VAE生成模型(附VAE实现mnist代码)
本文是在基于此博客上的转载,如有讲述不清楚的地方,推荐原博客
【学习笔记】生成模型——变分自编码器
自编码器AE
自编码器是一类在半监督学习和非监督学习中使用的人工神经网络,其功能是通过将输入信息作为学习目标,对输入信息进行表征学习。
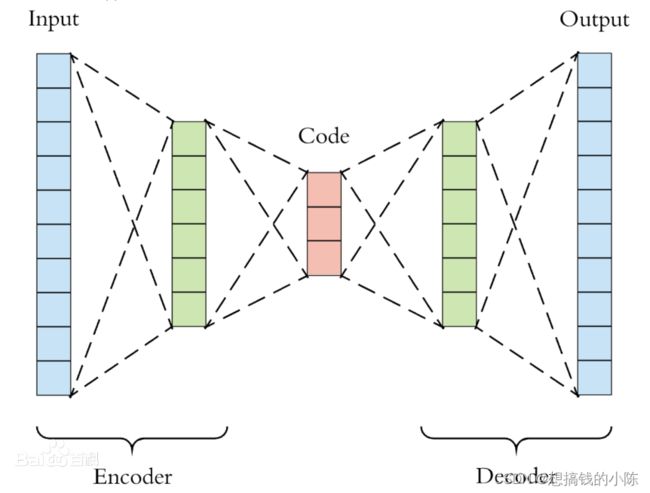
AutoEncoder 包括 编码器(Encoder) 和 解码器(Decoder) 两部分。Encoder 过程是将原先的数据(常用于图像方向)压缩为低维向量;Decoder 则是把低维向量还原为原来数据。
因为自编码常用于图像方向,因为一张图每一个像素点都被看作是一个特征,所以随便一张现实中的图都属于高维向量。所以很多教程直接把这里提到的数据用 图片 来代替,Decoder 的过程也就是转换为原来的图像。
变分自编码(Variational AutoEncoder)
定义
VAE 模型是一种包含隐变量的生成模型,它利用神经网络训练得到两个函数(也称为推断网络和生成网络),进而生成输入数据中不包含的数据。
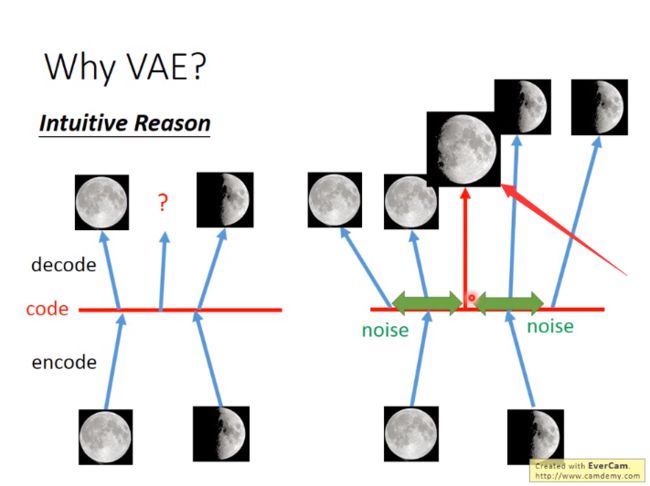
图片左边部分是 AutoEncoder 的简单例子:我们把一张满月的图片 Encoder 后得到 code,这个code被decoder 后又转换为满月图,弦月图也是如此。注意它们直接的一对一关系。
图片右边部分是 VAE 的简单例子,在 code 中添加一些 noise,这样可以让在满月对应 noise 范围内的code 都可以转换为满月,弦月对应的noise 范围内的code也能转换成弦月。
但当我们在code中进行采样时,在不是满月和弦月对应的noise的code中采样时,decoder出来的图片可能是介于满月和弦月之间的图。
也就是说,VAE 产生了输入数据中不包含的数据,(可以认为产生了含有某种特定信息的新的数据),而 AE 只能产生尽可能接近或者就是以前的数据(当数据简单时,编码解码损耗少时)。
图片左边那个问号的意思是当对 AE 中的code进行随机采样时,它介于满月与弦月之间的数据,decoder后可能会输出什么?
可能会输出满月,可能会输出弦月,但是最有可能输出的是奇奇怪怪的图片。
隐变量
上面已经讲过隐变量的基本概念,这里介绍隐变量在 VAE模型中的作用及特点。VAE产生的并不是数据的中间层特征,而且产生的是输入数据的均值和方差。
- 隐变量 z 是可以认为是隐藏层数据,它是不限定数目的符合
高斯分布特征的数据。(根据实际情况确定数目) - z zz 由输入数据 X XX 的采样以及参数生成,它既包含 X XX 的信息(这个于 AutoEncoder 的隐藏层类似),同时也满足
高斯分布,方便接下来进行梯度下降或者其他优化技术(By having a Gaussian distribution, we can use gradient descent (or any other optimization technique) to increase P ( X ) P(X)P(X) by making f ( z ; θ ) f(z; \theta)f(z;θ) approach X XX for some z zz ,i.e., gradually making the training data more likely under the generative model.)。 - 隐变量的作用除了让生成网络尽可能还原原来的数据 X,同时也能生成原来数据中不存在的数据。
VAE的模型架构

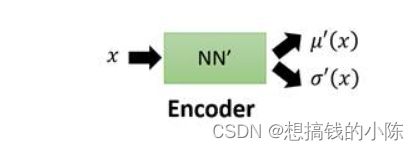
上面这张图就是VAE的模型架构,我们先粗略地领会一下这个模型的设计思想。
在auto-encoder中,编码器是直接产生一个编码的,但是在VAE中,为了给编码添加合适的噪音,编码器会输出两个编码,一个是原有编码(
![]()
),另外一个是控制噪音干扰程度的编码(),第二个编码其实很好理解,就是为随机噪音码(e1,e2,e3)分配权重,然后加上exp(σi)的目的是为了保证这个分配的权重是个正值,最后将原编码与噪音编码相加,就得到了VAE在code层的输出结果(c1,c2,c3)。其它网络架构都与Deep Auto-encoder无异。
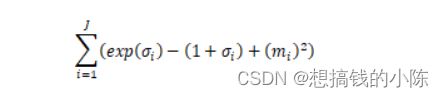
损失函数方面,除了必要的重构损失外,VAE还增添了一个损失函数(见上图Minimize2内容),这同样是必要的部分,因为如果不加的话,整个模型就会出现问题:为了保证生成图片的质量越高,编码器肯定希望噪音对自身生成图片的干扰越小,于是分配给噪音的权重越小,这样只需要将(
![]()
)赋为接近负无穷大的值就好了。所以,第二个损失函数就有限制编码器走这样极端路径的作用,这也从直观上就能看出来,exp(σi)-(1+σi)在σi=0处取得最小值,于是(σi)就会避免被赋值为负无穷大。
上述我们只是粗略地理解了VAE的构造机理,但是还有一些更深的原理需要挖掘,例如第二个损失函数为何选用这样的表达式,以及VAE是否真的能实现我们的预期设想,即“图片能够编码成易于表示的形态,并且这一形态能够尽可能无损地解码回原真实图像”,是否有相应的理论依据。
下面我们会从理论上深入地分析一下VAE的构造依据以及作用原理。
VAE原理

这里以李宏毅的视频为例。假设我们的输入图像的特征是X,我们希望通过P(X)采样得到一个分布,这个分布反映了真实数据的分布。我们就是需要估计出这个分布。P(X)可以看作是一个高斯混合分布(可以理解为任意的数据分布,都可以由若干的m个高斯分布组成),其公式如下:
![]()
P(m)是取到第m个高斯分布的概率,P(X|m)是第m个高斯分布,如下图所示。
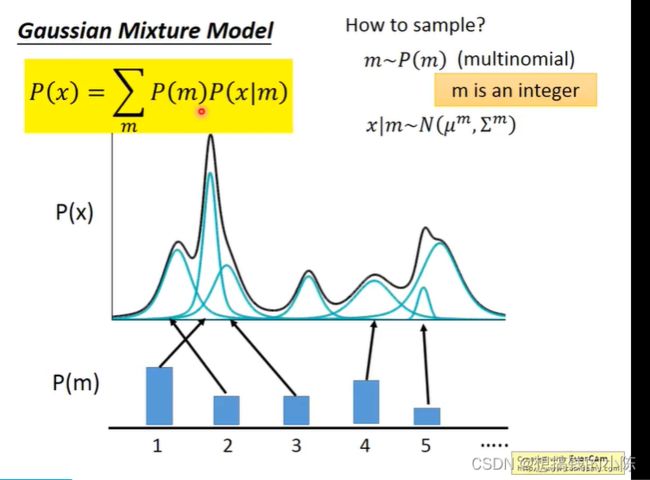
但现实情况下,P(X)通常是由无限个的高斯组成的,以上离散的方式只是存在于限制,因此,将其变为积分的形式,代表由infite的高斯分布组成。公式如:![]() (这里我把m用字母z表示)。其中,
(这里我把m用字母z表示)。其中,
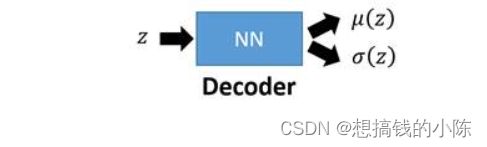
- P(z)是已知的,z~N(0,1)(实际上并不一定要选用(0,1),其他的连续分布都是可行的)可以理解为就是encoder中decoder中的中间变量,但vae将其称之为数据的分布,因为encoder出的不是特征,而是数据的均值和方差。
- P(x|z)是未知的。x|z~N(u(z), σ(z))。
于是,我们真正需要求解的,是u(z)和σ(z)2个函数的表达式。但又因为P(x)通常非常复杂,导致u(z)和sigma(z)都难以计算,所以引入2个神经网络(encoder和decoder)来帮助我们求解。
第一个神经网络叫做Decoder,它求解的是u和σ两个函数,这等价于求解P(x|z)。
第二个神经网络叫做encoder,它求解的是结果是q(z|x),q可以代表任何分布。
值得注意的是,这儿引入第二个神经网路Encoder的目的是,辅助第一个Decoder求解p(x|z),这也是整个VAE理论中最精妙的部分,下面我会详细地解释其中的奥妙。
我们先回到最开始要求解的目标式:
![]()
我们希望P(x)越大越好,这等价求解(我理解为是最大化似然函数):
![]()
注意到
![]()
q(z|x)可以是任何分布,这个式子从左边到右边就是多了一项积分![]() ,这个积分的和为1。
,这个积分的和为1。
对公式1继续展开,
![]()
![]()
![]()
![]()
上面的第二项是一个大于等于0的值,于是我们就找到了一个logP(x)的下界:
![]()
我们把这个下界记为Lb,上面的式子就可以化为
![]()
原本我们需要求P(x|z)使得logP(x)最大,现在引入了一个q(z|x),变成了同时求P(x|z)和q(z|x)使得logP(x)最大,不妨观察一下logP(x)和Lb的关系:
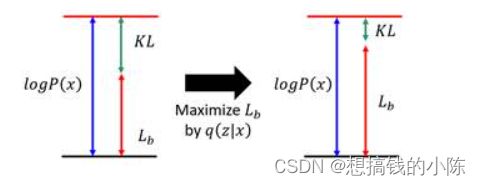
一个有趣的现象是,当我们固定住P(x|z)时,因为logP(x)只与P(x|z)有关,所以logP(x)的值是会不变的,此时我们去调节q(z|x),使得Lb越来越高,同时KL散度越来越小,当我们调节到q(z|x)与P(z|x)完全一致时,KL散度就消失为0,Lb与logP(x)完全一致。由此可以得出,不论logP(x)的值如何,我们总能够通过调节使得Lb等于logP(x),又因为Lb是logP(x)的下界,所以求解Maximum logP(x)等价为求解Maximum Lb。
这个现象从宏观上来看也是很有意思,调节P(x|z)就是在调节decoder,调节q(z|x)就是在调节encoder。于是,VAE的训练逻辑就变成了decoder每前进一步,encoder就调节成与其一致的样子,并且站在那拿“枪”顶住decoder,这样在下次训练的时候decoder就只能前进,不能退步了。
上述便是VAE的巧妙设计之处。再回到我们之前的步骤上,现在需求解Maximum Lb。
注意到

所以,求解Maximum Lb,等价于求解KL的最小值和q(z|x)logP(x|z)dz的最大值。
我们先来求第一项,其实KL的展开式刚好等于:
具体的展开计算过程可以参阅《Auto-Encoding Variational Bayes》的Appendix B。
于是,第一项式子就是第二节VAE模型架构中第二个损失函数的由来。
接下来求第二项,注意到

上述的这个期望,也就是表明在给定q(z|x)(编码器输出)的情况下P(x|z)(解码器输出)的值尽可能高,这其实就是一个类似于Auto-Encoder的损失函数(方差忽略不计的话):

因此,第二项式子就是第二节VAE模型架构中第一个损失函数的由来。
综上,关于VAE模型架构中的理论证明部分至此全部介绍完毕。
代码
导入相关包
#%% 导入包
from AutoEncoder import *
import torch
from torch.utils.data import DataLoader
from torchvision import transforms
from torchvision.datasets import MNIST
from torchvision.utils import save_image
import matplotlib.pyplot as plt下载数据集,并查看前6张图片
#%%
img_transform = transforms.Compose([
transforms.ToTensor()])
path = "../../dataset"
batch_size = 128
dataset = MNIST(path, transform=img_transform, train = True, download=False)
dataIter = DataLoader(dataset, batch_size=batch_size, shuffle=True)
imgs = dataset.data[:6].numpy()
labels = dataset.targets[:6].numpy()
_, axes = plt.subplots(2, 3)
for i in range(2):
for j in range(3):
axes[i][j].imshow(imgs[i*3 + j], cmap='gray')
axes[i][j].set_title("True: " + str(labels[i*3+j]))
axes[i][j].get_xaxis().set_visible(False)
axes[i][j].get_yaxis().set_visible(False)
plt.show()定义VAE模型
class VAE(nn.Module):
# 使用全链接网络
def __init__(self, encoder_structure, decoder_structure, hidden_num):
super(VAE, self).__init__()
self.encoder = nn.Sequential()
for i in range(1, len(encoder_structure)):
self.encoder.add_module("linear"+str(i), nn.Linear(encoder_structure[i-1], encoder_structure[i]))
self.encoder.add_module("relu"+str(i), nn.ReLU())
self.z_layer = nn.Linear(encoder_structure[-1], hidden_num)
self.log_var_layer = nn.Linear(encoder_structure[-1], hidden_num)
self.decoder = nn.Sequential()
for i in range(1, len(decoder_structure)):
self.decoder.add_module("linear"+str(i), nn.Linear(decoder_structure[i-1], decoder_structure[i]))
if(i < len(decoder_structure)-1): self.decoder.add_module("relu"+str(i), nn.ReLU())
def forward(self, x):
self.z_mean, self.z_log_var = self.encode(x)
z = self._reparameters(self.z_mean, self.z_log_var)
self.x_mean = self.decode(z)
return self.z_mean, self.z_log_var, z, self.x_mean
def encode(self, x):
code = self.encoder(x)
z_mean = self.z_layer(code)
z_log_var = self.log_var_layer(code)
return z_mean, z_log_var
def decode(self, z):
x_mean = self.decoder(z)
return x_mean
def loss(self, x, recon_func):
KL_loss = -0.5 * torch.sum(1 + self.z_log_var - self.z_mean.pow(2) - self.z_log_var.exp())
recon_loss = recon_func(self.x_mean, x)
return KL_loss + recon_loss
def _reparameters(self, z_mean, z_log_var):
z0 = torch.randn_like(z_mean)
return z_mean + z0 * torch.exp(0.5*z_log_var)
def train(self, net, dataIter, recon_loss, optimizer, epoches):
device = torch.device('cuda' if torch.cuda.is_available() else 'cpu')
print("training on %s" %(device))
net = net.to(device)
train_loss = [0.]*epoches
for epoch in range(epoches):
cnt = 0
for batch_idx, (data, label) in enumerate(dataIter):
# 前向
data = data.view(data.size(0), -1).to(device)
z_mean, z_log_var, z, x_mean = net(data)
loss = net.loss(data, recon_loss)
# 反向
optimizer.zero_grad()
loss.backward()
optimizer.step()
train_loss[epoch] += loss.cpu().item()
if((batch_idx+1) % 100 == 0):
print("epoch : {0} | #batch : {1} | batch average loss: {2}"
.format(epoch, batch_idx, loss.cpu().item()/len(data)))
# train_loss[epoch] /= len(dataIter.dataset)
print("Epoch : {0} | epoch average loss : {1}"
.format(epoch, train_loss[epoch] / len(dataIter.dataset)))定义模型并训练
encoder_structure = [784, 512, 64]
decoder_structure = [20, 64, 512, 784]
model = VAE(encoder_structure, decoder_structure, 20)
opt = torch.optim.Adam(model.parameters(), lr=1e-3)
print(model)
model.train(model, dataIter, nn.MSELoss(size_average=False), opt, 50)随机采样几个编码,并生成样本
shape = (6, 20)
z_mean = torch.rand(shape, device='cuda')
rand_z = torch.randn(shape,device='cuda') + z_mean
gen_x = model.decode(rand_z).cpu()
rand_img = to_image(gen_x).detach().numpy()
# rand_img = (rand_img * 255 / (rand_img.max() - rand_img.min())).astype(np.uint8)
_ ,axes = plt.subplots(2, 3)
for i in range(2):
for j in range(3):
axes[i][j].imshow(rand_img[i*3+j], cmap='gray')
plt.show()