【OpenCV】OpenCV-Python实现相机标定+利用棋盘格相对位姿估计
写在前面:
这次要实现的功能:实时检测棋盘格相对于摄像头的距离以及位姿。为此主要步骤可分为以下三个步骤:标定图片的拍摄、相机的标定、以及棋盘格位姿的实时解算。
目录
1. 标定图片的拍摄
2. 相机的标定
3. 棋盘格位姿的实时解算
4. 需要注意的点
5. 运行效率问题
1. 标定图片的拍摄
 棋盘格图片
棋盘格图片
打印上面的图片,尽量铺满一张A4纸,边缘留出一定的空白以方便握持。这里使用的是10×7的棋盘格,内部有9×6个角点。
然后使用摄像头来随意拍摄棋盘格的15-20张照片。这里笔者踩了一个小坑,笔者一开始用的是电脑的相机应用拍摄了20张照片,分辨率为1280×720。进行后面的步骤都没什么问题,但是测得的结果怎么都不准。这是因为这颗摄像头录像和拍照的分辨率不一致,因此编写一个小程序来获得标定所用的照片。
import cv2
camera = cv2.VideoCapture(0)
i = 1
while i < 50:
_, frame = camera.read()
cv2.imwrite("E:/images/"+str(i)+'.png', frame, [int(cv2.IMWRITE_PNG_COMPRESSION), 0])
cv2.imshow('frame', frame)
i += 1
if cv2.waitKey(200) & 0xFF == 27: # 按ESC键退出
break
cv2.destroyAllWindows()保存的图片经过手动筛选,挑选出清晰度和完整度较好的20张,如下所示:
 利用摄像头拍摄的20张棋盘格图片
利用摄像头拍摄的20张棋盘格图片
2. 相机的标定
相机标定的原理此处略去,网上可以找到大量的相关资料。
有一点需要注意,标定中将世界坐标系的建在标定板上,所有的z坐标均为0。但是x和y坐标需要经过测量得出。笔者所打印的棋盘格一格的边长为2.6厘米,因此每一个角点在世界坐标系中的坐标都需要以2.6厘米为倍数。
相机标定部分的主要代码如下:
objp = np.zeros((6 * 9, 3), np.float32)
objp[:, :2] = np.mgrid[0:9, 0:6].T.reshape(-1, 2) # 将世界坐标系建在标定板上,所有点的Z坐标全部为0,所以只需要赋值x和y
objp = 2.6 * objp # 打印棋盘格一格的边长为2.6cm
obj_points = [] # 存储3D点
img_points = [] # 存储2D点
images=glob.glob("E:/image/*.png") #黑白棋盘的图片路径
for fname in images:
img = cv2.imread(fname)
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
size = gray.shape[::-1]
ret, corners = cv2.findChessboardCorners(gray, (9, 6), None)
if ret:
obj_points.append(objp)
corners2 = cv2.cornerSubPix(gray, corners, (5, 5), (-1, -1), (cv2.TERM_CRITERIA_MAX_ITER | cv2.TERM_CRITERIA_EPS, 30, 0.001))
if [corners2]:
img_points.append(corners2)
else:
img_points.append(corners)
cv2.drawChessboardCorners(img, (9, 6), corners, ret) # 记住,OpenCV的绘制函数一般无返回值
cv2.waitKey(1)
_, mtx, dist, _, _ = cv2.calibrateCamera(obj_points, img_points, size, None, None)
# 内参数矩阵
Camera_intrinsic = {"mtx": mtx,"dist": dist,}后面解算位姿所需要的参数为内参数矩阵mtx和畸变系数dist。据此求得的内参数矩阵和畸变系数如下:

内参矩阵的具体表达式如下:
其中,![]() 和
和![]() 分别是每个像素在图像平面
分别是每个像素在图像平面 和
和 方向上的物理尺寸,
方向上的物理尺寸,![]() 是图像坐标系原点在像素坐标系中的坐标,
是图像坐标系原点在像素坐标系中的坐标, 为摄像头的焦距,
为摄像头的焦距,![]() ,
,![]() 为焦距与像素物理尺寸的比值,单位为个(像素数目)。
为焦距与像素物理尺寸的比值,单位为个(像素数目)。
据此可以得到,这台摄像头的![]() ,说明焦距约等于450个像素的物理尺寸。
,说明焦距约等于450个像素的物理尺寸。![]() ,
,![]() 。这台摄像头的像素为640×480,因此
。这台摄像头的像素为640×480,因此![]() 的理论值应为320,
的理论值应为320, 的理论值应为240。误差主要是因为摄像头的分辨率太低,实际角点在像素坐标系中显示不准;此外,目标坐标系的测量时也会带来误差。
的理论值应为240。误差主要是因为摄像头的分辨率太低,实际角点在像素坐标系中显示不准;此外,目标坐标系的测量时也会带来误差。
3. 棋盘格位姿的实时解算
利用solvePnP函数可以实时解算出每一帧的旋转矢量rvec和平移矢量tvec。旋转矢量虽然简洁,但是作为结果显示不够直观,故需要将其转换为欧拉角。
在欧拉角中,俯仰角(pitch)代表绕x轴旋转的角度, 偏航角(yaw)代表绕y轴旋转的角度,滚转角(roll)代表绕z轴旋转的角度。其中,默认逆时针选择为正,顺时针旋转为负。
该部分的主要代码如下:
obj_points = objp # 存储3D点
img_points = [] # 存储2D点
#从摄像头获取视频图像
camera = cv2.VideoCapture(0)
while True:
_, frame = camera.read()
gray = cv2.cvtColor(frame, cv2.COLOR_BGR2GRAY)
size = gray.shape[::-1]
ret, corners = cv2.findChessboardCorners(gray, (9, 6), None)
if ret: # 画面中有棋盘格
img_points = np.array(corners)
cv2.drawChessboardCorners(frame, (9, 6), corners, ret)
# rvec: 旋转向量 tvec: 平移向量
_, rvec, tvec = cv2.solvePnP(obj_points, img_points, Camera_intrinsic["mtx"], Camera_intrinsic["dist"]) # 解算位姿
distance = math.sqrt(tvec[0]**2+tvec[1]**2+tvec[2]**2) # 计算距离
rvec_matrix = cv2.Rodrigues(rvec)[0] # 旋转向量->旋转矩阵
proj_matrix = np.hstack((rvec_matrix, tvec)) # hstack: 水平合并
eulerAngles = cv2.decomposeProjectionMatrix(proj_matrix)[6] # 欧拉角
pitch, yaw, roll = eulerAngles[0], eulerAngles[1], eulerAngles[2]
cv2.putText(frame, "dist: %.2fcm, yaw: %.2f, pitch: %.2f, roll: %.2f" % (distance, yaw, pitch, roll), (10, frame.shape[0] - 20), cv2.FONT_HERSHEY_SIMPLEX, 0.7, (0, 255, 0), 2)
cv2.imshow('frame', frame)
if cv2.waitKey(1) & 0xFF == 27: # 按ESC键退出
break
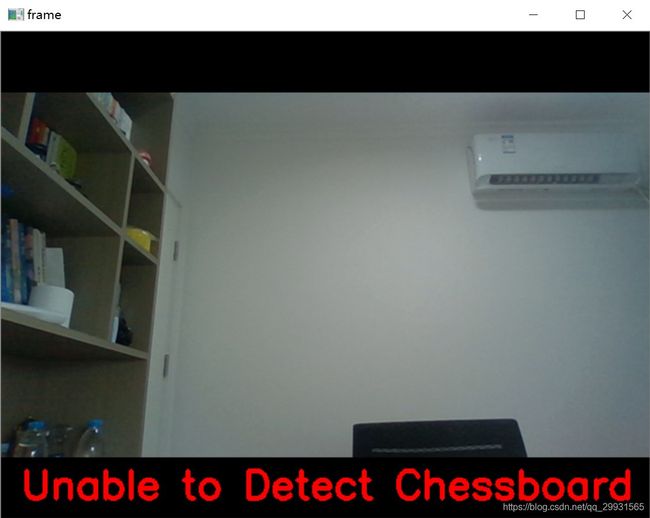
else: # 画面中没有棋盘格
cv2.putText(frame, "Unable to Detect Chessboard", (20, frame.shape[0] - 20), cv2.FONT_HERSHEY_SIMPLEX, 1.3, (0, 0, 255), 3)
cv2.imshow('frame', frame)
if cv2.waitKey(1) & 0xFF == 27: # 按ESC键退出
break
cv2.destroyAllWindows()当画面中检测不到棋盘格,或距离过远无法检测棋盘格的角点时,显示结果如下:
当画面中能正常检测棋盘格的角点时,显示结果如下:
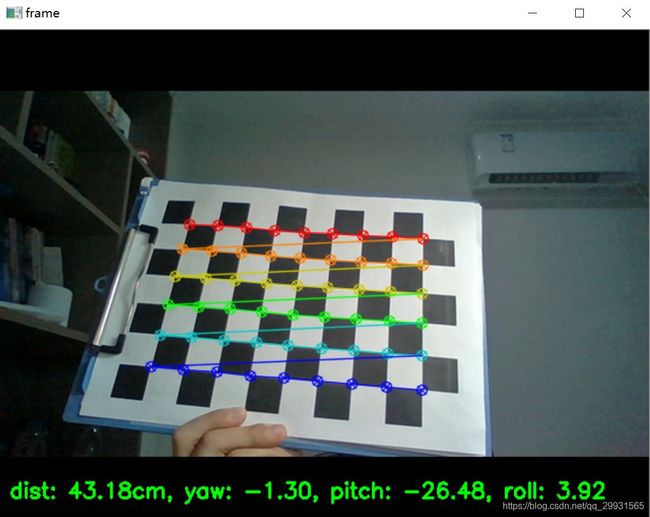
左上角第一个红点为标定时所确定的世界坐标系的原点,沿棋盘格向右为x轴正方向,沿棋盘格向下为y轴正方向。
此时该棋盘格的坐标原点与摄像头的距离为43.18cm,偏航角为-1.3°,俯仰角为-26.48°,滚转角为3.92°。经过验证,该结果与实际的误差在1%以内,证明了结果的正确性。
4. 需要注意的点
相对位姿估计的基本问题
- 输入:相机内参数;多个空间上的特征点在目标坐标系(3D)和相平面坐标系(2D)坐标
- 输出:目标坐标系相对相机坐标系的位置和姿态
也就是说,solvePnP函数求解的是目标坐标系相对相机坐标系的位置和姿态。为了提高结果的可读性,最好将初始位置的目标坐标系与相机坐标系的方向同一化。
相机坐标系的x轴和y轴对应着相平面坐标系的u轴和v轴,因此在实际操作中,确定目标坐标系时按照像素坐标系的方向来确定即可。具体如下:
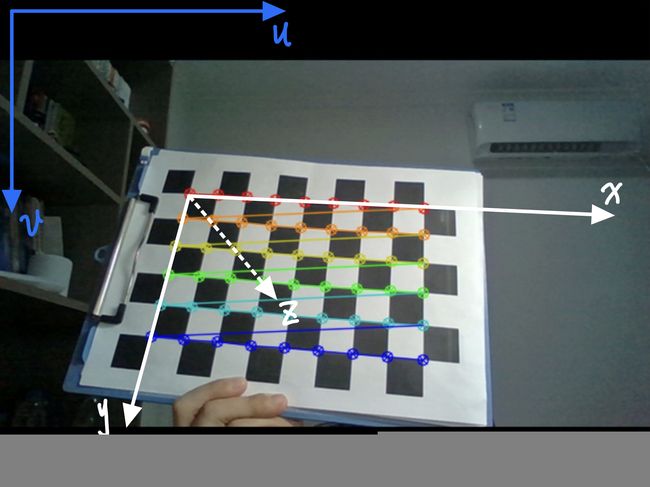
此处目标坐标系的坐标原点确定在第一个角点处,目的是为了在编程中简化目标坐标系的设置。实际上将目标坐标系的坐标原点确定在棋盘格的中心更为合理。
为了验证输出结果为目标坐标系相对于相机坐标系的位姿(顺序很重要),将棋盘格绕x轴逆时针旋转45°,输出俯仰角pitch也约为45°;将棋盘格绕y轴逆时针旋转45°,输出偏航角yaw也约为45°,将棋盘格绕z轴逆时针旋转45°,输出滚转角roll也约为45°。由此证明了输出结果为目标坐标系相对于相机坐标系的位姿。(如果结果符号不对,说明在编程中目标坐标系的设置有误)
5. 运行效率问题
在程序中加入时钟检测代码,可以得到每运行一帧所需要的计算时间。
 逐帧运行时间
逐帧运行时间
该程序运行于i7-8550U低压CPU平台,性能没有很高。当正常解算位姿时,一帧的平均运行时间在0.01秒以内,可以支持60Hz或90Hz的摄像头运行。但是当画面中没有棋盘格时,一帧的平均运行时间更长,原因是findChessboardCorners在寻找不到角点的情况下运算量更大。但是我们关注的只是正常解算位姿时的运行效率,无法检测棋盘格时的运行效率可以不予考虑。