李宏毅老师《机器学习》课程笔记-2.1模型训练技巧
注:本文是我学习李宏毅老师《机器学习》课程 2021/2022 的笔记(课程网站 ),文中图片除了两幅是我自己绘制外,其余图片均来自课程 PPT。欢迎交流和多多指教,谢谢!
文章目录
-
- Lecture 2 What to do if my network fails to train
-
- 1. 模型性能的分析思路
-
- (1)先看 training loss
- (2)如果 training loss 小,再看 testing loss
- (3)如何挑选模型?validation set 的作用
- 2. gradient 接近 0,应对办法: batch; momentum
-
- (1)gradient 接近 0 ,不一定是 local minima
- (2)small batch v.s. large batch
- (3)momentum
- 3. loss 不下降,gradient 却不小,应对办法:adaptive learning rate
-
- (1)Adagrad
- (2)RMSProp
- (3)Adam
- (4)Learning Rate Scheduling
- 4. 改变 error surface
- 听课收获
- 参考
Lecture 2 What to do if my network fails to train
1. 模型性能的分析思路
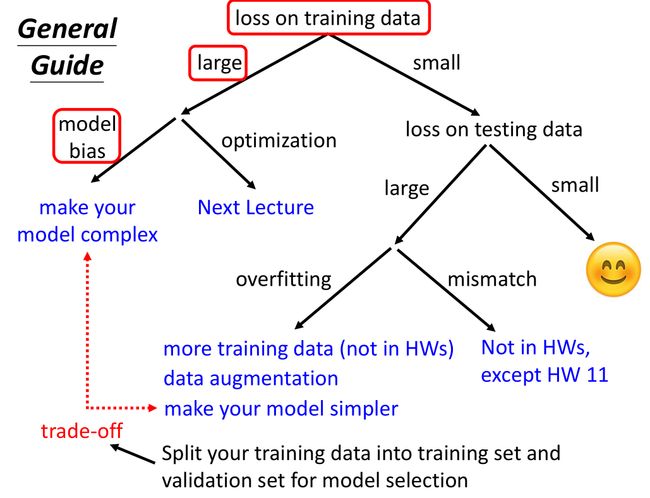
下面的这个树型图写得很详细,按照先看 training loss,再看 testing loss 的步骤,逐个解决 loss 大的问题,直到 training loss 和 testing loss 都小。
按照这个思路,我根据自己的理解,绘制了下面两幅图来分析。
(1)先看 training loss
如果 training loss 大,testing loss 也不会小。为什么?有参考答案的 training data 都没学习好,何况 testing data 是新的数据。
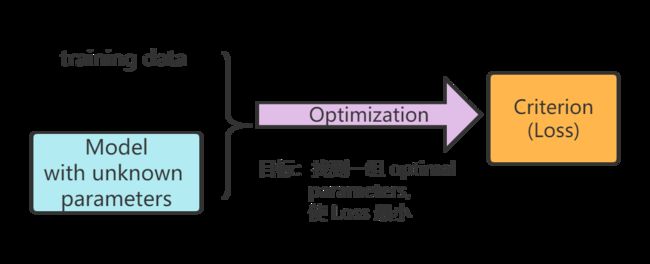
如下图所示,在前一课讲到,在训练中关键的三要素就是:模型 ( Model )、评价标准 ( Loss function )、优化算法 ( Optimization )。对于给定的 training data,如果 training loss 大,就要在 Model 和 Optimization 上找原因,要么是 model bias,要么是 optimization issue。
具体来说:
model bias 指的是模型太简单了,即使是参数集中最小的 loss 都不符合要求(超出了模型的能力范围)。就像在没有针的干草堆里找针,白费功夫。解决办法:增加模型复杂度,比如增加特征,比如增加神经网络的层数。
optimization issue 指的是存在最优参数,但模型没找到。就像在大的干草堆里找针,针是在里面,但是怎么也找不到。解决办法:改进优化策略。本节课剩余内容主要介绍这方面的方法。
启发:之前我以为 training loss 大,就是 model bias,没想到还有一个 optimization 的问题。那么,我们应该如何分辨呢?
对比。可以选一个简单的模型做对比,简单的模型更容易求到优化参数。(这可能也是 baseline 的作用。)如果复杂模型还不如简单模型的性能,那就说明复杂模型没优化好。为什么呢?比如说,用一个 5 层的神经网络,训练出来的 training loss 比用 4 层的神经网络训练的 loss 还要大,就是存在 optimization issue。因为这个 5 层的神经网络,如果最后一层不做任何处理,保持原样输出,就和 4 层的神经网络等效。也就是说,5 层的神经网络起码能达到 4 层神经网络的 loss(有这个能力),现在反而比 4 层的神经网络的 loss 更大,说明没有找到参数最优值(能力没有完全发挥)。
(2)如果 training loss 小,再看 testing loss
如果 testing loss 小,说明模型性能好,万事大吉!
如果 testing loss 大,如下图所示,我们就要从 Model 和 testing data 上找原因。要么是 overfitting,要么是 data mismatch。

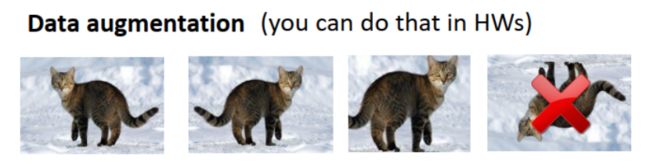
overfitting 和 model bias 正相反,model bias 是模型太简单了,overfitting 则是模型太复杂了。overfitting 时,模型对训练集是拟合得好(training loss 小),但是把训练集的细节和噪声也学进去了,得到错误的规律,导致在新数据 ( 如:testing data ) 上表现不佳。解决方法:A. 多收集一些数据。B. 或者做数据扩增 ( data augmentation ),比如把一张图片左右反转得到的图片,如下图所示。C. 或者简化模型,比如做正则化 ( regularization )。
data mismatch 指训练集和测试集数据分布不一致,比如分别是彩色图片和黑白手绘图。需要关注数据的产生(采样)方式。
(3)如何挑选模型?validation set 的作用
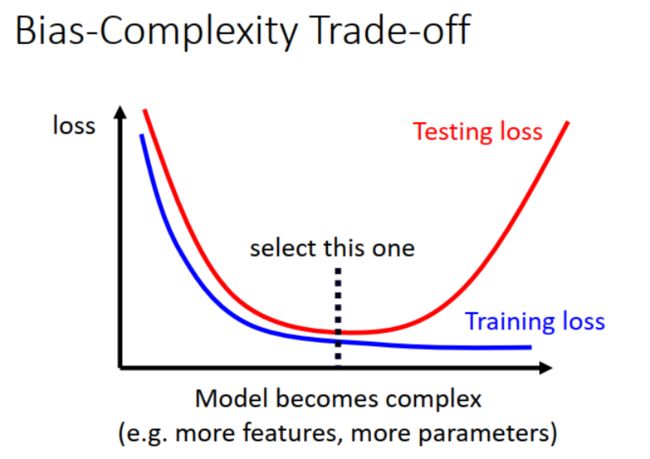
综合上面的分析,我们发现,随着模型复杂度增大, training loss 会逐渐减小至最低,而 testing loss 则会先减小,然后又开始增大。最好能找到中间合适的复杂度,让模型的效果最好,如下图所示:
那么,我们要怎么找到这个合适的复杂度呢?
一个直觉的想法就是训练几个 不同复杂度的模型,看它们在 testing data 的表现,从中选择最好的一个。例如,在 Kaggle 等竞赛平台上,上传结果就可以在 public leaderboard 看到分数。训练几个不同复杂度的模型,把它们在 testing data 的预测结果 y ^ \hat{y} y^ 分别上传,从中选择 public leaderboard 分数最好的那一个模型结果作为最终结果。
然而, private leaderboard 一出来,掉榜了!和 public leaderboard 的分数相差挺大,怎么回事?
什么是 public leaderboard 和 private leaderboard?
Kaggle 对 testing data 做了划分(怎么划分的不会告诉你),一部分用作 public leaderboard,提交结果即反馈分数;一部分用作 private leaderboard,比赛结束后才会公布分数。
如果用 public leaderboard 的结果来选模型,无形中就是在学习 public testing set 的信息:哪一种模型在 public testing set 上表现好,我就选哪个。所以,用 private testing set(真正的未知数据)测试,模型的表现不如预期。
这也解释了为什么在公开数据集上,机器在一些任务上(如语音识别)甚至比人类都做得更好。(“This explains why machine usually beats human on benchmark corpora.”) 因为可以根据 public testing set 的结果对模型做调整优化。那么,应用到实际中各种新情况呢,也优于人类吗?
要想让 testing data 反映真实的未知数据,即 public leaderboard 和 private leaderboard 的分数接近,就 不能在模型训练中用 testing data,不只是参数优化时,也包括模型选择时。我觉得,模型选择是指对 同一种类型 的模型,选择不同的复杂度进行比较,确定最佳复杂度。例如,比较神经网络的不同层数。换言之,就是要避免 model bias 或 over fitting。这是我的理解,如果有不对之处,请您多多指教,谢谢!
不能在模型训练中使用 testing data,那要怎么做呢?
把 training data 再划分为 training set 和 validation set,用 validation set 来挑选模型。然后在挑选的模型上运行,把结果上传到 public leaderboard。这样,public leaderboard 的结果就会和 private leaderboard 更为接近。重要的一点是,尽量不要根据 public leaderboard 的结果去调整模型。
万一没划分好,validation set 不好,会影响模型选择啊,怎么办?
采用 N-fold Cross Validation:把数据集划分成 N 份,每次用 N-1 份做 training set,1 份做 validation set。依次做 N 次训练,这样每份数据都有一次作为 validation set。最后取 N 次训练的均值作为模型训练结果,这下不用担心数据集没划分好了。
2. gradient 接近 0,应对办法: batch; momentum
(1)gradient 接近 0 ,不一定是 local minima
gradient 很小,接近 0,是不是 local minima?
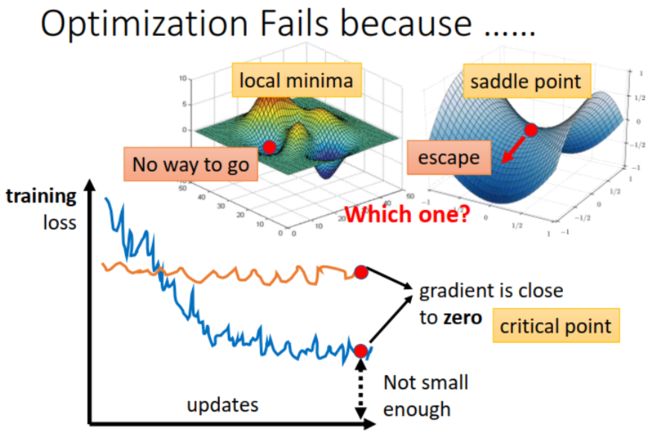
不一定哦,还有可能是 saddle point。这两种 gradient is close to 0 的情况统称为 critical point,如下图所示。
local minima 和 saddle point 有什么不同?
如果到了 local minima,环顾四周,loss 已经是低点,没法下降了,无路可走。而 saddle point 不同,还有路可走。
把 L ( θ ) L(\theta) L(θ) 用泰勒级数展开,如下图所示,Gradient 是一阶导数,Hessian 是二阶导数 。
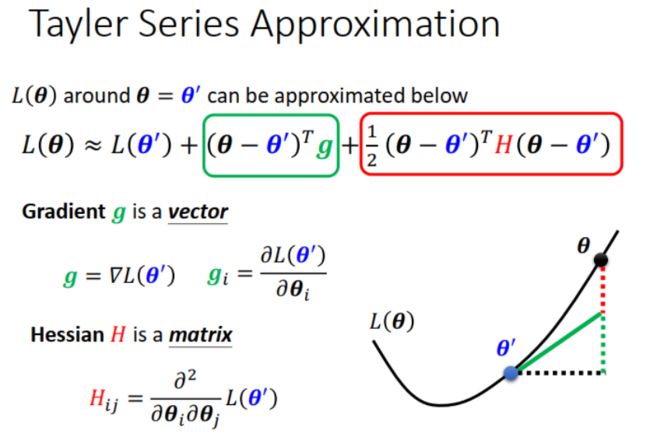
当 Gradient 接近 0 时,一阶导数项为 0, L ( θ ) L(\theta) L(θ) 可简化为下图所示的表达式,只需看 Hessian 项。可以通过 H 矩阵的 eigen value(特征值),来判断当前的 critical point 属于哪种情况。

怎样走出 saddle point ?
如下图所示,计算 H 矩阵的 eigen values,找到 eigen value < 0 对应的 eigen vector u u u,从而得到参数更新方向 θ = θ ′ + u \theta =\theta'+u θ=θ′+u,这样 loss 可以继续下降。

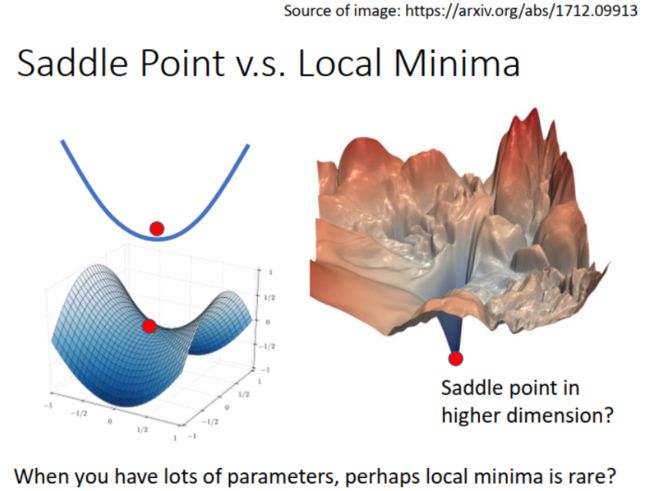
以为到了 local minima,其实不一定:
如下图中左边两幅图所示,在低维看: local minima (高维的一个截面),在高维看:saddle point。低维看觉得无路而走,高维看发现还有路,还可以下降。当模型有很多参数时,维数高,critical point 是 saddle point 的可能性远大于 local minima。因此,很多时候,遇到 critical point,我们以为到了 local minima,其实不然,换条路,loss 还可以继续下降。
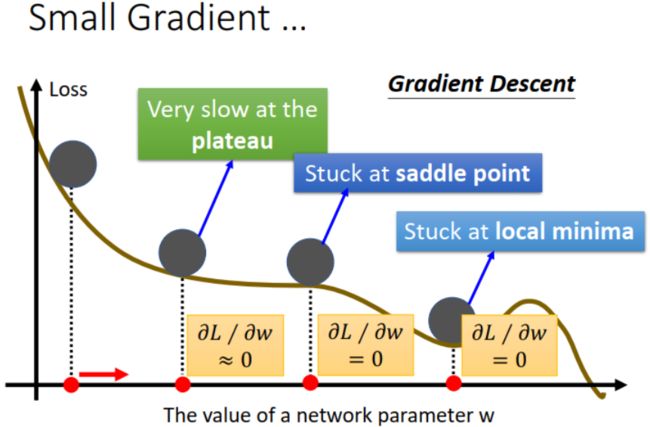
下图中就是我们可能遇到的 gradient 接近 0,loss 不再下降、训练卡住的情况,包括 local minima, saddle point, 或者 loss 曲线十分平缓的情况。实际中一般不会使用前面介绍的计算 Hessian 矩阵和 eigen vector 的方法,运算量太大。那么,遇到 small gradient 怎么办?方法: 提前设置 batch size 和 momentum。接下来依次介绍这两种方法。
(2)small batch v.s. large batch
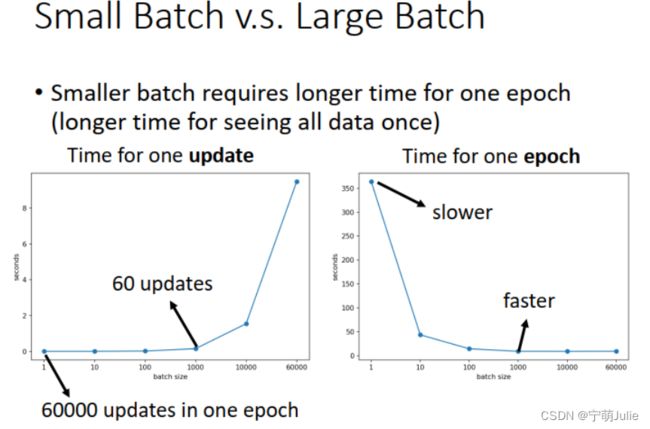
误解一:small batch 更快。
实际上,如果用上 GPU,采用并行计算 ( parallel computing ),large batch 和 small batch 在 1 个 update 的用时差不多。在 1 个 epoch 中,small batch 需要 update 的次数更多,因此耗时更长,如下图所示。
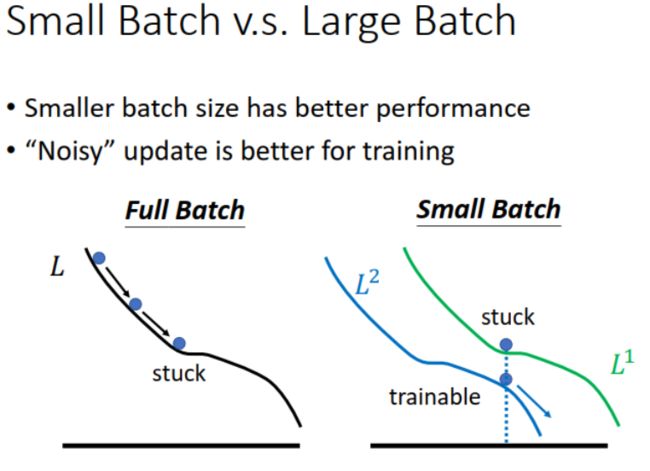
误解二:large batch 用的训练数据更多,看得全面,性能会更好。
实际上,small batch 训练时不容易卡住:small batch 没有使用所有的训练数据来更新参数,看起来更加 noisy,其实可以避免卡在 critical point。用某个 batch 计算得到的 gradient 接近 0,换一个 batch 计算时,loss 有变化,可能 gradient 就变大了,如下图所示,因此可以继续训练。
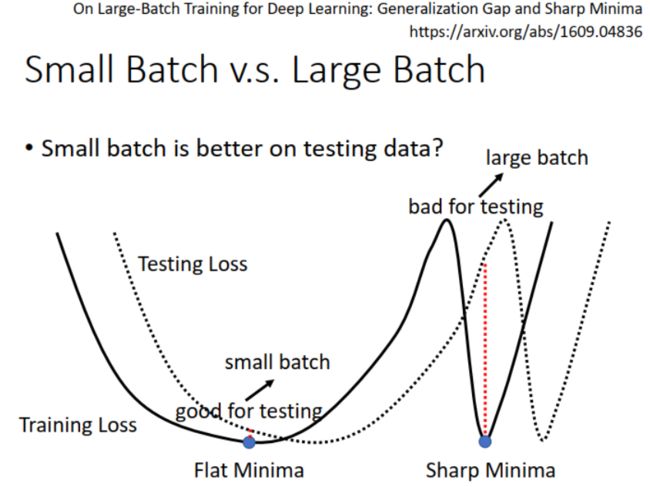
此外,small batch 在 testing set 上的表现更好:一种解释是 small batch 的 local minima 容易是“盆地”形状,而 large batch 的 local minima 容易是“峡谷”形状。如下图所示,当 testing loss 曲线较 training loss 曲线稍有偏移时,采用 small batch 训练得到的模型能够应对,loss 变化不大,而采用 large batch 训练得到的模型,loss 可能就一下子从谷值到峰值,波动很大。
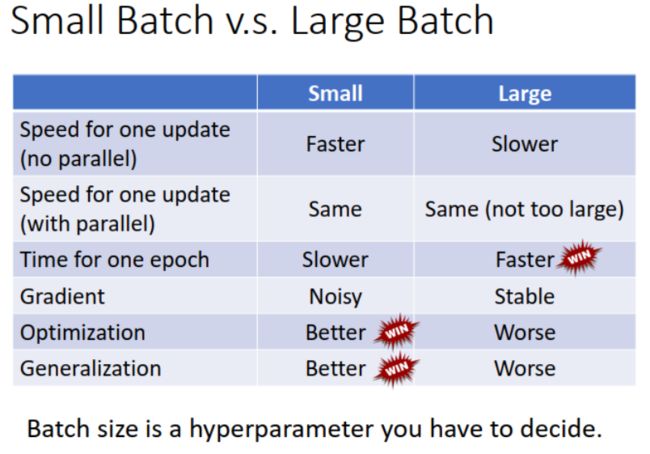
我原以为 small batch 和 large batch 之间的取舍在于是要 small batch 的快,还是要 large batch 的性能。让我完全没想到的是,实际要考虑的是要 small batch 的性能,还是 large batch 的速度,和我设想的正好相反。具体对比如下表所示:
(3)momentum
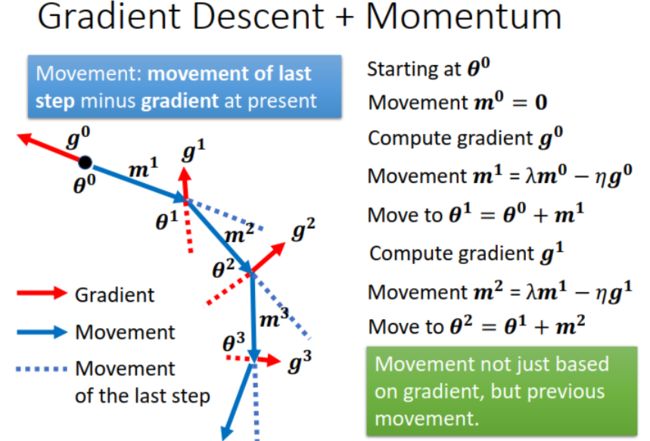
momentum 的思想来源于物理的动量,比如一个小球在斜坡上滚动,遇到小坑(类比:gradient 接近 0 的时候),不会立即停下,而是靠惯性继续前进,从而走出小坑。momentum 综合考虑前一次 update 的 movement 和本次 update 的 gradient。遇到 gradient 接近 0 时,可以凭借之前的动量继续前进,训练不会卡住。
应用 momentum,每一次参数的变化 ( movement ) 不仅与 gradient 有关,还与上一次的变化 ( movement of last step ) 有关,也就是与之前的变化有关。如下图所示:
3. loss 不下降,gradient 却不小,应对办法:adaptive learning rate
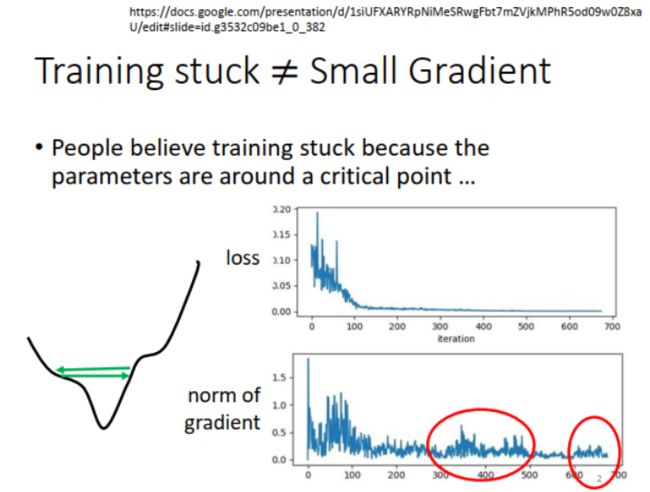
训练卡住,loss 不下降,就是到了 critical point 吗?
不一定。可能此时 gradient 并不小。如下图中红色圆圈所示,loss 不再下降,然而 gradient 却一直在波动。
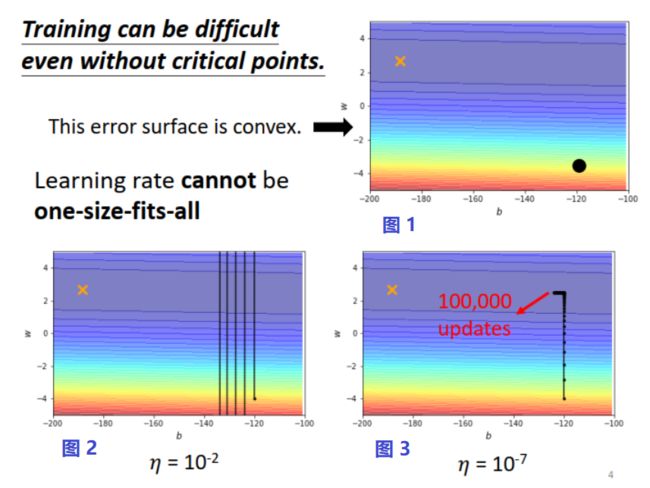
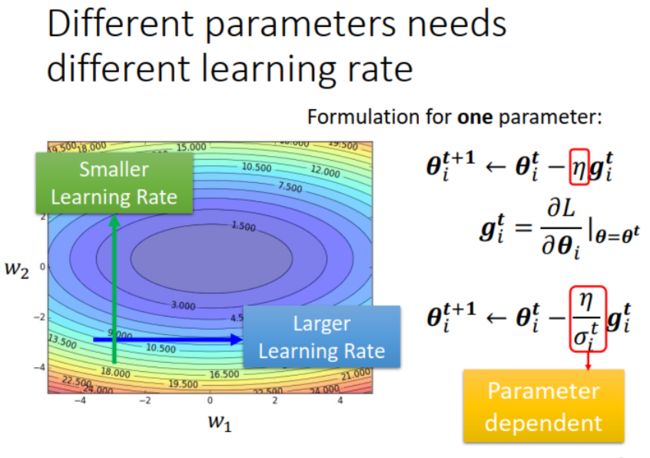
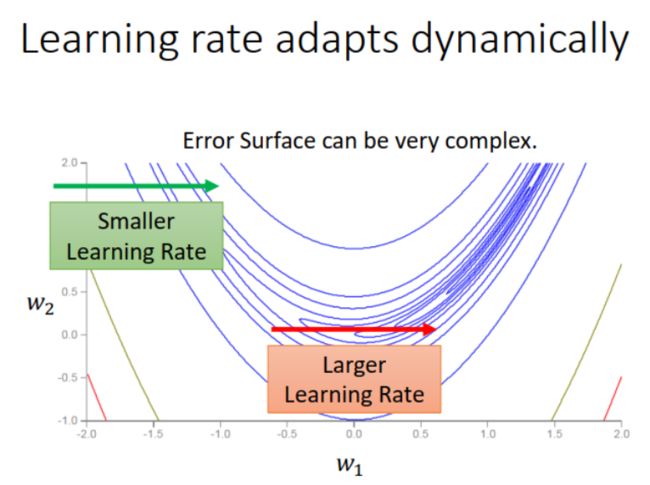
是什么原因?来看一个具体的例子。下图所示为有两个参数模型的 convex error surface,是理想的 error surface,存在 loss 最小值(图中打叉点所示)。参数 w w w(纵轴)的 loss 曲线陡峭,而参数 b b b(横轴)的 loss 曲线平缓。假设参数优化的起始点在下图 1 中黑点所示位置,如果 learning rate 设大一些,纵轴方向调整时,在“山谷两侧陡峭的崖壁”来回震荡,如下图 2 所示;如果 learning rate 设小一些,横轴方向调整时,在“平缓的盆地”进展缓慢,如下图 3 所示。可见一个 learning rate 难以满足不同参数的调整步子 ( step ) 要求。
解决办法:引入 σ i t \sigma_i^t σit ,与参数 i i i 和更新次数 t t t 都有关,让不同的参数有不同的 learning rate。
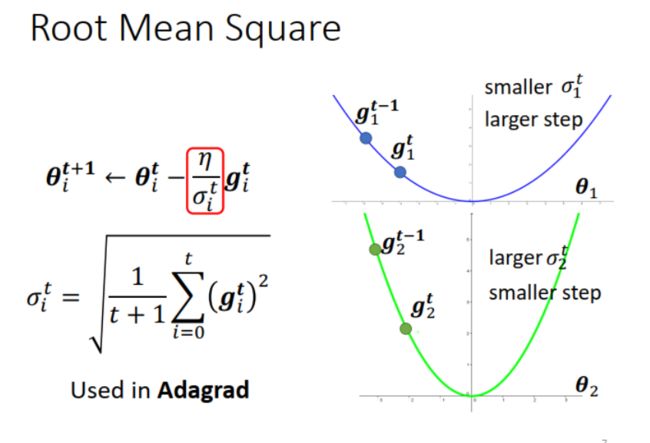
(1)Adagrad
Adagrad: σ i t \sigma_i^t σit 取本次和以前的 gradients 的 Root Mean square。如下图所示,某个参数 θ 1 \theta_1 θ1的 gradient 小,loss 曲线平缓,那么 σ 1 t \sigma_1^t σ1t 小,step 大;反之,某个参数 θ 2 \theta_2 θ2 的 gradient 大,loss 曲线陡峭,那么 σ 2 t \sigma_2^t σ2t 大,step 小。
疑问: σ i t \sigma_i^t σit 如果与参数有关的话, σ t \sigma^t σt 是个标量还是矢量?如果是标量,那么是计算各参数的 σ i t \sigma_i^t σit 之和?
我在李沐老师的《动手学深度学习》AdaGrad一节 找到了答案,不同的参数,通过计算其 g i t g_i^t git 得到对应的 σ i t \sigma_i^t σit。例如,对于 loss function 为 f ( x ) = 0.1 x 1 2 + 2 x 2 2 f(x)=0.1x_1^2+2x_2^2 f(x)=0.1x12+2x22 ,书中的示例代码为:
def adagrad_2d(x1, x2, s1, s2):
g1, g2, eps = 0.2 * x1, 4 * x2, 1e-6 # 前两项为自变量梯度
s1 += g1 ** 2
s2 += g2 ** 2
x1 -= eta / math.sqrt(s1 + eps) * g1
x2 -= eta / math.sqrt(s2 + eps) * g2
return x1, x2, s1, s2
可以看到,代码中的 s 1 s_1 s1 和 s 2 s_2 s2 分别是 g1 的平方累积和 g2 的平方累积,而 σ 1 t \sigma_1^t σ1t 和 σ 2 t \sigma_2^t σ2t 分别对应代码中的 s 1 \sqrt{s1} s1 和 s 2 \sqrt{s2} s2。也就是说,不同的参数有不同的 σ i t \sigma_i^t σit,因此有不同的 learning rate。同时也注意到,g 的取值是有正有负,标识了变化方向。而 σ 1 t \sigma_1^t σ1t 取值均为非负值,标识大小。
Adagrad 存在的问题: σ i t \sigma_i^t σit 是 gradient 的累积平均,对 gradient 的变化反应不够快。如下图中的参数 w 1 w_1 w1,绿色箭头处 loss 曲线陡峭,gradient 大,需要 smaller step;而到了红色箭头处 loss 曲线平缓,gradient 小,要 larger step。怎么才能更快地应对 gradient 变化呢?
解决办法:引入 weight,加大本次 gradient 的权重。这就是 RMSProp。
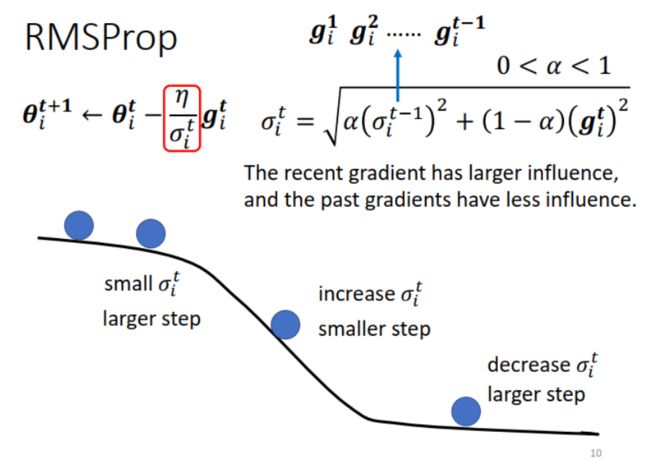
(2)RMSProp
RMSProp: σ i t \sigma_i^t σit 取本次和以前 gradients 的 weighted Root Mean Square。通过调整 α \alpha α ,可以决定当前 gradient 的影响力,从而对 gradient 的变化反应更快。例如遇到下图所示的 loss 曲线先平缓、再陡峭、又平缓的情况,如果用 Adagrad,因为计算的是本次和历史 gradients 的平均,反应慢,很容易在中间陡峭段因为 step 大“飞出去”。而用 RMSProp,可以给 α \alpha α 设置一个较小的值,从而使当前 gradient 的作用大,在陡峭段 σ i t \sigma_i^t σit 会快速变大,从而调小 step。到了下一个平缓段, σ i t \sigma_i^t σit 又会快速变小,从而调大 step。
(3)Adam
Adam:RMSProp+Momentum
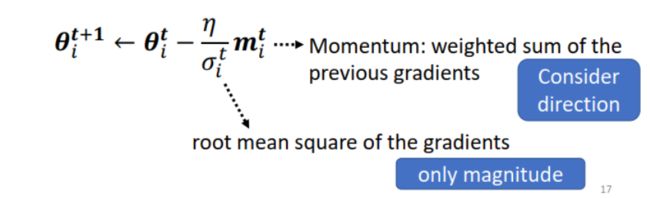
疑问:分子分母都是计算的累积 gradients,会不会抵消呢?
不会。momentum 是向量,既有大小、又有方向。RMSProp 是标量,只是计算大小。
(4)Learning Rate Scheduling
前面例子的两参数模型,应用 Adagrad 之后,优化过程如下图所示,接近终点处为什么会在纵轴来回摆动呢?
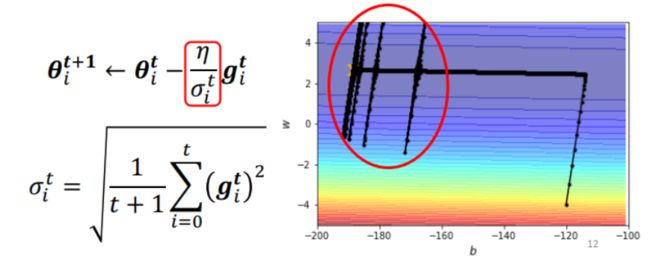
原因:此时,纵轴方向 ( w w w) 的 gradient 很小,经过一段时间累积平均, σ w t \sigma_w^t σwt 变得很小,于是 step 变大, w w w 这一步的变化就“飞出来”了,到纵轴方向 gradient 大的地方。同时由于 step 大,和前面介绍的 learning rate 大的情况一样,在“山谷两侧的崖壁”来回震荡。但是,过一段时间, σ w t \sigma_w^t σwt 也会逐渐变大,因此 step 变小, w w w 又会变化调整回到中心。
看来,应该让 learning rate 本身也变化,开始大一点,到训练后期(接近 loss 低值),就要小。这就是 Learning Rate Scheduling,如下图所示。应用这一方法后, w w w 的变化就不会“飞出”,而是顺利到达最优点。
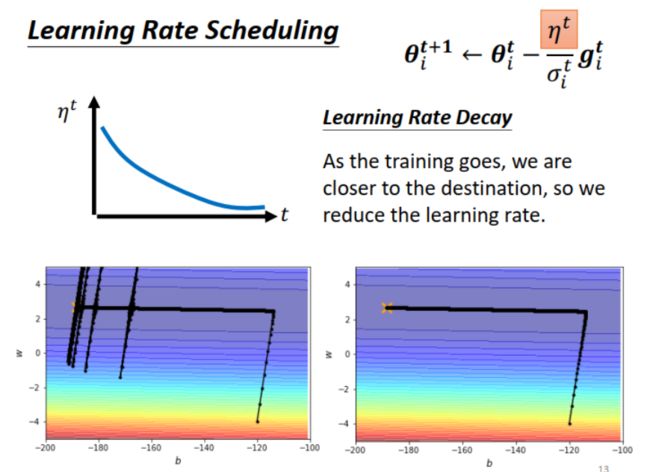
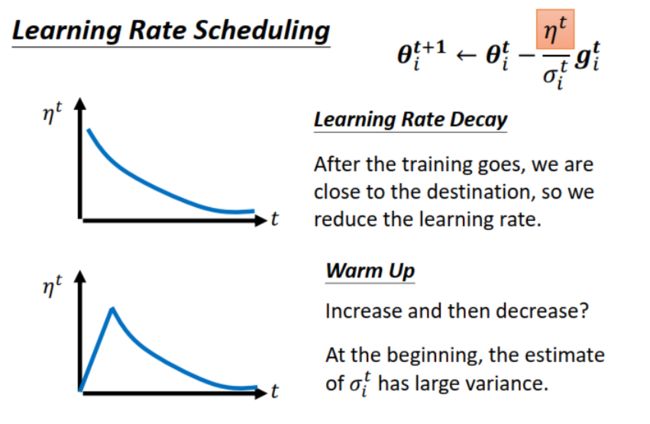
有两种 Learning Rate Scheduling:
learning rate decay:learning rate 的变化: 大–>小
warm up:learning rate 的变化:小–>大–>小。这个名字取得很有意思,好像 learning rate 也要热身,哈哈。warm up 是许多知名模型(例如 ResNet,Transformer)都会使用的一个训练技巧。为什么初始 learning rate 先不设大?一个解释是 σ i t \sigma_i^t σit 是历史 gradients 的统计值,一开始时计算的次数少,可能并不准确,所以一开始步子不宜迈大,先小步探索。
结合 2 和 3,综合应用 momentum 和 adaptive learning rate:

4. 改变 error surface
从分类问题说起:
如何做分类 ( classification ) ?
首先想到的方法是把类别用数字表示,例如,输出按类别表示为 1,2,3,……,这样转化为一个回归问题 ( regression ) 。
但是这样做有一个问题:不同类别并不一定有大小、顺序关系,比如颜色红、黄、蓝,如果按数字来定类别,就人为设置了相邻的两个类别更接近,这不符合事实,容易造成误判。
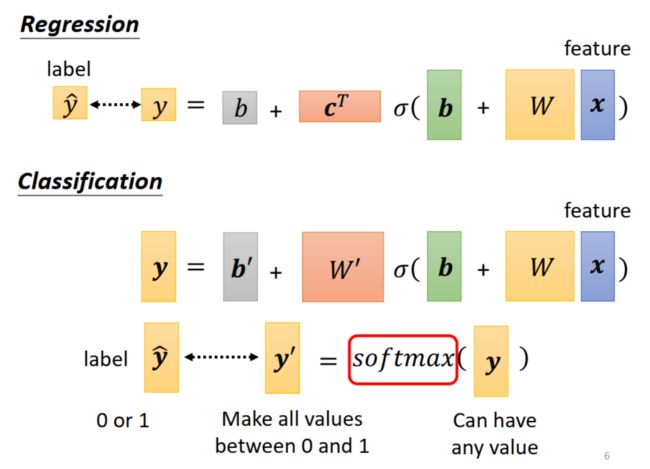
解决办法:使用 one-hot vector,如下图右上角所示,对应类别处值为 1 ,其余地方值为 0。这样,原来 1 个输出变成多个输出。在神经网络中的实现也简单,如下图所示,在输出部分增加几个线性单元即可。
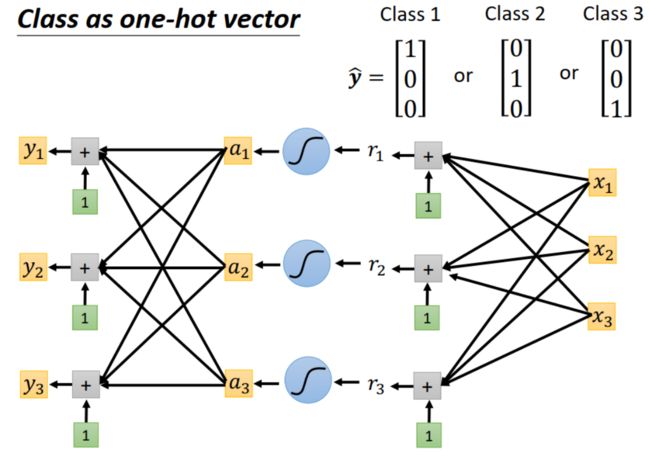
进一步地,因为 one-hot vector 的值都是 0 或者 1,用 softmax 把输出值限制到 [0,1] 之间,好和 one-hot vector 计算相似度。
对于两分类问题,用 sigmoid 与 softmax 等效。

loss function 还是和 regression 一样,用 MSE 吗?
不是,用 cross entropy 比 MSE 更好。why?

原因:error surface。用一个直观例子解释,假设有一个三分类的模型,其中 y 1 y_1 y1 和 y 2 y_2 y2 这两类起主要作用,由 y 1 y_1 y1 和 y 2 y_2 y2 绘制(是参数吗?)的 error surface 如下图所示。可以看到,不论用 MSE 还是 Cross Entropy,都是左上角区域 loss 大,右下角区域 loss 小,假设训练开始时位于图中左上角蓝色点所示位置。如果 loss function 用 MSE,因为这一区域 loss 变化平缓,训练容易卡住。如果 loss function 用 Cross Entropy,因为这一区域 loss 变化陡峭,可以变化到 loss 更低的点。
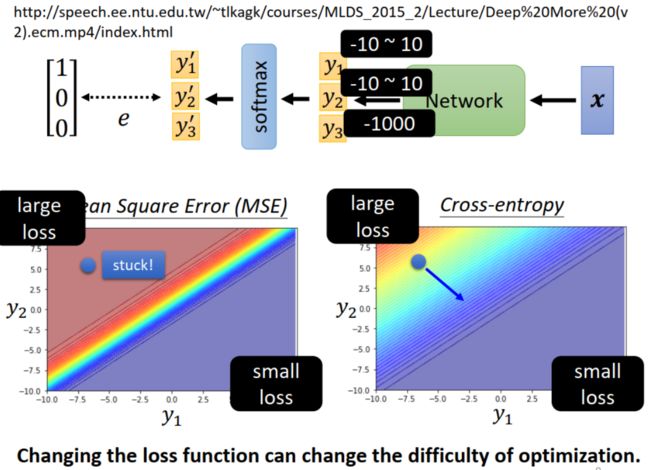
这也就是说,改变 loss function,可以改变 error surface(平缓或是陡峭),因此改变训练的难易程度。
听课收获
学到了很多 optimization 方面的知识,包括一些具体情况的处理,例如:模型的 loss 大,应该从哪里找原因? loss 不下降,训练卡住时,应该怎么办?做作业时看到老师的示例代码里设置了 batch size,用了 Adam 作为 optimizer,设置了 momentum 参数等,当时对这些都不太懂,学习了这节课之后明白了其中的原理。
本文对您有帮助的话,请点赞支持一下吧,谢谢!
关注我 宁萌Julie,互相学习,多多交流呀!
阅读更多笔记,请点击 李宏毅老师《机器学习》笔记–合辑目录。
参考
1.李宏毅老师《机器学习 2022》,
课程网站:https://speech.ee.ntu.edu.tw/~hylee/ml/2022-spring.php
视频:https://www.bilibili.com/video/BV1Wv411h7kN
2.《动手学深度学习》,AdaGrad 算法:http://zh.gluon.ai/chapter_optimization/adagrad.html