光条中心提取方法总结(一)
现阶段光条中心提取主要分为两大类:传统算法和深度学习算法,其中传统算法应用较广,主要有几何中心法和能量中心法;而且对于深度学习算法 ,近几年刚开始流行,关于这类的论文屈指可数。
一、传统算法
1)提取 光条的几何中心法 ,如阈值法 、中心法等;
2)提取 光条的能量中心法, 如极值法 、重心法、拟合法等。 提取几何中心算法简单 ,运行速度快, 但精度低, 受阈值与噪声影响较大。
对于这些基本算法不做赘述,以下算法均为论文所提出的改进算法(附论文)。
1.基于图像灰度梯度的条纹中心全分辨率精确提取方法
论文:线结构光条纹中心的全分辨率精确提取
首先基于灰度阈值法 ,利用条纹在行与列上的 分布情况提取条纹全分辨率中心点 ,并作为初值, 然后在初值点计算条纹法向, 最后 ,在条纹法向上 精确获取条纹的能量中心 。
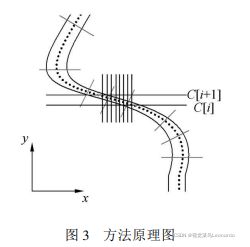
原理:(1)沿y方向应用灰度阈值法依次获取条纹中心:

式中 c[ i] 为条纹中心数组, U 和 V 分别为摄像机 上图像在 x , y 方向的最大分辨率 , uj 为条纹在 y =i 时 x 方向上的几何中心。 几何中心可以先用Canny进行边缘检测,然后再用检测后得到的光条纹两侧边缘图像取中值得到几何中心。(方法类似灰度重心法)
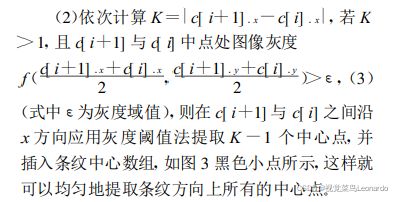
理解:K代表的是沿x方向的灰度梯度,如果K>1,代表两点之间的灰度梯度过大 ,图像梯度可以反馈为某点的直线斜率(导数),当K=1时代表斜率均衡,K>1代表梯度过大或者梯度为负,那么为了准确性,中间务必要再取n个点来作为中心点,这里n=K-1。
计算条纹法向:

理解:这里的梯度Gx,Gy都是用Sobel计算的,Sobel利用一个矩阵来进行卷积,思路类似于求一阶导和二阶导时用的也是矩阵卷积,用sobel可以卷积出每一点在x方向和y方向的梯度。
计算出梯度后,采用 Bazen 方法计算光条在点(i , j) 处的法向 : 取以(i , j)为中心的 w ×w 子块, 计算点(i , j)的方向 θ(i , j):



还可以用均方灰度梯度法计算法向.
获取条纹精确中心
