R-CNN,Fast R-CNN详解
R-CNN
R-CNN可以说是利用深度学习进行目标检测的开山之作。作者Ross Girshick多次在PASCAL VOC的目标检测竞赛中折桂,曾在2010年带领团队获得终身成就奖。
R-CNN流程
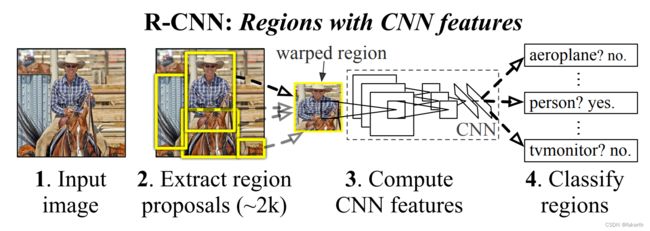
R-CNN流程可以分为4个步骤:
1.一张图像生成1k~2k个候选区域(使用Selective Search方法);
2.对每个候选区域,使用深度网络提取特征;
3.特征送入每一类的SVM分类器,判断是否属于该类;
4.使用回归器精细修正候选框位置。

1.Selective Search算法生成候选区域
Selective Search算法用于为物体检测算法提供候选区域,它速度快,召回率高。Selective Search算法需要先使用《Efficient Graph-Based Image Segmentation》论文里的方法产生初始的分割区域,然后使用相似度计算方法合并一些小的区域。简单介绍一下算法流程:

算法描述如下
* 输入:彩色图片
* 输出:物体可能的位置,实际上是很多的矩形坐标
1. 首先,使用论文中的方法将图片初始化为很多小区域 R = {r1, r2, ..., rn}。
2. 初始化一个相似集合为空集:S = {}
3. 计算所有相邻区域之间的相似度,放入集合 S 中,集合 S 保存的其实是一个区域对以及它们之间的相似度
for each 邻居区域对(ri, rj) do
计算相似度 s(ri, rj)
放入集合 S:S = S ∪ s(ri, rj)
4. 找出 S 中相似度最高的区域对,将它们合并,并从 S 中删除与它们相关的所有相似度和区域对。
重新计算这个新区域与周围区域的相似度,放入集合 S 中,并将这个新合并的区域放入集合 R 中,重复这个步骤直到 **S** 为空。
while S 不为空 do
从 S 中取得最大相似度区域对 s(ri, rj) = max(S)
将取得的区域对合并,产生新的区域:rt = ri ∪ rj
移除 ri 对应的所有相似度:S = S\s(ri, r*)
移除 rj 对应的所有相似度:S = S\s(r*, rj)
计算新的区域 rt 与周围区域的相似度集合 St
将 St 放入相似度集合 S:S = S ∪ St
将 新的区域 rt 放入集合 R:R = R ∪ rt
5. 从 R 中找出所有区域的 bounding box (即包围该区域的最小矩形框),
这些 box 就是物体可能的区域。
2.对候选区域使用深度网络提取特征
将生成的候选区域缩放到227x227,接着将候选区域输入事先训练好的AlexNet CNN网络(这里的AlexNet网络去掉最后的全连接层)获取4096维的特征得到2000×4096维矩阵。
3.特征送入每一类的SVM分类器,判断是否属于该类
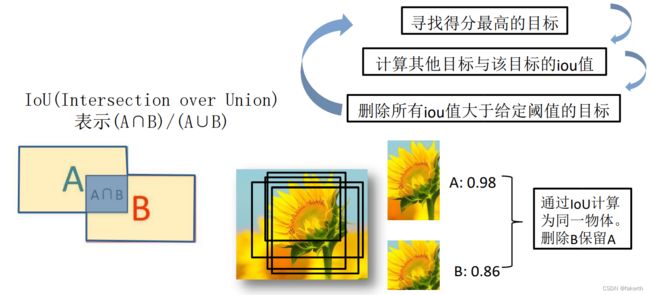
将2000×4096维特征与20个SVM组成的权值矩阵4096×20相乘,获得2000x20维矩阵表示每个建议框是某个目标类别的得分。分别对上述2000×20维矩阵中每一列即每一类进行非极大值抑制剔除重叠建议框,得到该列即该类中得分最高的一些建议框。
4.使用回归器精细修正候选框位置
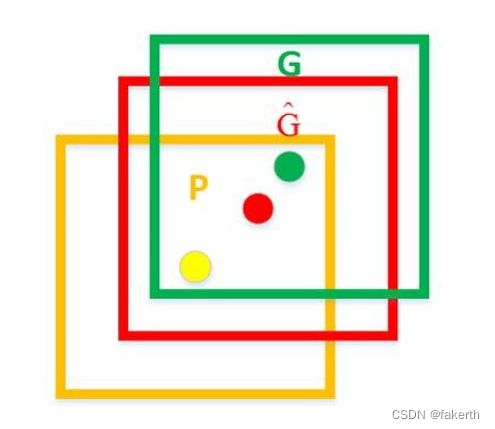
对NMS处理后剩余的建议框进一步筛选。接着分别用20个回归器对上述20个类别中剩余的建议框进行回归操作,最终得到每个类别的修正后的得分最高的bounding box。
如图,黄色框口P表示建议框Region Proposal,绿色窗口G表示实际框Ground Truth,红色窗口G表示Region Proposal进行回归后的预测窗口,可以用最小二乘法解决的线性回归问题。
R-CNN存在的问题
1.测试速度慢:测试一张图片约53s(CPU)。用Selective Search算法提取候选框用时约2秒,一张图像内候选框之间存在大量重叠,提取特征操作冗余。
2.训练速度慢:过程及其繁琐。
3.训练所需空间大:对于SVM和bbox回归训练,需要从每个图像中的每个目标候选框提取特征,并写入磁盘。对于非常深的网络,如VGG16,从VOC07训练集上的5k图像上提取的特征需要数百GB的存储空间。
Fast R-CNN
Fast R-CNN是作者Ross Girshick继R-CNN后的又一力作。与R-CNN相比训练时间快9倍,测试推理时间快213倍,准确率从62%提升至66%(再Pascal VOC数据集上)。
Fast R-CNN流程
1.一张图像生成1K~2K个候选区域(使用Selective Search方法) ;
2.将图像输入网络得到相应的特征图,将SS算法生成的候选框投影到
特征图上获得相应的特征矩阵;
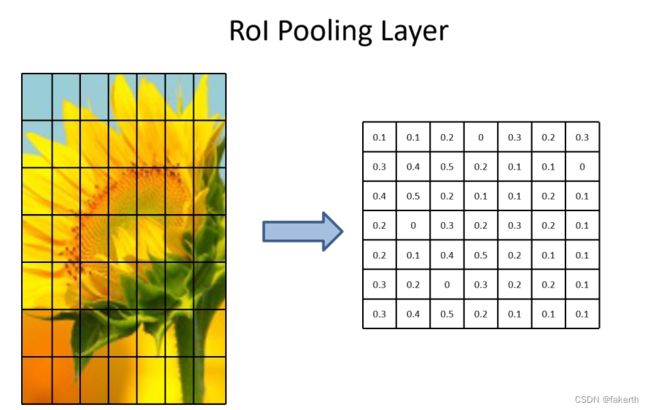
3.将每个特征矩阵通过ROI(Region of Interest) pooling层缩放到7x7大小的特征图,接着将特征图展平通过一系列全连接层得到预测结果。
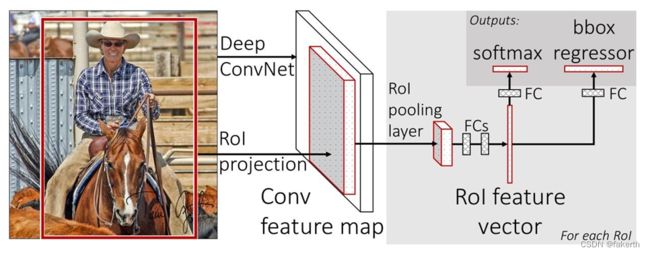

1.一张图像生成1K~2K个候选区域(同R-CNN第一步)
2.将图像输入网络得到相应的特征图,将SS算法生成的候选框投影到特征图上获得相应的特征矩阵;
与R-CNN相比,从第二步开始就完全不同了。Fast-RCNN将整张图像送入网络,紧接着从特征图像上提取相应的候选区域。这些候选区域的特征不需要再重复计算。
3.将每个特征矩阵通过ROI(Region of Interest) pooling层缩放到7x7大小的特征图,接着将特征图展平通过一系列全连接层得到预测结果。
关于ROI(Region of Interest) pooling层缩放到7x7大小的特征图,假设我们左边这张图为候选框对应特征图的特征矩阵,将其划分为7x7等份,对每一份进行maxpooling池化。无论你的特征矩阵多大,都能缩放成7x7大小。
关于分类器和边界框回归器,分类器输出N+1个类别的概率(N为检测目标的种类,1为背景)共N+1个节点,这里取N=20。
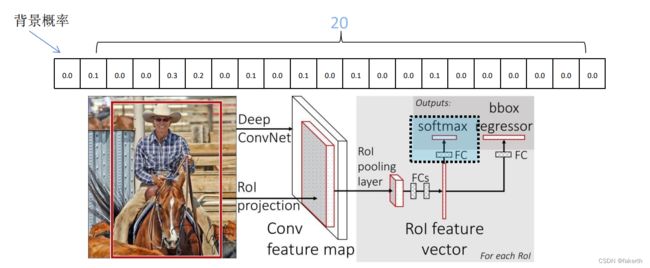
边界回归器输出对应N+1个类别的候选边界框回归参数(dx,dy,dw,dh),共(N+1)x4个节点,这里取N=20。
根据边界回归器的输出调整候选框的位置:
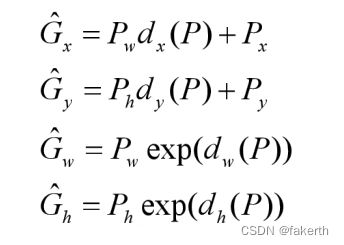
Px,Py,Pw,Ph分别为候选框的中心x,y坐标,以及宽高;
G x ^ \widehat{Gx} Gx , G y ^ \widehat{Gy} Gy , G w ^ \widehat{Gw} Gw , G h ^ \widehat{Gh} Gh 分别为最终预测的边界框中心x,y坐标,以及宽高。

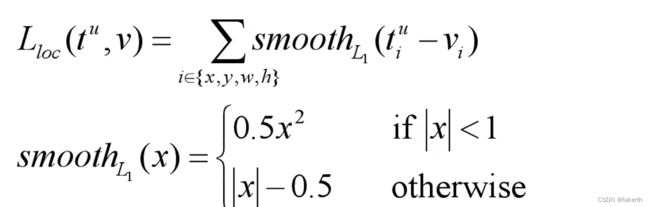
Fast R-CNN的损失函数包括两部分,分类损失和边界框回归损失:

p是分类器预测的softmax概率分布p=(p0……pk);
u对应目标真实类别标签;
tu对应边界框回归器预测的对应类别u的回归参数(txu,tyu,twu,thu);
v对应真实目标的边界框回归参数(vx,vy,vw,vh);
其中,vx = (Gx - Px)/Pw;vy = (Gy - Py)/Ph;vw=In(Gw/Pw);vh=In(Gh/Ph);
λ是一个平衡系数,用于平衡分类损失和边界框回归损失;
[u≥1]是一个艾弗森括号,当u≥1时,该项等于1;小于则该项等于0。当u≥1时,表示候选区域属于我们检测的某个类别,属于正样本,这时才有边界回归损失;等于0时表示候选区域是背景,是负样本,没有边界损失这一项;