轨迹对地下环境中无人机执行的RGB-DSLAM性能的影响
飞行器的勘探和测绘、检查和灾难响应应用,特别是在地下环境中,正受到关注。最近DARPA Sub-T挑战就证明了这一点。这些情况既时间紧迫又危险,因此可以通过自主无人机更有效地执行。它们还消除了与执行相同任务的人类相关的潜在危险的风险。但是在地下环境中飞行无人机对导航提出了挑战,因为它没有GPS,而且通常是黑暗和沉闷的。受自动对地下矿井进行安全检查所带来的潜在好处的启发,研究了自主无人机的轨迹设计对地下环境中SLAM性能的影响,特别是对检测到的闭环数量的影响。使用无人机评估支柱的地质特征可以消除人类面临危险的风险,同时也简化了数据采集过程。为了完成这样的任务,需要可靠的定位和映射解决方案。DJI Matrice 100 无人机与运行带有RTAB-Map的机器人操作系统 (ROS) 的机载计算机一起使用,以导航和绘制石灰岩矿中的柱子;设置如图1所示。该无人机使用英特尔L515来映射支柱,并使用英特尔T265结合 RTAB-Map 的里程计节点来自主定位自身。

图1 无人机在地下石灰石矿的支柱上自主执行SLAM
路径规划方法
无人机将跟随垂直于扫掠方向的来回扫掠运动,如图2所示,其中扫掠方向平行于区域的最低点和最高点之间的线性距离。这种路径设计确保了该区域的完整覆盖。两个覆盖行之间的最小重叠设置在 50%和90%之间,并且可以通过更改覆盖行数来更改。
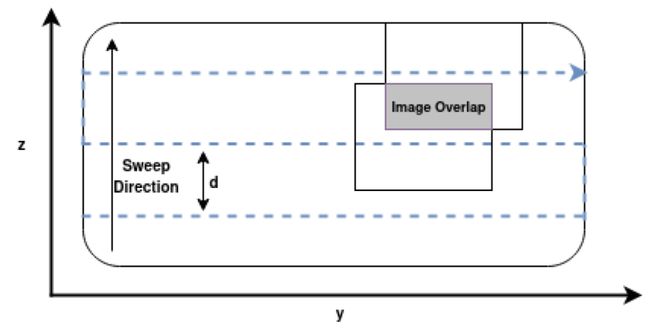
图2 垂直于行进方向的扫描模式以覆盖矩形区域
图像和路径参数之间的相关性包含影响任务某些方面的某些权衡。这些包括飞行时间、图像几何形状、墙壁距离和图像质量。例如,靠近墙壁飞行可能会改善图像细节,但这会降低相机的FOV。反之,距离墙壁越远,沿同一路径飞行可能会减少图像细节,但相机的FOV 会更大,因此飞行时间会减少。因此,配置这些参数以满足尽可能多的任务要求非常重要。
处理地图
要创建地图,必要的ROS主题会记录在ROS包中,然后通过 RTAB-Map进行处理。该地图是以1.0 Hz的更新速率增量构建的。这可以确保接收到的所有主题都是同步的。RTAB-Map通过检测闭环来逐步构建和优化地图。它使用词袋方法来创建在特定时间获得的图像的签名,并逐步在线构建词汇表。如果表示先前访问过的位置的新位置的概率低于设定的阈值,则接受检测到的闭环. 如果该值高于设置的阈值,则此循环关闭被视为无效并被拒绝。RTAB-Map还根据从 RGB图像中提取的视觉特征和深度图像中的深度信息计算里程计。
在图3中可以找到描述用于实现 RTAB-Map的视觉里程计节点的流水线的框图。需要注意的是,RTAB-Map中的里程计独立于映射过程。
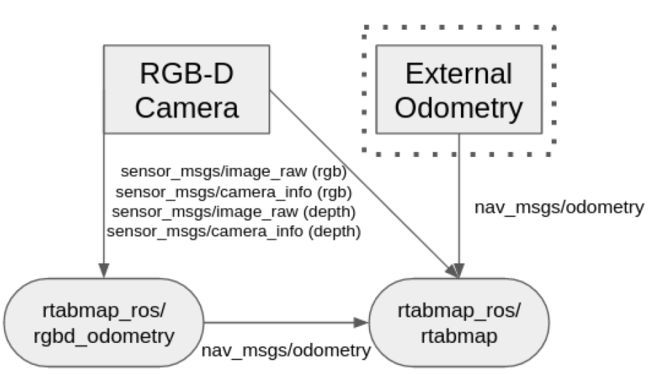
图3 RTAB-Map通过RGBD里程计节点或从外部源接收计算视觉里程计的流程
为了评估轨迹设计对SLAM质量的影响,设计了模拟和实验测试。模拟环境旨在复制与实验环境相似的条件,如图4所示。最重要的方面是无人机的传感器、轨迹、运动和覆盖区域。

图4 模拟(左)和实验(右)环境的并排视图
仿真环境
模拟实验设置在Gazebo 11 中,包括从DARPA SubT虚拟门户导入的洞穴环境。还添加了微妙的环境光,以减少照明对视觉里程计和环路闭合检测的苛刻影响。无人机与MAVLink ROS可扩展通信节点 (MAVROS) 连接,允许访问惯性测量单元 (IMU)、气压计、磁力计和全球定位系统 (GPS),以提供强大的定位解决方案。
实验环境
为了提供更多信息,我们在地下石灰石采石场使用配备 RealSense L515和RealSense T265的DJI Matrice 100无人机进行了实验测试。实验无人机使用T265估计定位解决方案,而L515用于墙壁跟踪并获得必要的RGB和深度图像以进行映射。进行实验的维护区域有环境光,有利于使用视觉里程计和环路闭合检测。
如图5所示,图像重叠的百分比直接影响检测到的回环的数量。据观察,总体趋势是随着重叠百分比的增加,循环闭合的数量也在增加。
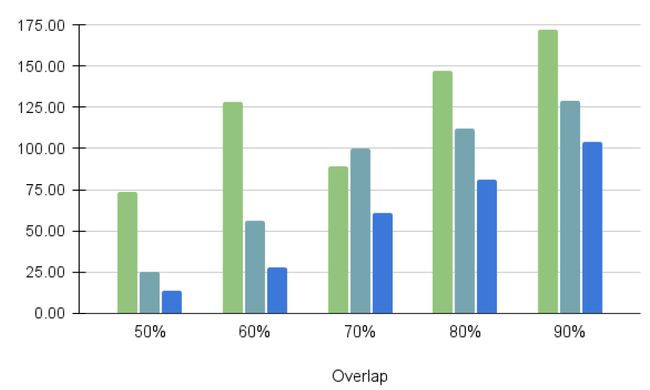
图5 使用 RTAB-Map 的里程计在地图处理期间检测到的回环总数(墙距离:绿色2m、青色3m 和蓝色4m)
尽管里程计解决方案的数值分析提供了对地图准确性的洞察,但发现生成的地图也必须进行定性评估。图6中的结果地图表明,RTAB-Map的里程计解决方案的准确性与地图质量之间不一定存在相关性。

图6 对解决方案接受错误闭环之前和之后处理的地图和路径的比较,绿色表示接受的闭环,红色表示拒绝的闭环。a) 接受不正确闭环之前的模拟支柱图,b) 接受不正确闭环之前的路径,c) 接受不正确闭环之后的模拟支柱图,d) 接受不正确闭环之后的路径不正确的闭环
从图8c可以看到有一条突出的水平绿线穿过展开的地图。这表示一个定义的边缘,这可能是墙壁表面轮廓的原因,也可能是没有重叠的迹象。与图8a和图8b相对应,图中存在明显的“间隙”。图7b和图8b显示物体相对于水平面的垂直程度,黄色几乎处于直角,蓝色非常水平。
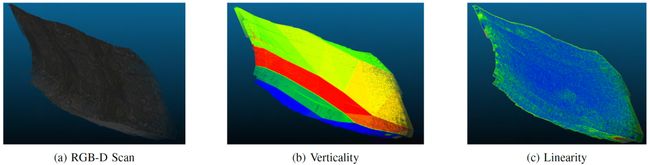
图7 使用模拟无人机捕获的模拟洞穴壁的三种不同点云配置。刻度显示蓝色为低强度,绿色为中等强度,红色为高强度
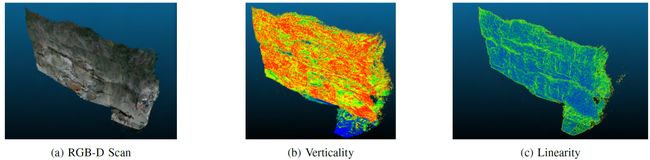
图8 在实验测试期间使用无人机捕获的同一支柱的三种不同点云配置。刻度显示蓝色为低强度,绿色为中等强度,红色为高强度
图8 在实验测试期间使用无人机捕获的同一支柱的三种不同点云配置。刻度显示蓝色为低强度,绿色为中等强度,红色为高强度
源自:2022 International Conference on Unmanned Aircraft Systems (ICUAS) Dubrovnik, Croatia. June 21-24, 2022