学习笔记:点云库PCL(Point Cloud Library )介绍
本文简要介绍点云库(PCL),一个用于处理2D和3D数据的开源库,如激光雷达点云。 通过熟悉使用PCL的一些基础知识,以便后续使用PCL进行定位。主要涵盖以下内容:
点云数据Point Cloud Data(PCD)文件
点云库The Point Cloud Library(PCL)
PCL查看器(Viewer)
在PCL中创建和使用激光雷达对象
模板Templates和不同的点云
调整激光雷达参数 检查PCL中的点云
一、点云数据(PCD)文件
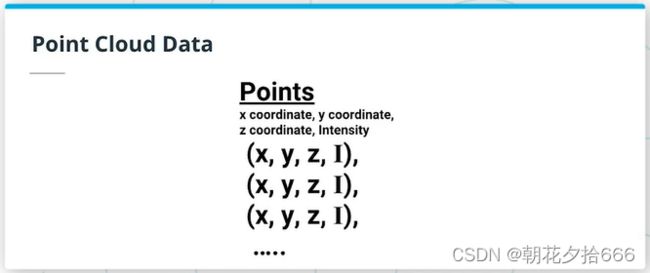
激光雷达数据的存储格式称为点云数据(PCD),pcd文件是笛卡尔坐标(x,y,z)和强度值i的列表,是在每一次扫描环境之后的单个快照。这意味着对于VLP 64激光雷达,pcd文件将有大约256,000 (x,y,z,i)值。
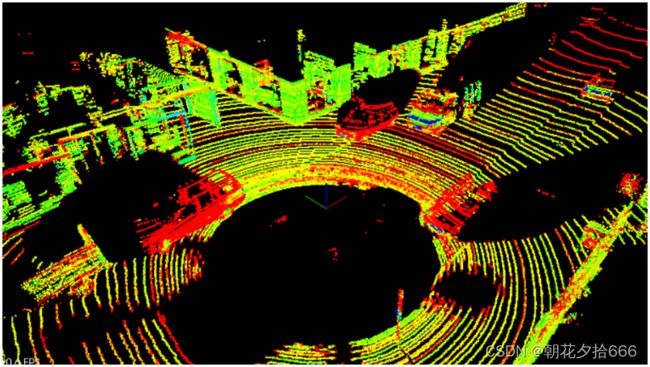
一个城市街区的PCD,停着的汽车,和一辆路过的货车。强度值以不同的颜色显示。中间黑色区域是装有激光雷达传感器的汽车所在的位置。
PCD坐标
点云数据的坐标系与汽车的本地坐标系相同。在这个坐标系中,x轴指向汽车的前部,y轴指向汽车的左侧。由于这个坐标系采用右手定则,坐标系z轴指向汽车上方。

二、点云库PCL
在本课中学习处理点云数据以发现障碍物。所有的代码都将在c++环境中完成,PCL是一个用于处理点云的开源c++库,使用它来可视化数据、呈现形状,以及一些内置处理功能。在这里可以找到PCL的一些文档:Point Cloud Library | The Point Cloud Library (PCL) is a standalone, large scale, open project for 2D/3D image and point cloud processing.

PCL在机器人社区中被广泛用于处理点云数据,网上有许多使用它的教程。PCL中有许多内置函数可以帮助检测障碍,如分割、提取和聚类。
三、启动代码
所有代码(以及关于障碍物检测方面的内容)都包含在GitHub存储库中,可以克隆repo,并参照README在电脑上运行。参考链接:GitHub - udacity/SFND_Lidar_Obstacle_Detection。 主要包含两个主文件,即environment.cpp和processPointClouds.cpp。environment.cpp文件包含主函数,生成可运行的执行文件。processPointClouds.cpp文件包含用于处理pcd的所有函数的占位符。 另外还有sensors/lidar.h,用于模拟激光雷达感知并创建点云数据;render.cpp和render.h,它们有将对象渲染到屏幕上的功能。
代码结构
顶层:CMakeLists.txt
Readme
src /
render/
box.h -盒子对象的结构定义
render.h
render.cpp -这个文件和头文件一起定义了渲染对象的类和方法。
sensors/
data / -该目录包含本文使用的PCD数据。
lidar.h -具有使用射线创建pcd的功能。
environment.cpp -主文件:使用PCL查看器,处理和可视化pcd。
processPointClouds.h
processPointClouds.cpp -用于过滤、分段、集群、装箱、加载和保存pcd的函数。
四、编译激光雷达模拟器
在Ubuntu环境(Ubuntu 16.04)下编译指引
-
克隆github repo-https://github.com/udacity/SFND_Lidar_Obstacle_Detection :
cd ~ git clone https://github.com/udacity/SFND_Lidar_Obstacle_Detection.git
-
编辑CMakeLists.txt如下:
cmake_minimum_required(VERSION 2.8 FATAL_ERROR)
add_definitions(-std=c++14)
set(CXX_FLAGS "-Wall")
set(CMAKE_CXX_FLAGS, "${CXX_FLAGS}")
project(playback)
find_package(PCL 1.11 REQUIRED)
include_directories(${PCL_INCLUDE_DIRS})
link_directories(${PCL_LIBRARY_DIRS})
add_definitions(${PCL_DEFINITIONS})
list(REMOVE_ITEM PCL_LIBRARIES "vtkproj4")
add_executable (environment src/environment.cpp src/render/render.cpp src/processPointClouds.cpp)
target_link_libraries (environment ${PCL_LIBRARIES})
3.在终端中执行以下命令
sudo apt install libpcl-dev cd ~/SFND_Lidar_Obstacle_Detection mkdir build && cd build cmake .. make ./environment
执行./environment,看到一个弹出的窗口,图片如下:

一个简单的高速公路模拟环境,中间车道上的车是绿色的(可自定义的车),其他交通车辆是蓝色的。所有内容都使用带有简单框、线条和颜色的PCL进行呈现。可以使用鼠标在环境中移动,试着按住鼠标左键绕着场景旋转,按住鼠标中键移动场景;若要缩放,移动时使用鼠标中滚动键或鼠标右键。
五、PCL查看器
在environment.cpp中创建了一个pcl查看器,查看器用于处理屏幕上所有对象的可视化。在environment.cpp中使用pcl查看器的函数是initCamera和initHighway,initCamera函数用于在窗口中设置不同的观察角度,有5种不同的选择:XY, TopDown, Side和FPS---XY提供45度视角,FPS则是第一人称视角,给人一种坐在汽车驾驶座上的感觉。 此外,渲染函数也大量使用了查看器,注意viewer通常作为引用传入。这样,流程就更精简了,因为不需要返回任何东西。
六、创建激光雷达对象
lidar对象由src/sensors/lidar.h的头文件定义,包含在environment.cpp的顶部。environment.cpp中还有一个simpleHighway函数,用于接受PCL可视化器查看器的引用参数。
在simpleHighway函数中实例化一个指向Lidar对象的指针。使用new关键字在堆上创建Lidar指针对象。Lidar构造函数有两个参数:汽车和地面的坡度——这些参数对于光线碰撞建模是必要的。创建的Lidar对象的斜率应为0。
请注意
激光雷达参数对建模射线碰撞是必要的。激光雷达对象将保存点云数据,容量可能非常大。通过在堆上实例化,我们可以使用比堆栈上2MB更多的内存。但是,在堆上查找对象需要更长的时间,而堆栈查找非常快。
在environment.cpp,simpleHighway函数中:
/ TODO: Create lidar sensor
Lidar* lidar = new Lidar(cars, 0);
七、使用激光雷达对象
要进一步使用新创建的Lidar对象,请查看src/sensors/ Lidar .h,查看所有内容是如何定义的。在这个头文件中,射线对象被定义。激光雷达将利用这些射线,进行射线投射来感知周围的环境。Lidar结构内的扫描函数执行射线投射。
现在调用Lidar扫描函数,看看激光雷达射线是什么样子的。回到environment文件中,在调用Lidar构造函数之后,可以使用scan函数,呈现激光雷达射线。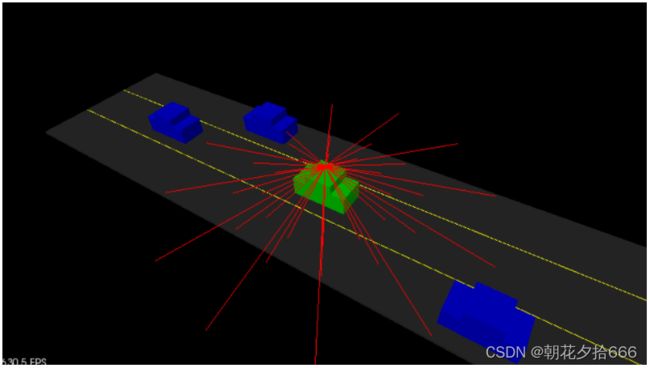
激光雷达传感
要创建点云,请在lidar对象上调用lidar scan()方法。
结果存储在一个PointCloud指针对象中,pcl::PointCloud
PointCloud的点类型将是pcl::PointXYZ。
使用生成的PointCloud指针调用renderRays函数。
请注意
PointCloud的模板语法类似于向量或其他标准容器库的语法: ContainerName
来自PointCloud的Ptr类型表明对象实际上是一个指针—一个包含点云对象的内存地址的32位整数。pcl中的许多函数使用点云指针作为参数,因此以这种形式返回inputCloud很方便。
renderRays函数在src/render中定义。它包含允许向pcl查看器呈现点和形状的函数。在查看器使用它来渲染激光雷达射线作为线段。
renderRays函数的参数是viewer,通过引用传入。这意味着renderRays函数体中对查看器的任何更改,都会直接影响函数范围外的查看器。激光雷达的位置也得到传递,以及扫描函数生成的点云。PointCloud的点类型将是pcl::PointXYZ。我们还会讲到一些其他不同类型的点云。
在environment.cpp中,在simpleHighway函数中,在前面的lidar对象实例化之后再添加两行:
// TODO: Create lidar sensor
Lidar* lidar = new Lidar(cars, 0);
pcl::PointCloud::Ptr inputCloud = lidar->scan();
renderRays(viewer, lidar->position, inputCloud); 八、模板以及不同的点云数据
为什么使用模板?
之前使用的激光雷达扫描函数产生了一个带有pcl::PointXYZ点的pcl PointCloud对象。对象使用模板是因为有许多不同类型的点云:一些是3D的,一些是2D的,一些包括颜色和强度。这里使用的是普通的3D点云,所以使用了PointXYZ。然而,也有一些点具有强度分量。 模板可以自动完成这个过程,而不是定义两个单独的函数,一个带有PointXYZ的参数,另一个带有PointXYZI的参数。对于模板,只需要编写一次函数,并像使用参数一样使用模板来指定点类型。
模板和指针
如果您以前没有使用过带有指针的模板,那么您可能在代码中注意到,每当使用依赖于模板的指针时,都会使用typename。例如这里的函数签名:
typename pcl::PointCloud::Ptr ProcessPointClouds::FilterCloud(typename pcl::PointCloud::Ptr cloud, float filterRes, Eigen::Vector4f minPoint, Eigen::Vector4f maxPoint) 这样做的原因如下:给定一段带有类型名参数的代码,如pcl::PointCloud
九、调整激光雷达参数
你可以围绕场景旋转和移动,以看到投射出来的不同光线。然而,当前的激光雷达设置会限制你的操作。分辨率很低,从场景中看到,只有一条射线接触到一辆汽车。所以提高激光雷达的分辨率,就能清楚地看到周围的其他车辆。
包括增加最小距离,就不会把与车顶的接触点包括在内;以及提高水平和垂直角度的分辨率和添加噪音。添加的噪声实际上是相当高的,因为单位是米,但会产生更有趣和更真实的点数据在场景中。可以完全自由地试验和调整这些激光雷达超参数!
通过增加垂直层数和z轴周围的角度分辨率来提高激光雷达的分辨率。
numLayers:从3改为8。
horizontalLayerIncrement:从pi/6改变为pi/64。
将minDistance(最小距离)设置为5(米),以移除车顶上的点。
添加噪音,0.2左右可以得到更有趣的pcd。
完成以上设置后,输出如下图所示:

提高激光雷达范围
十、检测点云
现在可以看到激光雷达射线的样子了,那么将要使用和处理的实际点云数据呢?其实,可以在渲染中使用renderPointCloud函数查看点云数据,也可以选择关闭高速公路场景的渲染,这样就可以看到点云本身的样子。
上图中的结果是无噪声的,激光雷达minDistance设置为零。当加大激光雷达minDistance,可以移除上面击中车顶的点,因为这些点不能帮助探测其他车辆。此外,一些噪声方差有助于创建更有趣的点云,添加噪声将帮助开发更健壮的点处理功能。
要做到以上效果,在simpleHighway函数中调用renderPointCloud而不是renderRays。
通过在environment.cpp中将renderScene设置为false,可以无障碍地查看点云。
完成后,输出应该如下图所示: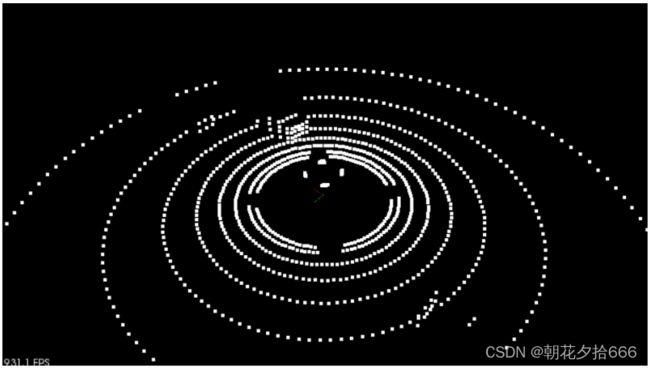
模拟PCD
在environment.cpp中,在simpleHighway中,删除之前的renderRays调用,取而代之的是使用renderPointCloud:
Lidar* lidar = new Lidar(cars, 0);
pcl::PointCloud::Ptr inputCloud = lidar->scan();
//renderRays(viewer, lidar->position, inputCloud);
renderPointCloud(viewer, inputCloud, "inputCloud"); // You can also use other names than just "inputCloud" 另外,在函数中,修改renderScene来隐藏对象边界:
// RENDER OPTIONS
bool renderScene = false;十一、总结
通过本文,了解了以下内容:
点云数据(PCD)文件
点云库(PCL)
PCL查看器
在PCL中创建和使用激光雷达对象
模板以及不同的点云
调整激光雷达参数
检测PCL中的点云