策略学习(Policy-Based Reinforcement Learning)
前言
前面我们讲了强化学习的基本概念,这节课来说一说强化学习的策略学习(Policy-based)算法。
在进入正文之前说一句:策略学习的目标就是要用一个神经网络来近似策略函数,这个神经网络叫做策略网络(Policy Network),它可以用来控制agent运动;想要训练策略网络,就要用到Policy Gradient算法,该算法是策略学习的核心;还有中间计算策略梯度我仅仅是把推导公式列了出来,简要的说了一下,如果仅仅是应用强化学习算法解决问题,中间过程不太懂也没关系,就看看最后的策略梯度算法的过程理解一下就可以了;
一、策略学习
1.策略函数π(a|s):它是一个概率密度函数,可以用来自动控制agent运动;它的输入是当前的状态s,输出是一个概率分布;

以超级玛丽这个游戏为例,假设给定当前状态s后,策略函数输出三个概率值,向左,向右和向上跳的概率分别为0.2,0.1和0.7;
代码如下(示例):
这个例子里输入是状态s,输出是一个3行1列的列向量,向量的每一个元素是动作的概率,有了这三个概率值,agent做一次随机抽样,就得到了动作a,三个动作都有可能被抽到,但是向上的动作被抽到的概率最大,抽出动作a后,agent就做动作a;
2.求得策略网络的过程:以游戏为例,如果一个游戏只有五个状态,十个动作,那就有一个5*10的表格,那就很简单了,我们通过玩这个游戏把表里的每个概率算出来;
超级玛丽这样的游戏有无穷的状态,根本不可能把每个状态可能采取的动作都记录在一张表格里,超级玛丽这个游戏我们就没有办法直接计算策略函数,大部分情况下都没有办法直接计算策略函数,所以要做函数近似;函数近似的方法有很多种:线性函数,kernel函数,神经网络,我们当然是要用神经网络去近似策略函数喽-;
我们使用π(a|s;θ)近似π(a|s);θ是神经网络的参数,一开始并不知道,是随机初始化的,通过学习来改进θ;
介绍完策略学习的一些概念后,开始介绍策略学习喽
3.策略学习

我们的目标就是近似Vπ(st),Vπ(st)是对状态价值函数求的期望值,那么根据agent采取的动作是离散值还是连续值,下面是action为离散和连续的时候Vπ(st)的计算公式
我们使用神经网络来近似Vπ(st),把Vπ(st)的π(即策略函数)用神经网络来近似,Vπ(st)就变成了下面的形式:
 Qusetion:怎么样让策略网络变得越来越好呢?答案就是改进模型参数θ,让V(st;θ)变得越来越大,因此我们就把目标函数定义为了V(st;θ)的期望,这个期望是关于状态s求的,把状态s作为随机变量,求其期望值s就被去掉了,就是一个关于θ的函数了,那就让J(θ)越大越好;
Qusetion:怎么样让策略网络变得越来越好呢?答案就是改进模型参数θ,让V(st;θ)变得越来越大,因此我们就把目标函数定义为了V(st;θ)的期望,这个期望是关于状态s求的,把状态s作为随机变量,求其期望值s就被去掉了,就是一个关于θ的函数了,那就让J(θ)越大越好;
![]() 要让J(θ)越来越大,就需要使用策略梯度(Policy Gradient)的方法;
要让J(θ)越来越大,就需要使用策略梯度(Policy Gradient)的方法;
让agent玩游戏,每一步观测到不同的状态s,(状态s相当于从状态的概率分布随机抽样得到的);把V(s;θ)关于θ求导,得到它的梯度后,用梯度上升的方法来更新θ,这很类似于随机梯度上升,随机性来源于状态s,我们计算的应该J(θ)关于θ的导数,这才是更新θ用到的梯度,这里我们计算的是V(s;θ)关于θ的导数,因为我们不可能在开始玩游戏的时候就知道所有的状态s;V(s;θ)关于θ的导数被称为策略梯度;

4.计算策略梯度(Policy Gradient):
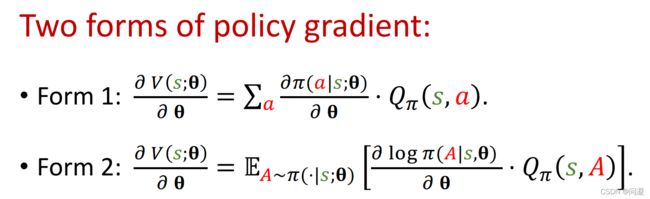
在计算梯度时我们假设Qπ(s,a)不依赖于策略π,(事实上是依赖于π的),仅仅是为了方便理解,不是特别严谨,如果你只是用策略梯度的算法,这么理解就可以了;最终得到计算策略梯度的公式:

注意上面计算V(s;θ)关于θ的导数是action是连续值的时候,action为离散值的情况很简单,直接在最后列出离散值情况的公式了;

最终我们得到了action为离散值和连续值两种情况的公式:
5.策略梯度算法的过程:

在t时刻观测到状态st;
然后用蒙特卡洛近似来计算策略梯度,把策略网络π作为概率密度函数,用策略网络π随机抽样得到一个动作at;
计算动作价值函数的值,把结果即为qt;
对策略网络π求导,算出对于θ的梯度;
近似的计算策略梯度;
更新策略网络;
一个问题:我们并不知道怎么计算qt即动作价值函数的值;
两种方法:1.REINFORCE:一种叫做REINFORCE的算法,用策略网络π来控制agent运动,一直玩到游戏结束,把整个游戏的轨迹记录下来s1,a1,r1,s2,a2,r2,…,st,at,rt;观测到所欲的奖励rt,就计算出来ut,(注意这里的ut是Ut的观测值)因为Qπ(st,at)= E(Ut),我们用观测值ut代替Qπ(st,at),即qt=ut这是一种近似;
2.用神经网络近似Qπ,这样就用了两个神经网络,近似Qπ(s,a)的神经网络q(s,a;w)(称为价值网络)被称为critic,另一个近似π(a|s)的神经网络(称为策略网络)π(a|s,θ)称为actor;这样就引出了actor-critic method;接下来会介绍acrot-critic method;
总结
以上就是今天要讲的内容,本文仅仅简单介绍了策略学习方法,如有错误请谅解并指正。