机器学习算法(一) K-Means算法简述以及在MNIST上的聚类实现
目录
前言
简述
优点
缺点
距离
欧几里得距离
余弦距离
曼哈顿距离
实例:k-means在MNIST数据集的训练集上聚类(自定义)
总结
前言
本文面向机器学习完全从零开始,但对python有足够了解的小白(毕竟我也是),如果有人发现错误也请指正,笔者会十分感谢。已有基本了解的人可以直接跳到后文MNIST聚类实现。
环境:python 3。
调用库:numpy、struct(用来解析数据,暂时不必了解)。
简述
K-means算法,意为K-均值。这里的K为常数,需事先设定,简单地说,该算法就是把n个样本分成k个类别。在对样本进行分类的过程一般是以样本之间的距离作为指标。距离这个概念我们下面会讲。
伪代码如下:
function K-Means(输入数据,中心点个数K)
获取输入数据的维度Dim和个数N
随机生成K个Dim维的点
while(算法未收敛)
对N个点:计算每个点属于哪一类。
对于K个中心点:
1,找出所有属于自己这一类的所有数据点
2,把自己的坐标修改为这些数据点的中心点坐标
end
输出结果:
end
算法收敛条件:聚类结果稳定、达到最大迭代次数等网上有这样一个牧师布道模型来辅助理解:
有四个牧师去郊区布道,一开始牧师们随意选了几个布道点,并且把这几个布道点的情况公告给了郊区所有的居民,于是每个居民到离自己家最近的布道点去听课。
听课之后,大家觉得距离太远了,于是每个牧师统计了一下自己的课上所有的居民的地址,搬到了所有地址的中心地带,并且在海报上更新了自己的布道点的位置。
牧师每一次移动不可能离所有人都更近,有的人发现A牧师移动以后自己还不如去B牧师处听课更近,于是每个居民又去了离自己最近的布道点……
就这样,牧师每个礼拜更新自己的位置,居民根据自己的情况选择布道点,最终稳定了下来。
以二维空间、欧式距离划分为例,我们再来看看这个图片加深理解:
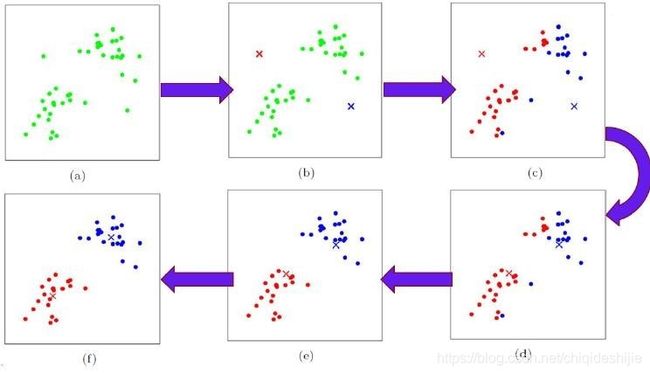
a.一堆数据点
b.在数据点中初始化了两个中心点
c.根据离中心点的距离将数据分为两类
d.将同类数据的中心(坐标求平均值)设置为新的中心点
e.根据新的中心点,重新划分数据
f.根据新的划分结果重新寻找中心点
优点
-
容易理解;
-
算法复杂度低。
缺点
-
K 值需要人为设定;
-
对K值敏感,不同 K 值得到的结果不一样;
-
对初始的中心点敏感,不同选取方式会得到不同结果;
-
对异常值敏感,比如1,3,4,5,100这一组数据质心在22.6,偏的非常离谱;
-
对数据分布敏感,不适合太离散的分类、样本类别不平衡的分类、非凸形状的分类等等。
距离
距离是什么概念?可以简单理解为样本在某种规则下的相似程度。
本篇采用欧几里得距离。
以下为几种常用距离。
欧几里得距离
即我们所熟悉的坐标系里的两点距离。

余弦距离
即两个向量间的夹角的余弦值。
![]()
曼哈顿距离
两点的各轴间距的绝对值的总和。(这个可能会相对陌生一些,可以百度一下补补课,笔者就不干数学老师的活儿了)
实例:k-means在MNIST数据集的训练集上聚类(自定义)
我们用这样的例子来理解一下k-means、距离等具体是什么东西。
首先要知道MNIST是什么,这个详情大家自行百度,总之是一个手写体数据集,每个样本都是一个28*28的灰度图形。
下面的解码过程暂时不用深究(这里也讲不完),你只需要知道,最终解析出来的train_images和test_images是三维数组(其中一维是图片总数,train_images是60000,test_images是10000;另外两维度是28,28。没错就是灰度图形的特征);train_labels和test_labels是一维数组(分别存放前面两个数组对应序号图片的标签)。
特征维度上的欧式距离能度量两张图片的相似程度。
import numpy as np
import struct
# 训练集文件,右边是文件地址
train_images_idx3_ubyte_file = 'MNIST_data/train-images.idx3-ubyte'
# 训练集标签文件
train_labels_idx1_ubyte_file = 'MNIST_data/train-labels.idx1-ubyte'
# 测试集文件
test_images_idx3_ubyte_file = 'MNIST_data/t10k-images.idx3-ubyte'
# 测试集标签文件
test_labels_idx1_ubyte_file = 'MNIST_data/t10k-labels.idx1-ubyte'
def decode_idx3_ubyte(idx3_ubyte_file):
"""
解析idx3文件的通用函数
:param idx3_ubyte_file: idx3文件路径
:return: 数据集
"""
# 读取二进制数据
bin_data = open(idx3_ubyte_file, 'rb').read()
# 解析文件头信息,依次为魔数、图片数量、每张图片高、每张图片宽
offset = 0
fmt_header = '>iiii' #因为数据结构中前4行的数据类型都是32位整型,所以采用i格式,但我们需要读取前4行数据,所以需要4个i。我们后面会看到标签集中,只使用2个ii。
magic_number, num_images, num_rows, num_cols = struct.unpack_from(fmt_header, bin_data, offset)
print('魔数:%d, 图片数量: %d张, 图片大小: %d*%d' % (magic_number, num_images, num_rows, num_cols))
# 解析数据集
image_size = num_rows * num_cols
offset += struct.calcsize(fmt_header) #获得数据在缓存中的指针位置,从前面介绍的数据结构可以看出,读取了前4行之后,指针位置(即偏移位置offset)指向0016。
print(offset)
fmt_image = '>' + str(image_size) + 'B' #图像数据像素值的类型为unsigned char型,对应的format格式为B。这里还有加上图像大小784,是为了读取784个B格式数据,如果没有则只会读取一个值(即一副图像中的一个像素值)
print(fmt_image,offset,struct.calcsize(fmt_image))
images = np.empty((num_images, num_rows, num_cols))
for i in range(num_images):
if (i + 1) % 10000 == 0:
print('已解析 %d' % (i + 1) + '张')
print(offset)
images[i] = np.array(struct.unpack_from(fmt_image, bin_data, offset)).reshape((num_rows, num_cols))
offset += struct.calcsize(fmt_image)
return images #这是num_row*num_col的ndarray
def decode_idx1_ubyte(idx1_ubyte_file):
"""
解析idx1文件的通用函数
:param idx1_ubyte_file: idx1文件路径
:return: 数据集
"""
# 读取二进制数据
bin_data = open(idx1_ubyte_file, 'rb').read()
# 解析文件头信息,依次为魔数和标签数
offset = 0
fmt_header = '>ii'
magic_number, num_images = struct.unpack_from(fmt_header, bin_data, offset)
print('魔数:%d, 图片数量: %d张' % (magic_number, num_images))
# 解析数据集
offset += struct.calcsize(fmt_header)
fmt_image = '>B'
labels = np.empty(num_images)
for i in range(num_images):
if (i + 1) % 10000 == 0:
print ('已解析 %d' % (i + 1) + '张')
labels[i] = struct.unpack_from(fmt_image, bin_data, offset)[0]
offset += struct.calcsize(fmt_image)
return labels方便起见我们定义4个函数分别去解码对应文件。上一代码块和这一代码块写在同一个py文件里,命名为loader.py。
def load_train_images(idx_ubyte_file=train_images_idx3_ubyte_file):
return decode_idx3_ubyte(idx_ubyte_file)
def load_train_labels(idx_ubyte_file=train_labels_idx1_ubyte_file):
return decode_idx1_ubyte(idx_ubyte_file)
def load_test_images(idx_ubyte_file=test_images_idx3_ubyte_file):
return decode_idx3_ubyte(idx_ubyte_file)
def load_test_labels(idx_ubyte_file=test_labels_idx1_ubyte_file):
return decode_idx1_ubyte(idx_ubyte_file)接下来我们定义kmeans类。
这个定义过程是自己写的,与sklearn中的定义可能不太相同,也因此可能会有代码冗余等,如有人愿意帮忙修改,感激不尽。
import numpy as np
import loader
class Kmeans:
def __init__(self,k,maxiter,data,labels):
self.k = k #k是簇的数目
self.maxiter=maxiter #最大迭代次数
self.data=data
#输入的数据,是一个(m,n*n)的数组,m代表有m个测试图,n*n是特征。
#(例如由图片28*28二维矩阵转化为这个784一维矩阵)
self.labels=labels #标签文件,也是一个对应位置的一维矩阵。
self.distances=np.zeros((self.data.shape[0],self.k))
#data.shape[0]代表测试图数目(前文注释的m)。
#data.shape[1]代表测试图特征(前文注释的n*n)。
#创建个空的(m,k)数组,用来保存距离。
self.centre=np.zeros((self.k,self.data.shape[1]))
#创建个空的(k,n*n)数组,用来保存中心点。
def get_distances(self):
#计算每幅图到每个中心图距离的函数,算得的距离保存为一个(m,k)数组。
#这个数组在m上的索引顺序与data相同,即还是按照原来的顺序对应图片。
for i in range(self.data.shape[0]): #对每幅图进行计算。
distance_i=((np.tile(self.data[i],(self.k,1))-self.centre)**2).sum(axis=1) ** 0.5
#计算每个点到中心点的距离,得到一个长度k的一维数组。
self.distances[i]=distance_i
#将得到的一维数组放在distances的对应位置,k轴从0到k-1。
def get_centre(self): #初始化中心点,并初始化分类数组。
self.classifications=np.random.randint(0,self.k,(self.data.shape[0]))
#创建一个(m,)的分类数组,里面填充[0,k)的随机整数,代表每个图的初始化聚类。
for i in range(self.k):
self.classifications[i]=i
#防止出现空的聚类使后面中心点计算报错。
def classify(self): #分类的函数。
new_classifications=np.argmin(self.distances,axis=1)
#计算【距离数组里每一行的最小值的索引】所组成的一维数组。
if any(self.classifications-new_classifications):
self.classifications=new_classifications
#如果得到的一维数组与之前的分类数组不完全相同,则该数组作为新分类数组。
return 1
#返回值控制外部循环。
else:
return 0
#如果完全相同就跳过,不用再替换了。返回值控制外部循环。
def update_centre(self): #更新中心点的函数。
for i in range(self.k):
self.centre[i] = np.mean(self.data[self.classifications==i], axis=0 )
#每个聚类的中心点是【所有标签为该聚类的点的中心】,即数据轴的平均值。
def work(self): #kmeans的计算函数。
self.get_centre() #先初始化中心点。
for i in range(self.maxiter): #控制次数。
self.update_centre() #更新中心点。
self.get_distances() #求距离。
if(not self.classify()): #根据距离分类。
break
#如果分类不变化则停止for循环。接下来就要开始聚类了。首先是对于数据的处理。这里我们把三维数组拉成了二维数组,代表图片数目的维度不变,代表特征的28*28二维压缩成784大小的一维。
train_images = loader.load_train_images()
train_labels = loader.load_train_labels()
test_images = loader.load_test_images()
test_labels = loader.load_test_labels()
m = 1500 # 创建一个读入数据的数组,部分选取图片进行训练。m为选取数目。
n_clusters=30 #聚类的数目,即k值
trainingMat = np.zeros((m, 784))
#初始化存放部分选取图片的数组并拉直,即(m,n*n)的数组。置为0。
part_train_labels=train_labels[0:m] #直接截取出存放这部分图片标签的数组。
for i in range(m):
for j in range(28):
for k in range(28):
trainingMat[i, 28*j+k] = train_images[i][j][k]
#将前面m张图片赋给存放部分图片的数组。运行一下我们写的kmeans。
a=Kmeans(n_clusters,300,trainingMat,part_train_labels)
a.work()接下来检查一下预测结果。
label_num = np.zeros((n_clusters, 10))
for i in range(a.classifications.shape[0]):
pred = int(a.classifications[i])
truth = int(part_train_labels[i])
label_num[pred][truth] += 1
## 查看KNN label---> number label的对应关系
label2num = label_num.argmax(axis=1)
set( label2num ) ## 看下分类是否覆盖10个数字
train_preds = np.zeros(part_train_labels.shape)
for i in range(train_preds.shape[0]):
train_preds[i] = label2num[a.classifications[i]]
print("训练数据上的精度:{}".format(np.sum(train_preds==part_train_labels) / part_train_labels.shape[0]))以下是运行结果,大功告成。
魔数:2051, 图片数量: 60000张, 图片大小: 28*28
16
>784B 16 784
已解析 10000张
7839232
已解析 20000张
15679232
已解析 30000张
23519232
已解析 40000张
31359232
已解析 50000张
39199232
已解析 60000张
47039232
魔数:2049, 图片数量: 60000张
已解析 10000张
已解析 20000张
已解析 30000张
已解析 40000张
已解析 50000张
已解析 60000张
魔数:2051, 图片数量: 10000张, 图片大小: 28*28
16
>784B 16 784
已解析 10000张
7839232
魔数:2049, 图片数量: 10000张
已解析 10000张
训练数据上的精度:0.7466666666666667总结
k-means算法还有很多缺陷,也因此有k-means++等众多优化方案,在此不赘述。(没力气讲了)
如果有人看的话可能还会继续更新其他的机器学习算法以及k-means后续优化。
有问题欢迎评论或私信。