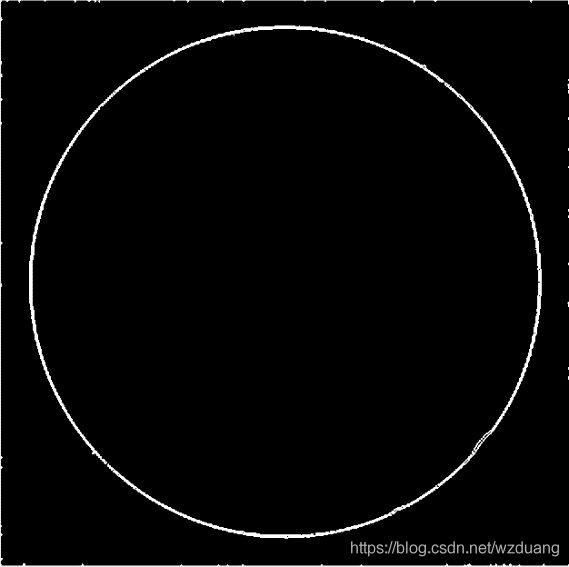
图14 孔洞填充、形态学膨胀后的二值化图像
最终检测结果如图15。可以看到检测结果仍能保持准确性。

图14 中值滤波后图像缺陷检测效果
通过实验,在信噪更低的情况下,该算法仍然可以较准确的检测出缺陷的位置。
图16 信噪比0.8的图像

图17 信噪比0.8时检测结果
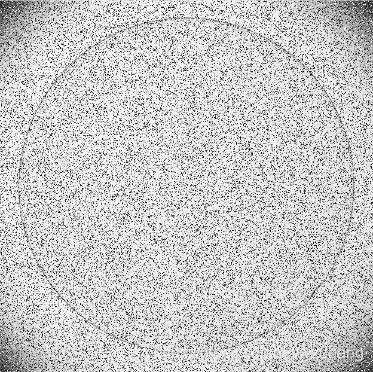
图18 信噪比0.7的图像

图19 信噪比0.7时检测结果
在信噪比达到0.5时,该算法检测失效。
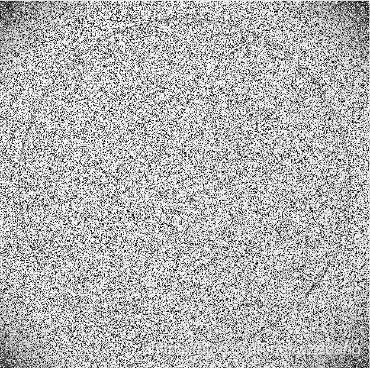
图20 信噪比0.5图像
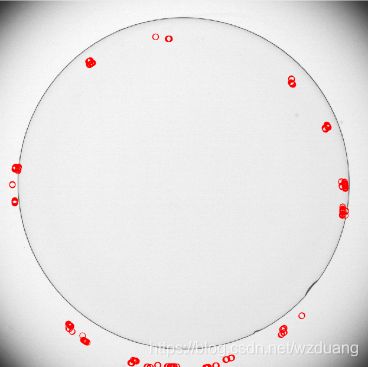
图21 检测失效
结论
经过本文的探究与验证,验证了基于霍夫变换的缺陷检测方法具有较好的鲁棒性与适应性,可以广泛的运用到对规则几何图形的检测中。同时应当注意到的是,霍夫变换在扫描步长与旋转角度取较小值的情况下,虽然检测精度有所提升,但也存在耗费时间较长的问题。故在该算法的实际使用过程中,需要根据实际需求与效果调整算法中的步长参数。
总而言之,基于霍夫变换的缺陷检测有着很好的适用性与潜力。
参考文献:
[1] Richard O. Duda and Peter E. Hart. Use of the Hough Transformation to Detect Lines and Curves in Pictures (PDF). Artificial Intelligence Center (SRI International). April 1971.
[2] 张强, 王正林. 精通MATLAB图像处理[M]. 电子工业出版社, 2009.
[3] 高浩军, 杜宇人. 中值滤波在图像处理中的应用[J]. 信息化研究, 2004, 30(008):35-36.
[4] 董继扬, 张军英. _种筒单的椒盐噪声滤波算法[J]. 计算机工程与应用, 2003(20):27-28+65.
[5] 江峰, 杜军威, 眭跃飞, et al. 基于边界和距离的离群点检测[J]. 电子学报, 2010(03):206-211.
[6] 李文斌 , 王长松. 基于边界信息的孔洞填充算法[J]. 计算机工程与设计, 2008, 29(015):3958-3959,3962.
[7] 雷丽珍. 数字图像边缘检测方法的探讨[J]. 测绘通报, 2006, 2006(3):40-42.
附录
MATLAB代码:
原图处理部分
clear all;clc;close all;
Im = imread('ContactLens_broke.png');
figure;imshow(Im),title('原图'); hold on;
Im = rgb2gray(Im);
% for i=1:532;
% for j=1:937;
% Im(i,j)=0;
% end
% end
thresh = graythresh(Im);%OTSU
[H,W]=size(Im);
%Im = imcrop(Im,[60,60,800,800]);
%预处理z
BW = im2bw(Im,thresh);%二值化
BW = imcomplement(BW);
%figure;imshow(BW),title('二值化图'); hold on;
prewittBW=edge(Im,'prewitt');%prewitt边缘算子
%DoubleBW=im2double(BW);
%DoubleBW(prewittBW)=1;% 将边缘显示为白色
DoubleBW=zeros(H,W);
DoubleBW(prewittBW)=1;
DoubleBW = im2bw(DoubleBW,0.1);
% dilate=strel('square',3);
% DoubleBW=imdilate(DoubleBW,dilate);
% erode=strel('square',3);
% DoubleBW=imerode(DoubleBW,erode);
%BW = im2bw(DoubleBW,0.2);
subplot;imshow(DoubleBW),title('二值化图'); hold on;
imwrite(DoubleBW,"./DoubleBW.jpg");
[hough_space,hough_circle,para] = hough_Circle(DoubleBW,1,1,300,450,0.8);
figure;imshow(hough_circle),title('霍夫变换');hold on;
X0 = mean(para(2,:));Y0 = mean(para(1,:));Radius=mean(para(3,:));
plot(X0,Y0,"*");
imwrite(hough_circle,"hough.jpg");
%求损坏区域
Index=find(DoubleBW>0);
vX = floor( ( Index - 1 ) / H ) + 1;
vY = mod( Index - 1, H ) + 1;
vDiff = abs( Radius - sqrt( ( vX - X0 ) .^ 2 + ( vY - Y0 ) .^ 2 ) );
vDefectIdx = find( vDiff >3.2 );%& vDiff < 6 );
vDefectX = vX( vDefectIdx );
vDefectY = vY( vDefectIdx );
figure; imshow( Im ); axis image; colormap( gray ); title( 'Detected defects' );
hold on; plot( vDefectX, vDefectY, 'ro' );
椒盐噪声处理部分
clear all; clc; close all;
Im=imread( 'ContactLens.tif' );
Im=Im(:,:,1);
[H,W]=size(Im);
IMHalf=zeros(H/2,W);
for i=1:H/2
IMHalf(i,:)=Im(i+H/2,:);
end
IMSlice=zeros(H/2,floor(4*W/5));
for i=1:floor(4*W/5)
IMSlice(:,i)=IMHalf(:,i+floor(W/5));
end
%salt & pepper noise
IM1=imnoise(Im,'salt & pepper',0.5);
figure; imshow( IM1 ); axis image; colormap( gray );
%salt & pepper filter
IM2=medfilt2(IM1);
figure; imshow( IM2 ); axis image; colormap( gray );
figure;histogram(IM2);
figure; imshow( IM2 ); axis image; colormap( gray );
BIM2=edge(IM2,'prewitt');
OP=[0,1,0;1,1,1;0,1,0];
BIM3=imdilate(BIM2,OP);
BIM3=imcomplement(BIM3);
BIM3=fillsmallholes(BIM3,100);
BIM3=imcomplement(BIM3);
figure; imshow( BIM3 ); axis image; colormap( gray );
Index=find(BIM3>0);
vX = floor( ( Index - 1 ) / H ) + 1;
vY = mod( Index - 1, H ) + 1;
figure; imshow( BIM2 );
% 霍夫变换
step_r=0.1;
step_angle=0.1;
minr=420;
maxr=421;
thresh = 0.9;
[hough_space,hough_circle,para] = hough_Circle(BIM3,step_r,step_angle,minr,maxr,thresh);
figure; imshow( hough_circle );
X0=mean(para(2,:));
Y0=mean(para(1,:));
Radius=mean(para(3,:));
figure; imshow( Im ); axis image; colormap( gray ); title( 'Detected defects' );
hold on; plot( X0, Y0, 'ro' );
%缺陷检测
vDiff = abs( Radius - sqrt( ( vX - X0 ) .^ 2 + ( vY - Y0 ) .^ 2 ) );
vDefectIdx = find( vDiff >3.5 & vDiff<4.5);
vDefectX = vX( vDefectIdx );
vDefectY = vY( vDefectIdx );
figure; imshow( Im ); axis image; colormap( gray ); title( 'Detected defects' );
hold on; plot( vDefectX, vDefectY, 'ro' );
其他算子(孔洞填充&霍夫变换)
function new=fillsmallholes(bw,threshold)
% 小于阈值的洞会被填上
filled = imfill(bw, 'holes');
holes = filled & ~bw;
bigholes = bwareaopen(holes, threshold);
smallholes = holes & ~bigholes;
new = bw | smallholes;
function [hough_space,hough_circle,para] = hough_Circle(BW,step_r,step_angle,r_min,r_max,p)
%[HOUGH_SPACE,HOUGH_CIRCLE,PARA] = HOUGH_CIRCLE(BW,STEP_R,STEP_ANGLE,R_MAX,P)
%------------------------------算法概述-----------------------------
% 该算法通过a = x-r*cos(angle),b = y-r*sin(angle)将圆图像中的边缘点
% 映射到参数空间(a,b,r)中,由于是数字图像且采取极坐标,angle和r都取
% 一定的范围和步长,这样通过两重循环(angle循环和r循环)即可将原图像
% 空间的点映射到参数空间中,再在参数空间(即一个由许多小立方体组成的
% 大立方体)中寻找圆心,然后求出半径坐标。
%-------------------------------------------------------------------
%------------------------------输入参数-----------------------------
% BW:二值图像;
% step_r:检测的圆半径步长
% step_angle:角度步长,单位为弧度
% r_min:最小圆半径
% r_max:最大圆半径
% p:以p*hough_space的最大值为阈值,p取0,1之间的数
%-------------------------------------------------------------------
%------------------------------输出参数-----------------------------
% hough_space:参数空间,h(a,b,r)表示圆心在(a,b)半径为r的圆上的点数
% hough_circl:二值图像,检测到的圆
% para:检测到的圆的圆心、半径
%-------------------------------------------------------------------
% From Internet,Modified by mhjerry,2011-12-11
[m,n] = size(BW);
size_r = round((r_max-r_min)/step_r)+1;
size_angle = round(2*pi/step_angle);
hough_space = zeros(m,n,size_r);
[rows,cols] = find(BW);
ecount = size(rows);
% Hough变换
% 将图像空间(x,y)对应到参数空间(a,b,r)
% a = x-r*cos(angle)
% b = y-r*sin(angle)
for i=1:ecount
for r=1:size_r
for k=1:size_angle
a = round(rows(i)-(r_min+(r-1)*step_r)*cos(k*step_angle));
b = round(cols(i)-(r_min+(r-1)*step_r)*sin(k*step_angle));
if(a>0&a<=m&b>0&b<=n)
hough_space(a,b,r) = hough_space(a,b,r)+1;
end
end
end
end
% 搜索超过阈值的聚集点
max_para = max(max(max(hough_space)));
index = find(hough_space>=max_para*p);
length = size(index);
hough_circle=zeros(m,n);
for i=1:ecount
for k=1:length
par3 = floor(index(k)/(m*n))+1;
par2 = floor((index(k)-(par3-1)*(m*n))/m)+1;
par1 = index(k)-(par3-1)*(m*n)-(par2-1)*m;
if((rows(i)-par1)^2+(cols(i)-par2)^2<(r_min+(par3-1)*step_r)^2+5&...
(rows(i)-par1)^2+(cols(i)-par2)^2>(r_min+(par3-1)*step_r)^2-5)
hough_circle(rows(i),cols(i)) = 1;
end
end
end
% 打印结果
for k=1:length
par3 = floor(index(k)/(m*n))+1;
par2 = floor((index(k)-(par3-1)*(m*n))/m)+1;
par1 = index(k)-(par3-1)*(m*n)-(par2-1)*m;
par3 = r_min+(par3-1)*step_r;
%fprintf(1,'Center %d %d radius %d\n',par1,par2,par3);
para(:,k) = [par1,par2,par3]';
end