VTK笔记——医学图像配准(Landmark)
随着现代医学的迅速发展,医学影像学为临床诊断提供了多种模态的医学图像,如X射线,CT,MRI等,当然,他们各自有各自的诊断优势。不过,有时候,医生希望将不同图像信息进行适当的集成。然而不同模态的医学图像成像原理不同,风辨率,成像参数却不相同,因此在图像融合前必须进行图像匹配。
医学图像配准就是通过寻找一种(或一系列)的空间变换(旋转、偏移、缩放和变形等),使两幅图像的对应点达到空间位置和解剖结构上的完全一致。配准结果应使两幅图像上是所有的解剖点(精确匹配),或至少是所有具有诊断意义的点都达到匹配(粗略匹配)。
其中,基于标记点对应关系的配准方法已经得到了广泛的应用,即所谓的特征匹配,通常用于图像分割、特征提取和关键点(landmark)搜寻等场合。
vtkLandmarkTransform
vtkLandmarkTransform是一种比较经典的匹配算法,基于标记点,两个点集在配准后的平均距离最小,要求输入两个点数必须相等,序号一致的点集,做线性变换。它常用于粗略匹配,效率高。
下面简单的示范一下它是如何使用的?
1.源标记点集
vtkSmartPointer<vtkPoints> sourcePoints =
vtkSmartPointer<vtkPoints>::New();
double sourcePoint1[3] = {1.0, 0.0, 0.0};
sourcePoints->InsertNextPoint(sourcePoint1);
double sourcePoint2[3] = {0.0, 1.0, 0.0};
sourcePoints->InsertNextPoint(sourcePoint2);
double sourcePoint3[3] = {0.0, 0.0, 1.0};
sourcePoints->InsertNextPoint(sourcePoint3);
2.目标标记点集
vtkSmartPointer<vtkPoints> targetPoints =
vtkSmartPointer<vtkPoints>::New();
double targetPoint1[3] = {0.0, 0.0, 1.1};
targetPoints->InsertNextPoint(targetPoint1);
double targetPoint2[3] = {0.0, 1.02, 0.0};
targetPoints->InsertNextPoint(targetPoint2);
double targetPoint3[3] = {-1.11, 0.0, 0.0};
targetPoints->InsertNextPoint(targetPoint3);
3.设置Landmark
vtkSmartPointer<vtkLandmarkTransform> landmarkTransform =
vtkSmartPointer<vtkLandmarkTransform>::New();
landmarkTransform->SetSourceLandmarks(sourcePoints);
landmarkTransform->SetTargetLandmarks(targetPoints);
landmarkTransform->SetModeToRigidBody();
landmarkTransform->Update();
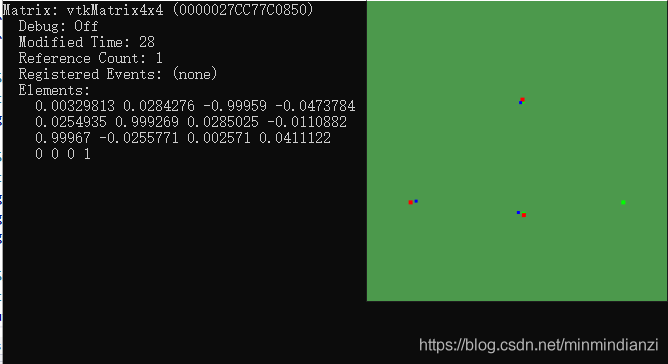
4.获取线性变换
vtkMatrix4x4* mat = landmarkTransform->GetMatrix();
效果
LandmarkTransform.cxx
#include Ref
VTKExamples/Cxx/Filtering/LandmarkTransform