基于S函数的BP神经网络PID控制器及simulink仿真
基于S函数的BP神经网络PID控制器及simulink仿真
文章目录
- 文章来源和摘要
- S函数的编写格式和运行步骤
- simulink模型结构
- S函数模型初始化部分代码理解
- S函数模型更新部分
- S函数模型输出部分
- S函数完整代码附录
文章来源和摘要
S函数的编写格式和运行步骤
S函数相当于simulink中自定义的软件包,当simulink中没有现成的功能模块可用时,就可以通过编写s函数的方式来进行仿真。
S函数的编写格式为
![]()
各个变量对应的含义分别为

运行步骤:

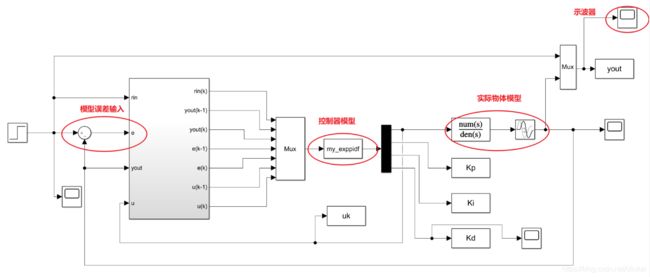
simulink模型结构
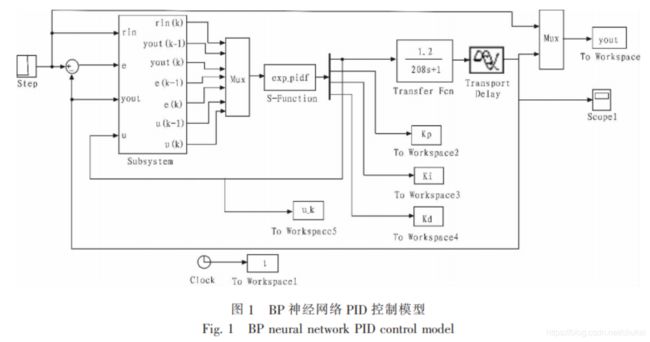
在simulink中搭建模型如下
其中mux的作用是把常量合并成数组
demux(黑色部分)的作用是吧一个数组重新解析成标量
在这里有一个疑惑,就是输入的子系统中,并没有设置有效的单位延时

在BP神经网络+PID控制simulink仿真 - zkzfengyi的博客 - CSDN博客
这篇博客的评论区里,大家普遍认为有造假的嫌疑,我也十分困惑。

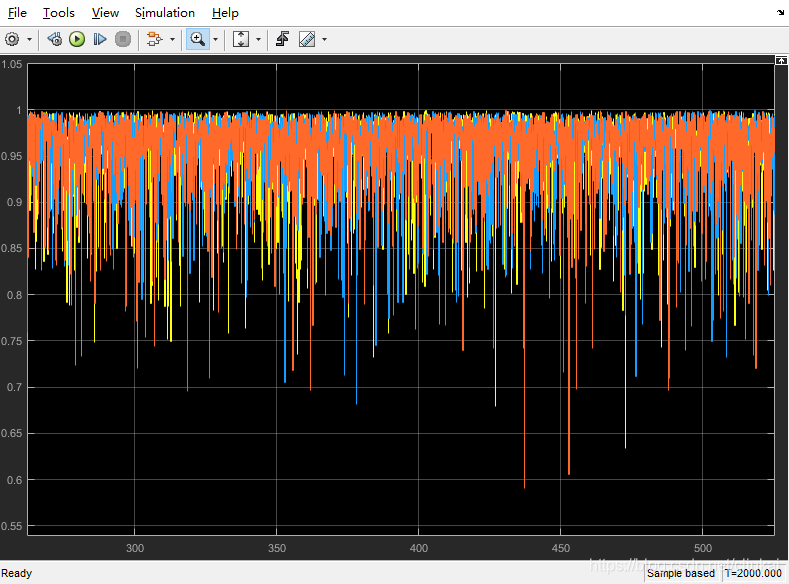
控制器部分,利用S函数实现BP神经网络的PID。论文给出的仿真效果如下

实际的控制器仿真效果如图

PID的输出参数变化
S函数模型初始化部分代码理解
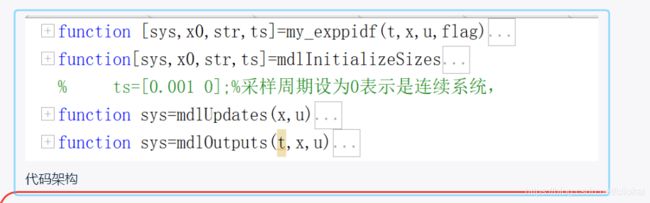
S函数总共分为4个部分,第一部分为切换函数,第二部分为初始化,第三部分为数据更新部分,第四部分为模型输出。
% 模型初始化
function[sys,x0,str,ts]=mdlInitializeSizes
sizes=simsizes;%用于设置模块参数的结构体用simsizes来生成
sizes.NumContStates=0;%模块连续状态变量的个数
sizes.NumDiscStates=3;%模块离散状态变量的个数
sizes.NumOutputs=4;%模块输出变量的个数
sizes.NumInputs=7;%模块输入变量的个数
sizes.DirFeedthrough=1;%模块是否存在直接贯通,1表示存在直接贯通,若为0,则mdlOutputs函数里不能有u
sizes.NumSampleTimes=1;%模块的采样时间个数,至少是一个
sys=simsizes(sizes);%设置完后赋给sys输出
x0=zeros(3,1);%系统状态变量设置,3行一列
str=[];
ts=[0 0];%采样周期设为0表示是连续系统,
% ts=[0.001 0];%采样周期设为0表示是连续系统,
simsizes是什么,帮助文档给出如下
ans =
包含以下字段的 struct:
NumContStates: 0 NumDiscStates: 0 NumOutputs: 0 NumInputs: 0 DirFeedthrough: 0 NumSampleTimes: 0
说明是一个系统的默认变量,不需要初始化就能直接引用。
S函数模型更新部分

% 模型更新部分,输入为系统状态量和系统输入
function sys=mdlUpdates(x,u)
T=0.001;
x=[u(5);x(2)+u(5)*T;(u(5)-u(4))/T];%3个状态量(偏差、偏差和以及偏差变化量),u(5)是偏差,u(4)是上一次的偏差,x(2)则是之前的偏差和
sys=[x(1);x(2);x(3)];
x和u分别是什么?
u应该就是mux左侧的那7个输入变量,实际对应u(1)~u(7)
在这之前,初始化的时候,x0=zero(3,1)=[0;0;0],这里的x正式成为状态量,分别为偏差,偏差和,偏差变化量。
所以模型更新部分实际只更新了状态量。
S函数模型输出部分
参数的初始化
% 这一段基本上都是一些参数的初始化
xite=0.2; % 学习速率
alfa=0.05; % 惯性因子
IN=3;H=5;OUT=3; % 神经网络的3-5-3架构
% 输入层-隐含层的加权系数
wi=rand(5,3);%产生一个5*3的随机数矩阵,随机数在(0,1)区间
wi_1=wi;wi_2=wi;wi_3=wi; % 隐含层加权系数
% 隐含层-输出层的加权系数
wo=rand(3,5);
wo_1=wo;wo_2=wo;wo_3=wo; % 输出层加权系数
Oh=zeros(5,1); %产生一个1*5的零矩阵(行矩阵),这里就是隐含层
I=Oh;
% 输入层的具体输入
xi=[u(1),u(3),u(5)];%神经网络训练的3个输入,期望值、误差以及实际值
% PID的3个对应参量
epid=[x(1);x(2);x(3)];%3个状态变量(偏差、偏差和、偏差变化量)(3*1矩阵,列向量)
I=xi*wi';%隐层的输入
接着进行隐含层节点和输出层节点值的更新
% 更新隐含层
for j=1:1:5
% 隐含层的节点值
Oh(j)=(exp(I(j))-exp(-I(j)))/(exp(I(j))+exp(-I(j)));%隐层的输出值(1*5矩阵)行矩阵
end
% 更新输出层
K1=wo*Oh; % 输出层的输入值(3*1矩阵)
for i=1:1:3
% 输出层的输出值
K(i)=exp(K1(i))/(exp(K1(i))+exp(-K1(i)));%得到输出层的输出(KP、KI、KD)(1*3矩阵,行向量)
end
% 这里得到的K相当于是pid的3个参数
% 最终控制器的完全输出值
u_k=K*epid;%计算得到控制律u,1个值
最后,根据反向传播算法进行权值的调整
%隐含层至输出层的权值调整
dyu=sign((u(3)-u(2))/(u(7)-u(6)+0.0001));
for j=1:1:3
dK(j)=2/(exp(K1(j))+exp(-K1(j)))^2; %输出层的输出的一阶导
end
for i=1:1:3
delta3(i)=u(5)*dyu*epid(i)*dK(i); %输出层的delta
end
for j=1:1:3
for i=1:1:5
d_wo=xite*delta3(j)*Oh(i)+alfa*(wo_1-wo_2);
end
end
% 隐含层-输出层的加权系数的调整
wo=wo_1+d_wo;
%以下是输入层至隐含层的权值调整
for i=1:1:5
dO(i)=4/(exp(I(i))+exp(-I(i)))^2;%(1*5矩阵)
end
segma=delta3*wo;%(1*5矩阵,行向量)
delta2 = dO.*segma;
d_wi = delta2'*xi+alfa*(wi_1-wi_2);
% 输入层-隐含层的加权系数调整
wi=wi_1+d_wi;
% 这里猜测存储的是历史信息?
wo_3=wo_2;
wo_2=wo_1;
wo_1=wo;%储存输出层本次调整后的权值
wi_3=wi_2;
wi_2=wi_1;
wi_1=wi;%储存隐层本次调整后的权值
Kp=K(1);Ki=K(2);Kd=K(3);
sys=[u_k,Kp,Ki,Kd];
S函数完整代码附录
% 有个疑惑,到底是什么在选择flag?为什么这里没有主函数?
function [sys,x0,str,ts]=my_exppidf(t,x,u,flag)
switch flag,
case 0,
[sys,x0,str,ts]=mdlInitializeSizes;
case 2,
sys=mdlUpdates(x,u);
case 3,
sys=mdlOutputs(t,x,u);
case {1,4,9},
sys=[];
otherwise
error(['unhandled flag=',num2str(flag)]);%异常处理
end
% 模型初始化
function[sys,x0,str,ts]=mdlInitializeSizes
sizes=simsizes;%用于设置模块参数的结构体用simsizes来生成
sizes.NumContStates=0;%模块连续状态变量的个数
sizes.NumDiscStates=3;%模块离散状态变量的个数
sizes.NumOutputs=4;%模块输出变量的个数
sizes.NumInputs=7;%模块输入变量的个数
sizes.DirFeedthrough=1;%模块是否存在直接贯通,1表示存在直接贯通,若为0,则mdlOutputs函数里不能有u
sizes.NumSampleTimes=1;%模块的采样时间个数,至少是一个
sys=simsizes(sizes);%设置完后赋给sys输出
x0=zeros(3,1);%系统状态变量设置
str=[];
ts=[0 0];%采样周期设为0表示是连续系统,
% ts=[0.001 0];%采样周期设为0表示是连续系统,
function sys=mdlUpdates(x,u)
T=0.001;
x=[u(5);x(2)+u(5)*T;(u(5)-u(4))/T];%3个状态量(偏差、偏差和以及偏差变化量),u(5)是偏差,u(4)是上一次的偏差,x(2)则是之前的偏差和
sys=[x(1);x(2);x(3)];
function sys=mdlOutputs(t,x,u)
xite=0.2;
alfa=0.05;
IN=3;H=5;OUT=3;
wi=rand(5,3);%产生一个5*3的随机数矩阵,随机数在(0,1)区间
wi_1=wi;wi_2=wi;wi_3=wi;
wo=rand(3,5);
wo_1=wo;wo_2=wo;wo_3=wo;
Oh=zeros(5,1);%产生一个1*5的零矩阵(行矩阵)
I=Oh;
xi=[u(1),u(3),u(5)];%神经网络训练的3个输入,期望值、误差以及实际值
epid=[x(1);x(2);x(3)];%3个状态变量(偏差、偏差和、偏差变化量)(3*1矩阵,列向量)
I=xi*wi';%隐层的输入
for j=1:1:5
Oh(j)=(exp(I(j))-exp(-I(j)))/(exp(I(j))+exp(-I(j)));%隐层的输出值(1*5矩阵)行矩阵
end
K1=wo*Oh;%输出层的输入(3*1矩阵)
for i=1:1:3
K(i)=exp(K1(i))/(exp(K1(i))+exp(-K1(i)));%得到输出层的输出(KP、KI、KD)(1*3矩阵,行向量)
end
u_k=K*epid;%计算得到控制律u,1个值
%%以下是权值调整
%隐含层至输出层的权值调整
dyu=sign((u(3)-u(2))/(u(7)-u(6)+0.0001));
for j=1:1:3
dK(j)=2/(exp(K1(j))+exp(-K1(j)))^2; %输出层的输出的一阶导
end
for i=1:1:3
delta3(i)=u(5)*dyu*epid(i)*dK(i); %输出层的delta
end
for j=1:1:3
for i=1:1:5
d_wo=xite*delta3(j)*Oh(i)+alfa*(wo_1-wo_2);
end
end
wo=wo_1+d_wo;
%以下是输入层至隐含层的权值调整
for i=1:1:5
dO(i)=4/(exp(I(i))+exp(-I(i)))^2;%(1*5矩阵)
end
segma=delta3*wo;%(1*5矩阵,行向量)
delta2 = dO.*segma;
d_wi = delta2'*xi+alfa*(wi_1-wi_2);
wi=wi_1+d_wi;
wo_3=wo_2;
wo_2=wo_1;
wo_1=wo;%储存输出层本次调整后的权值
wi_3=wi_2;
wi_2=wi_1;
wi_1=wi;%储存隐层本次调整后的权值
Kp=K(1);Ki=K(2);Kd=K(3);
sys=[u_k,Kp,Ki,Kd];
完整simulink模型(建议使用MATLAB2016b或更高版本)+S函数工程文件+原论文和思维导图xmind下载:
基于S函数的BP神经网络PID控制器及Simulink仿真和对应代码模型.zip
压缩包截图
