MIT 18.06 +线性代数的几何意义+3Blue1Brown 笔记
第一节 线性映射与线性变换
-
线性函数:初等 f ( x ) = k x f ( x ) = k x f(x)=kx,满足可加性与比例行,几何意义为一条直线;高等线性函数:扩展初等线性函数, f ( x 1 , x 2 , ⋯ , x n ) = k 1 x 1 + k 2 x 2 + ⋯ + k n x n f(x_1,x_2,\cdots,x_n) = k_1 x_1+k_2 x_2+\cdots +k_n x_n f(x1,x2,⋯,xn)=k1x1+k2x2+⋯+knxn,几何意义为超平面。
-
线性映射: T : x → y , x ↦ k x T: \boldsymbol{x} \rightarrow \boldsymbol{y}, \boldsymbol{x} \mapsto k \boldsymbol{x} T:x→y,x↦kx表示从自变量数的集合 x \boldsymbol x x到因变量数的集合 y \boldsymbol y y的映射(一个动作),其中 T T T称为线性算子;满足线性的可加性和比例性( T ( α ⃗ + β ⃗ ) = T α ⃗ + T β ⃗ T ( \vec \alpha + \vec \beta) =T\vec \alpha + T \vec \beta T(α+β)=Tα+Tβ和 T ( k α ⃗ ) = k T α ⃗ T(k\vec \alpha) = kT\vec \alpha T(kα)=kTα);将 n n n维向量 x x x从一个 n n n维子空间映射到另一个 m m m维子空间。下图中两个二维子空间,不需要坐标系对齐,只需要原点重合即可。

-
线性变换:如果映射是发生在一个集合上的同一个坐标系中,线性映射就被称为线性变换。比如:旋转、投影。 A n × n ⋅ x n × 1 = b n × 1 A_{n \times n} \cdot x_{n\times1}=b_{n\times 1} An×n⋅xn×1=bn×1 将 n n n维空间中的一个向量映射到自身空间中另一个向量。

-
线性代数里面的线性主要是指线性空间里面的线性变换(可加性和比例性),通过线性算子定义了线性变换,也就是变换满足可加性和比例性。
理解:这里的线性映射和线性变换都是将矩阵 A m × n A_{m \times n} Am×n看作一个变换矩阵(每一列都是基变换后的位置),矩阵的列空间(行空间)是 R m R^m Rm( R n R^n Rn)的一个子空间,都是线性(向量)空间, A x Ax Ax就是对向量 x x x进行线性变换(线性映射),等价于对 x x x向量进行旋转缩放(线性变换的本质就是旋转缩放)变换到矩阵的列空间。故是线性空间(向量空间)里的线性变换(线性映射)。
第二节 向量的基本几何意义
-
向量:有方向、有大小的量;物理意义,小船过河每点均可表示位移等;大小相等、方向相同的两个向量相等。用有序数组表示 a ⃗ = ( a 1 , a 2 , a 3 ) \vec{a}=(a_1,a_2,a_3) a=(a1,a2,a3),或分解为 n n n个单位坐标向量的线性表示 ( x , y , z ) = x i + y j + z k (x, y, z)=x i+y \boldsymbol{j}+z \boldsymbol{k} (x,y,z)=xi+yj+zk。
-
向量的加法: a + b = ( a x + b x , a y + b y , a z + b z ) \boldsymbol{a}+\boldsymbol{b}=\left(a_{x}+b_{x}, a_{y}+b_{y}, a_{z}+b_{z}\right) a+b=(ax+bx,ay+by,az+bz) ,减法是加法的特例 a − b = a + ( − b ) a-b=a+(-b) a−b=a+(−b);几何意义,平行四边形法则,三角形法则;物理意义,船过河,马力驱动得到的位移与水流对船的位移的合成符合四边形法则和三角形法则
-
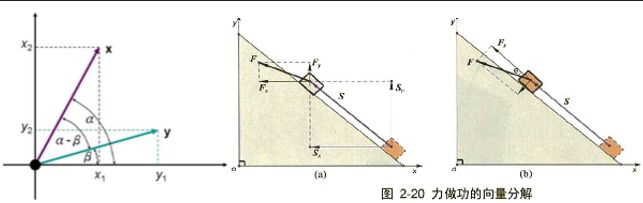
向量内积: a ⃗ ⋅ b ⃗ = ∣ a ∣ ∣ b ∣ cos θ a ⃗ ⋅ b ⃗ = a x b x + a y b y \vec{a} \cdot \vec{b}= |a|| b| \cos \theta \quad \vec{a} \cdot \vec{b} = a_{x} b_{x}+a_{y} b_{y} a⋅b=∣a∣∣b∣cosθa⋅b=axbx+ayby,且两个定义等价 a ⃗ ⋅ b ⃗ = a x b x + a y b y = ∣ a ⃗ ∣ c o s α ∣ b ⃗ ∣ c o s β + ∣ a ⃗ ∣ s i n α ∣ b ⃗ ∣ s i n β = ∣ a ⃗ ∣ ∣ b ⃗ ∣ ( c o s α c o s β + s i n α s i n β ) = ∣ a ⃗ ∣ ∣ b ⃗ ∣ c o s ( α − β ) = ∣ a ⃗ ∣ ∣ b ⃗ ∣ c o s ( θ ) \begin{array}{l} \vec{a} \cdot \vec{b} = a_{x} b_{x}+a_{y} b_{y} = |\vec{a}|cos \alpha |\vec{b}|cos \beta+|\vec{a}|sin \alpha |\vec{b}|sin \beta = |\vec{a}||\vec{b}|(cos \alpha cos \beta+sin \alpha sin \beta) = |\vec{a}||\vec{b}|cos(\alpha-\beta) = |\vec{a}||\vec{b}|cos(\theta) \end{array} a⋅b=axbx+ayby=∣a∣cosα∣b∣cosβ+∣a∣sinα∣b∣sinβ=∣a∣∣b∣(cosαcosβ+sinαsinβ)=∣a∣∣b∣cos(α−β)=∣a∣∣b∣cos(θ);几何意义,一个向量在另一个向量上的投影的积,内积值越大,两个向量的在方向上就越接近,内积值越小,两个向量的在方向上就越相反,内积值为0,两向量垂直;物理意义,力做功 W = F x S x + F y S y W = F s S = F S cos θ W=F_{x} S_{x}+F_{y} S_{y}\quad W=F_{s} S=F S \cos \theta W=FxSx+FySyW=FsS=FScosθ
以线性变换观点看点积:为什么点积的运算是对应坐标相乘并结果相加,和投影有什么关系?
两个向量的点积从线性变换角度看,相当于一个线性变换将多维空间向量变换到一维空间然后进行缩放。理解 a b ab ab点积可分为两步,第一步首先 a a a除以向量的模为单位向量, a a a向量所在的直线为一维空间,可看作 b b b从多维空间到一维空间的线性变换,这个线性变换,第一列为 i i i变换后位置,第二列为 j j j变换后为位置, 乘以向量 b b b,就是对 b b b进行线性变换到子空间上,几何意义上就是 b b b的投影长度;第二步,再对 b b b的投影进行缩放 a a a的模的倍数,则相当于 a a a向量的模乘以 b b b投影的模的长度。
画出二维空间一个一维子空间,其单位向量为 u u u,空间内的所有向量投影到该直线上(一维子空间上)。
则存在一个投影矩阵 u = [ u x , u y ] u=[u_x,u_y] u=[ux,uy],第一列为 i i i投影到子空间的位置,第二列表示 j j j投影到子空间的位置。现在需要计算 u x u_x ux与 u y u_y uy: u u u模长为1,由图可看出 u x 2 + u y 2 = 1 u_x^2+u_y^2=1 ux2+uy2=1
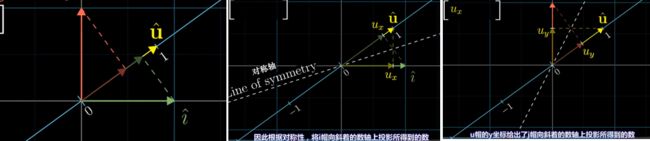
空间中任意向量经过投影矩阵投影:发现通过投影计算与点积计算完全相同。

假设 u u u非单位向量,为任意向量,例如放大为原来的三倍。(不可能对 u x u_x ux和 u y u_y uy分别放大,分别放大则改变了子空间),也就是让 u u u变为子空间上任意一个向量。等价于将任意向量向子空间上投影,然后乘以 u u u放大的倍数。即投影矩阵的作用就可以理解为投影和伸缩!!!!
因此,对一个向量向另外一个单位向量上投影,再进行伸缩,就得到两个向量的点积。
对这里而言,**一个向量的对偶是它定义的线性变换!**一个多维空间到一维空间的对偶是多维空间中的某个向量。
-
向量外积:
-
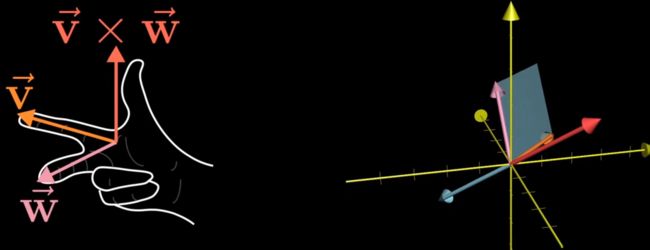
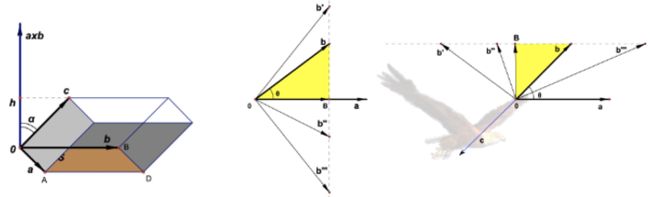
定义式: a ⃗ × b ⃗ = ∣ a ⃗ ∣ ∣ b ⃗ ∣ sin θ n 0 ⃗ \vec{a} \times \vec{b}=|\vec{a}||\vec{b}| \sin \theta \vec{n_0} a×b=∣a∣∣b∣sinθn0,其中单位向量 n 0 ⃗ \vec{n_0} n0的方向规定满足右手法则, a × b a \times b a×b,**根据右手法则,四指指向向量 a a a,弯曲指向向量 b b b,大拇指方向即为叉乘结果方向,根据右手法则向上为正,向下为负,向外为正,向里为负。**叉积仅定义在三维空间中! a ⃗ × b ⃗ = − b ⃗ × a ⃗ \vec{a} \times \vec{b}=-\vec{b} \times \vec{a} a×b=−b×a
-
计算式: a ⃗ × b ⃗ = ( a y b z − a z b y , a z b x − a x b z , a x b y − a y b x ) \vec{a} \times \vec{b}=\left(a_{y} b_{z}-a_{z} b_{y}, a_{z} b_{x}-a_{x} b_{z}, a_{x} b_{y}-a_{y} b_{x}\right) a×b=(aybz−azby,azbx−axbz,axby−aybx)。
证: a × b = ( a x i + a y j + a z k ) × ( b x i + b y j + b z k ) = a x i × ( b x i + b y j + b z k ) + a y j × ( b x i + b y j + b z k ) + a z k × ( b x i + b y j + b z k ) = a x b x ( i × i ) + a x b y ( i × j ) + a x b z ( i × k ) + a y b x ( j × i ) + a y b y ( j × j ) + a y b z ( j × k ) + a z b x ( k × i ) + a z b y ( k × j ) + a z b z ( k × k ) \mathbf{a} \times \mathbf{b}=\left(a_{x} \mathbf{i}+a_{y} \mathbf{j}+a_{z} \mathbf{k}\right) \times\left(b_{x} \mathbf{i}+b_{y} \mathbf{j} +b_{z} \mathbf{k}\right) = a_{x} \mathbf{i} \times\left(b_{x} \mathbf{i}+b_{y} \mathbf{j} +b_{z} \mathbf{k}\right)+a_{y} \mathbf{j} \times\left(b_{x} \mathbf{i}+b_{y} \mathbf{j} +b_{z} \mathbf{k}\right)+a_{z} \mathbf{k} \times\left(b_{x} \mathbf{i}+b_{y} \mathbf{j} +b_{z} \mathbf{k}\right) \\ = a_{x} b_{x}(\mathbf{i} \times \mathbf{i})+a_{x} b_{y}(\mathbf{i} \times \mathbf{j})+a_{x} b_{z}(\mathbf{i} \times \mathbf{k})+ a_{y} b_{x}(\mathbf{j} \times \mathbf{i})+a_{y} b_{y}(\mathbf{j} \times \mathbf{j})+a_{y} b_{z}(\mathbf{j} \times \mathbf{k})+ a_{z} b_{x}(\mathbf{k} \times \mathbf{i})+a_{z} b_{y}(\mathbf{k} \times \mathbf{j})+a_{z} b_{z}(\mathbf{k} \times \mathbf{k}) a×b=(axi+ayj+azk)×(bxi+byj+bzk)=axi×(bxi+byj+bzk)+ayj×(bxi+byj+bzk)+azk×(bxi+byj+bzk)=axbx(i×i)+axby(i×j)+axbz(i×k)+aybx(j×i)+ayby(j×j)+aybz(j×k)+azbx(k×i)+azby(k×j)+azbz(k×k)
其中: i × i = j × j = k × k = 0 \mathbf{i} \times \mathbf{i}=\mathbf{j} \times \mathbf{j}=\mathbf{k} \times \mathbf{k}=\mathbf{0} i×i=j×j=k×k=0, i × j = k \mathbf{i} \times \mathbf{j}=\mathbf{k} i×j=k, j × k = i , k × i = j \mathbf{j} \times \mathbf{k}=\mathbf{i}, \mathbf{k} \times \mathbf{i}=\mathbf{j} j×k=i,k×i=j, j × i = − k , k × j = − i , i × k = − j \mathbf{j} \times \mathbf{i}=-\mathbf{k}, \mathbf{k} \times \mathbf{j}=-\mathbf{i}, \mathbf{i} \times \mathbf{k}=-\mathbf{j} j×i=−k,k×j=−i,i×k=−j 符合右手法则
故: a × b = ( a y b z − a z b y ) i + ( a z b x − a x b z ) j + ( a x b y − a y b x ) k = ( a y b z − a z b y , a z b x − a x b z , a x b y − a y b x ) \begin{aligned} \mathbf{a} \times \mathbf{b} &=\left(a_{y} b_{z}-a_{z} b_{y}\right) \mathbf{i}+\left(a_{z} b_{x}-a_{x} b_{z}\right) \mathbf{j}+\left(a_{x} b_{y}-a_{y} b_{x}\right) \mathbf{k} =\left(a_{y} b_{z}-a_{z} b_{y}, a_{z} b_{x}-a_{x} b_{z}, a_{x} b_{y}-a_{y} b_{x}\right) \end{aligned} a×b=(aybz−azby)i+(azbx−axbz)j+(axby−aybx)k=(aybz−azby,azbx−axbz,axby−aybx)
可验证: ∣ ( a y b z − a z b y , a z b x − a x b z , a x b y − a y b x ) ∣ |\left(a_{y} b_{z}-a_{z} b_{y}, a_{z} b_{x}-a_{x} b_{z}, a_{x} b_{y}-a_{y} b_{x}\right) | ∣(aybz−azby,azbx−axbz,axby−aybx)∣= ∣ a ⃗ ∣ ∣ b ⃗ ∣ s i n θ |\vec{a}||\vec{b}|sin \theta ∣a∣∣b∣sinθ
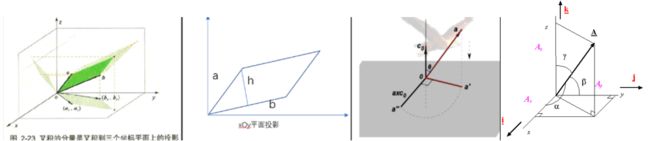
( a y b z − a z b y , a z b x − a x b z , a x b y − a y b x ) \left(a_{y} b_{z}-a_{z} b_{y}, a_{z} b_{x}-a_{x} b_{z}, a_{x} b_{y}-a_{y} b_{x}\right) (aybz−azby,azbx−axbz,axby−aybx)除去其长度为单位向量,且垂直于 a a a、 b b b生成的平面,即为 n 0 ⃗ = ( c o s α , c o s β , c o s γ ) \vec{n_0}=(cos \alpha,cos \beta,cos \gamma) n0=(cosα,cosβ,cosγ),由此可知定义式与计算式一致!
- 由计算式可看出,叉积 x x x方向的分量由向量 a a a 和 b \boldsymbol{b} b 在 y o z y o z yoz 平面上的投影四边形;类似地, a × b \boldsymbol{a} \times \boldsymbol{b} a×b 的 y y y 方向的分量由向量 a \boldsymbol{a} a和 b b b 在 x o z x o z xoz 平面上的投影四边形, a × b a \times b a×b 的 z z z 方向的分量由向量 a a a 和 b b b 在 x o y x o y xoy 平面上的投影四边形。
证明:向量 a a a、 b b b在 x O y xOy xOy平面投影坐标分别为 ( a x , a y ) (a_x,a_y) (ax,ay)与 ( b x , b y ) (b_x,b_y) (bx,by),证明 ( a x , a y ) × ( b x , b y ) = a x b y − a y b x \left(a_{x}, a_{y}\right) \times\left(b_{x}, b_{y}\right)=a_{x} b_{y}-a_{y} b_{x} (ax,ay)×(bx,by)=axby−aybx为在 x O y xOy xOy平面投影的平行四边形的面积。
平行四边行的底: ∣ b ⃗ ∣ = b x 2 + b y 2 |\vec{b}|=\sqrt{b_x^2+b_y^2} ∣b∣=bx2+by2 平行四边形的高 h h h为点到线的距离: b b b向量所在直线方程可表示为 b y x − b x y = 0 b_yx-b_xy=0 byx−bxy=0,由点到线距离公式 h = ∣ b y a x − b x a y ∣ b x 2 + b y 2 h=\frac{|b_ya_x-b_xa_y|}{\sqrt{b_x^2+b_y^2}} h=bx2+by2∣byax−bxay∣
平行四边形面积: ∣ b ⃗ ∣ h = ∣ b y a x − b x a y ∣ |\vec{b}|h=|b_ya_x-b_xa_y| ∣b∣h=∣byax−bxay∣,将 b y a x − b x a y b_ya_x-b_xa_y byax−bxay表示为 ( a x , a y ) \left(a_{x}, a_{y}\right) (ax,ay) 和 ( b x , b y ) \left(b_{x}, b_{y}\right) (bx,by) 的叉积。**注意:**叉积只定义在三维空间,因此这里可理解为 ( a x , a y , 0 ) \left(a_{x}, a_{y},0\right) (ax,ay,0) 和 ( b x , b y , 0 ) \left(b_{x}, b_{y},0\right) (bx,by,0) 的叉积
-
叉乘的行列式表示法:由上式可知 a × b = ( a y b z − a z b y ) i + ( a z b x − a x b z ) j + ( a x b y − a y b x ) k = ∣ a y a z b y b z ∣ i − ∣ a x a z b x b z ∣ j + ∣ a x a y b x b z ∣ k = ∣ i j k a x a y a z b x b y b z ∣ \begin{aligned} \mathbf{a} \times \mathbf{b} &=\left(a_{y} b_{z}-a_{z} b_{y}\right) \mathbf{i}+\left(a_{z} b_{x}-a_{x} b_{z}\right) \mathbf{j}+\left(a_{x} b_{y}-a_{y} b_{x}\right) \mathbf{k} =\left|\begin{array}{ll} a_{y} & a_{z} \\ b_{y} & b_{z} \end{array}\right| \mathbf{i}-\left|\begin{array}{ll} a_{x} & a_{z} \\ b_{x} & b_{z} \end{array}\right| \mathbf{j}+\left|\begin{array}{ll} a_{x} & a_{y} \\ b_{x} & b_{z} \end{array}\right| \mathbf{k} \end{aligned} \\=\left|\begin{array}{ccc}\mathbf{i} & \mathbf{j} & \mathbf{k} \\ a_{x} & a_{y} & a_{z} \\ b_{x} & b_{y} & b_{z}\end{array}\right| a×b=(aybz−azby)i+(azbx−axbz)j+(axby−aybx)k=∣∣∣∣aybyazbz∣∣∣∣i−∣∣∣∣axbxazbz∣∣∣∣j+∣∣∣∣axbxaybz∣∣∣∣k=∣∣∣∣∣∣iaxbxjaybykazbz∣∣∣∣∣∣
-
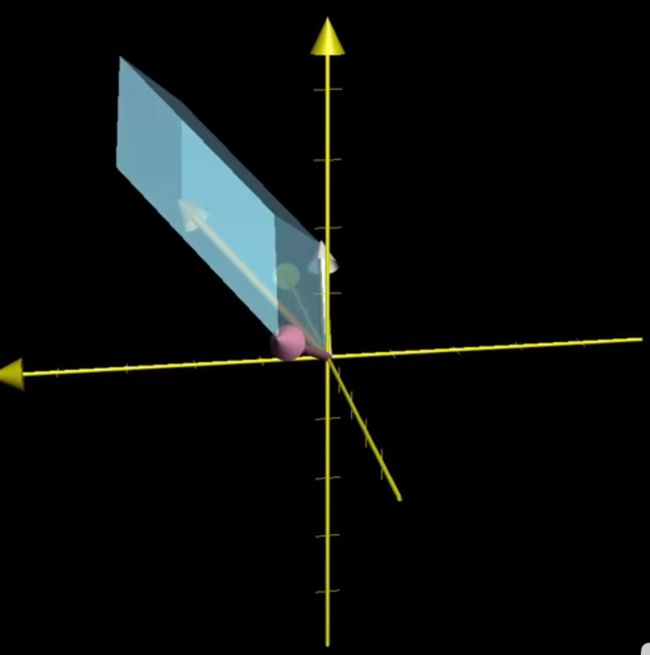
几何意义:由定义式可看出,叉积结果为 a ⃗ \vec a a,$ \vec b$构成的平行四边形的有向面积。
-
物理意义:如 v ⃗ = ω ⃗ × r ⃗ \vec v = \vec \omega \times \vec r v=ω×r。
-
绘图: a ⃗ × c ⃗ 0 \vec a \times \vec c_0 a×c0的图形绘制( c ⃗ 0 \vec c_0 c0为单位向量):“一投一转”。大小: ∣ a ⃗ ∣ ∣ c 0 ⃗ ∣ s i n θ = ∣ a ⃗ ∣ s i n θ |\vec{a}||\vec{c_0}|sin \theta=|\vec a|sin \theta ∣a∣∣c0∣sinθ=∣a∣sinθ,方向:旋转90度
叉积与行列式的关系:
总结:叉积结果是一个向量,向量的模为两个向量组成的平行四边形的面积,不管对于二维空间(其实也假设在三维空间)还是三维空间,叉积结果都有两个方向且方向相反,具体使用哪一个方向是根据有向面积的正负决定的,叉积顺序符合右手法则(右手法则是正交的 i 、 j 、 k i、j、k i、j、k,注意叉积结果 k k k的方向是否改变),定向未改变,选择符合右手法则的方向作为叉积结果,不符合右手法则说明定向改变,选择符合右手法则的反方向。
在二维空间,有两个向量 v → \overrightarrow{\mathrm{v}} v, w → \overrightarrow{\mathrm{w}} w,考虑它们张成的平行四边形。二阶行列式表示的的是两个二维向量围成的有向面积(方向根据从变换角度看 i i i和 j j j的位置关系), v v v是 i i i变换后的位置, w w w是 j j j变换后的位置,**与标准正交基做对比,发现定向发生改变,**故有向面积为负值,等价于使用右手定则,大拇指指向正 k k k方向(向外为正),行列式为正,大拇指指向 k k k负向(平面立面),行列式为负数。
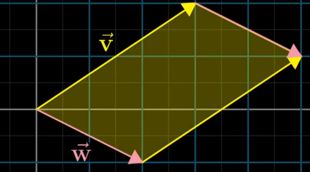
v → × w → \overrightarrow{\mathrm{v}} \times \overrightarrow{\mathrm{w}} v×w也表示平行四边形的有向面积,方向存在两种可能,根据右手法则确定叉积方向。因此叉乘与二阶行列式的几何意义一致。 v → × w → = det ( [ 3 2 1 − 1 ] ) \overrightarrow{\mathrm{v}} \times \overrightarrow{\mathrm{w}}=\operatorname{det}\left(\left[\begin{array}{cc}3 & 2 \\ 1 & -1\end{array}\right]\right) v×w=det([312−1]) , v v v所表示的向量作为第一列, w w w所表示的向量作为第二列。矩阵 [ 3 2 1 − 1 ] \left[\begin{array}{cc}3 & 2 \\ 1 & -1\end{array}\right] [312−1]第一列就是 i i i线性变换后的位置,第二列就是 j j j线性变换后的位置,这里若 i i i与 j j j的定向发生改变,则行列式为负,否则为正。行列式的值就是所围成面积的值。
真正的叉积定义在三维空间,叉积方向垂直于所围成的平行四边形,垂直于平行四边形的所在平面有两个方向相反的向量,可以从行列式角度根据线性变换确定定向是否改变确定方向,等价于采用右手法则决定选择叉积结果的方向(满足右手法则,说明 i 、 j 、 k i、j、k i、j、k相对位置没有发生改变)。因此得到叉积结果的单位向量后,乘以面积则为叉积结果。
以线性变换观点看叉积:证明行列式计算叉积的结果具有几何解释
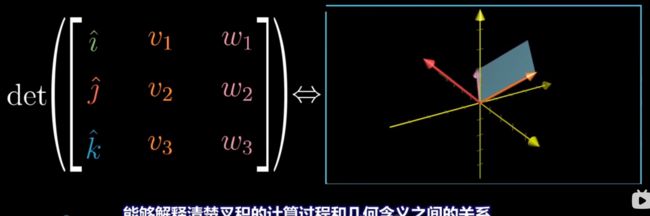
[ v 1 v 2 v 3 ] × [ w 1 w 2 w 3 ] = det ( [ ı ^ v 1 w 1 ȷ ^ v 2 w 2 k ^ v 3 w 3 ] ) \left[\begin{array}{l}v_{1} \\ v_{2} \\ v_{3}\end{array}\right] \times\left[\begin{array}{l}w_{1} \\ w_{2} \\ w_{3}\end{array}\right]=\operatorname{det}\left(\left[\begin{array}{lll}\hat{\imath} & v_{1} & w_{1} \\ \hat{\jmath} & v_{2} & w_{2} \\ \hat{k} & v_{3} & w_{3}\end{array}\right]\right) ⎣⎡v1v2v3⎦⎤×⎣⎡w1w2w3⎦⎤=det⎝⎛⎣⎡ı^ȷ^k^v1v2v3w1w2w3⎦⎤⎠⎞按照第一列展开可表示为:
ı ^ ( v 2 w 3 − v 3 w 2 ) + ȷ ^ ( v 3 w 1 − v 1 w 3 ) + k ^ ( v 1 w 2 − v 2 w 1 ) \hat{\imath}\left(v_{2} w_{3}-v_{3} w_{2}\right)+\hat{\jmath}\left(v_{3} w_{1}-v_{1} w_{3}\right)+\hat{k}\left(v_{1} w_{2}-v_{2} w_{1}\right) ı^(v2w3−v3w2)+ȷ^(v3w1−v1w3)+k^(v1w2−v2w1)解释叉积的计算过程和几何含义之间的关系:
第一步:首先根据向量 v v v和 w w w定义一个从三维空间到数轴的特定线性变换
det ( [ u 1 v 1 w 1 u 2 v 2 w 2 u 3 v 3 w 3 ] ) \operatorname{det}\left(\left[\begin{array}{ccc}u_{1} & v_{1} & w_{1} \\ u_{2} & v_{2} & w_{2} \\ u_{3} & v_{3} & w_{3}\end{array}\right]\right) det⎝⎛⎣⎡u1u2u3v1v2v3w1w2w3⎦⎤⎠⎞ 表示的是三个向量所围成的有向面积。
f ( [ x y z ] ) = det ( [ x v 1 w 1 y v 2 w 2 z v 3 w 3 ] ) f\left(\left[\begin{array}{l}x \\ y \\ z\end{array}\right]\right)=\operatorname{det}\left(\left[\begin{array}{lll}x & v_{1} & w_{1} \\ y & v_{2} & w_{2} \\ z & v_{3} & w_{3}\end{array}\right]\right) f⎝⎛⎣⎡xyz⎦⎤⎠⎞=det⎝⎛⎣⎡xyzv1v2v3w1w2w3⎦⎤⎠⎞ 则表示一个从三维空间到数轴的函数(线性变换)。 给定一个向量得到行列式所围成的有向面积。这个函数为什么是线性的?因为三阶行列式表示的是平行六面体有向体积。即底面积不变,高是线性变化的,因此函数是线性函数,函数值在随高的变化是等间距的,固为线性函数。
第二步:找到它的对偶向量
从三维映射到一维,根据对偶的思想,存在一个一行三列的变换矩阵,作点积求得投影的面积值。
函数 f ( [ x y z ] ) = det ( [ x v 1 w 1 y v 2 w 2 z v 3 w 3 ] ) f\left(\left[\begin{array}{l}x \\ y \\ z\end{array}\right]\right)=\operatorname{det}\left(\left[\begin{array}{lll}x & v_{1} & w_{1} \\ y & v_{2} & w_{2} \\ z & v_{3} & w_{3}\end{array}\right]\right) f⎝⎛⎣⎡xyz⎦⎤⎠⎞=det⎝⎛⎣⎡xyzv1v2v3w1w2w3⎦⎤⎠⎞ 可表示为 [ p 1 p 2 p 3 ] ⋅ [ x y z ] = det ( [ x v 1 w 1 y v 2 w 2 z v 3 w 3 ] ) \left[\begin{array}{l}p_{1} \\ p_{2} \\ p_{3}\end{array}\right] \cdot\left[\begin{array}{l}x \\ y \\ z\end{array}\right]=\operatorname{det}\left(\left[\begin{array}{lll}x & v_{1} & w_{1} \\ y & v_{2} & w_{2} \\ z & v_{3} & w_{3}\end{array}\right]\right) ⎣⎡p1p2p3⎦⎤⋅⎣⎡xyz⎦⎤=det⎝⎛⎣⎡xyzv1v2v3w1w2w3⎦⎤⎠⎞
左边是点乘展开,右边按照行列式第一列展开:
p 1 ⋅ x + p 2 ⋅ y + p 3 ⋅ z = x ( v 2 ⋅ w 3 − v 3 ⋅ w 2 ) + y ( v 3 ⋅ w 1 − v 1 ⋅ w 3 ) + z ( v 1 ⋅ w 2 − v 2 ⋅ w 1 ) p_{1} \cdot x+p_{2} \cdot y+p_{3} \cdot z=\begin{array}{l} x\left(v_{2} \cdot w_{3}-v_{3} \cdot w_{2}\right)+ y\left(v_{3} \cdot w_{1}-v_{1} \cdot w_{3}\right)+ z\left(v_{1} \cdot w_{2}-v_{2} \cdot w_{1}\right) \end{array} p1⋅x+p2⋅y+p3⋅z=x(v2⋅w3−v3⋅w2)+y(v3⋅w1−v1⋅w3)+z(v1⋅w2−v2⋅w1)
(从这里也可以看出,三阶行列式的几何意义就是 a × b ∗ c a \times b * c a×b∗c)
因此 p 1 = v 2 ⋅ w 3 − v 3 ⋅ w 2 ; p 2 = v 3 ⋅ w 1 − v 1 ⋅ w 3 ; p 3 = v 1 ⋅ w 2 − v 2 ⋅ w 1 p_{1}=v_{2} \cdot w_{3}-v_{3} \cdot w_{2}; p_{2}=v_{3} \cdot w_{1}-v_{1} \cdot w_{3}; p_{3}=v_{1} \cdot w_{2}-v_{2} \cdot w_{1} p1=v2⋅w3−v3⋅w2;p2=v3⋅w1−v1⋅w3;p3=v1⋅w2−v2⋅w1
这里的 x x x其实就是 i i i上的坐标, y y y就是 j j j上的坐标, z z z就是 k k k上的坐标。
第三步:证明这个对偶向量 p p p就是 v v v和 w w w的叉积
[ p 1 p 2 p 3 ] ⋅ [ x y z ] = det ( [ x v 1 w 1 y v 2 w 2 z v 3 w 3 ] ) \left[\begin{array}{l}p_{1} \\ p_{2} \\ p_{3}\end{array}\right] \cdot\left[\begin{array}{l}x \\ y \\ z\end{array}\right]=\operatorname{det}\left(\left[\begin{array}{lll}x & v_{1} & w_{1} \\ y & v_{2} & w_{2} \\ z & v_{3} & w_{3}\end{array}\right]\right) ⎣⎡p1p2p3⎦⎤⋅⎣⎡xyz⎦⎤=det⎝⎛⎣⎡xyzv1v2v3w1w2w3⎦⎤⎠⎞ 结果是三个向量确定的平行六面体的有向体积。
向量 p p p与其他向量点乘就是将其他向量投影到 p p p上,将投影长度与 p p p的长度相乘。
右侧从行列式的展开式看,首先获得由v和w确定的平行四边形的面积,乘以向量(x, y, z)在垂直于平行四边形方向上的分量 ( 不是(x, y, z)的长度 )。换句话说,找到的线性函数对于给定向量的作用是将这个向量投影到垂直于v和w的直线上,然后将投影长度与v和w张成的平行四边形的面积相乘。 这和垂直于v和w且长度为平行四边形面积的向量与 ( x , y , z ) (\mathrm{x}, \mathrm{y}, \mathrm{z}) (x,y,z) 点乘是同一回事。

因此证明找到的向量 p p p与 x x x点乘就是行列式的值。同时也满足下式:
[ v 1 v 2 v 3 ] × [ w 1 w 2 w 3 ] = det ( [ ı ^ v 1 w 1 ȷ ^ v 2 w 2 k ^ v 3 w 3 ] ) = ı ^ ( v 2 w 3 − v 3 w 2 ) + ȷ ^ ( v 3 w 1 − v 1 w 3 ) + k ^ ( v 1 w 2 − v 2 w 1 ) \left[\begin{array}{l}v_{1} \\ v_{2} \\ v_{3}\end{array}\right] \times\left[\begin{array}{l}w_{1} \\ w_{2} \\ w_{3}\end{array}\right]=\operatorname{det}\left(\left[\begin{array}{lll}\hat{\imath} & v_{1} & w_{1} \\ \hat{\jmath} & v_{2} & w_{2} \\ \hat{k} & v_{3} & w_{3}\end{array}\right]\right)=\hat{\imath}\left(v_{2} w_{3}-v_{3} w_{2}\right)+\hat{\jmath}\left(v_{3} w_{1}-v_{1} w_{3}\right)+\hat{k}\left(v_{1} w_{2}-v_{2} w_{1}\right) ⎣⎡v1v2v3⎦⎤×⎣⎡w1w2w3⎦⎤=det⎝⎛⎣⎡ı^ȷ^k^v1v2v3w1w2w3⎦⎤⎠⎞=ı^(v2w3−v3w2)+ȷ^(v3w1−v1w3)+k^(v1w2−v2w1)
-
-
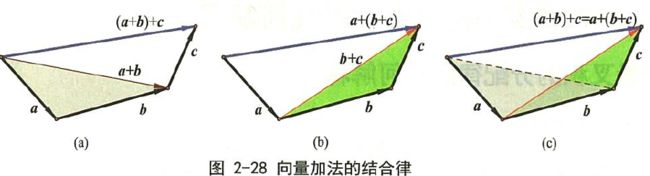
向量加法的结合律: ( a + b ) + c = a + ( b + c ) (\boldsymbol{a}+\boldsymbol{b})+\boldsymbol{c}=\boldsymbol{a}+(\boldsymbol{b}+\boldsymbol{c}) (a+b)+c=a+(b+c)
-
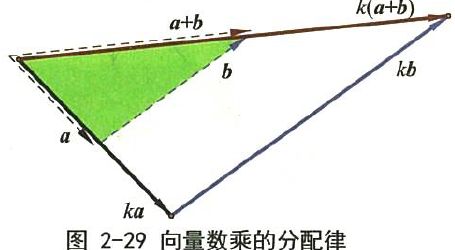
向量数乘的分配律: k ( a + b ) = k a + k b k(\boldsymbol{a}+\boldsymbol{b})=k \boldsymbol{a}+k \boldsymbol{b} k(a+b)=ka+kb
-
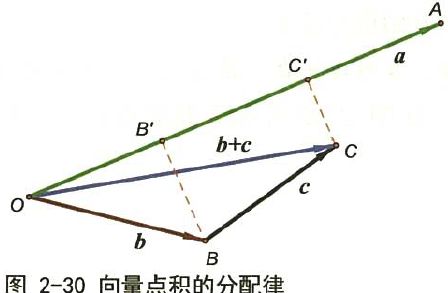
向量点积的分配律: a ⋅ ( b + c ) = a ⋅ b + a ⋅ c \boldsymbol{a} \cdot(\boldsymbol{b}+\boldsymbol{c})=\boldsymbol{a} \cdot \boldsymbol{b}+\boldsymbol{a} \cdot \boldsymbol{c} a⋅(b+c)=a⋅b+a⋅c (点积的几何意义,投影积)
-
向量叉积的分配律: ( a ⃗ + b ⃗ ) × c ⃗ = a ⃗ × c ⃗ + b ⃗ × c ⃗ (\vec{a}+\vec{b}) \times \vec{c}=\vec{a} \times \vec{c}+\vec{b} \times \vec{c} (a+b)×c=a×c+b×c “一投一转, 再加一伸”

-
向量的混合积: ( a ⃗ × b ⃗ ) ⋅ c ⃗ = ( b ⃗ × c ⃗ ) ⋅ a ⃗ = ( c ⃗ × a ⃗ ) ⋅ b ⃗ (\vec{a} \times \vec{b}) \cdot \vec{c}=(\vec{b} \times \vec{c}) \cdot \vec{a}=(\vec{c} \times \vec{a}) \cdot \vec{b} (a×b)⋅c=(b×c)⋅a=(c×a)⋅b a ⃗ × b ⃗ = ∣ a ∣ ∣ b ∣ s i n θ n 0 ⃗ \vec{a} \times \vec{b}=|a||b|sin \theta \vec{n_0} a×b=∣a∣∣b∣sinθn0是一个向量,其大小是围成的平行四边形的面积,故也成为有向面积,$ \vec{n_0} 再 点 乘 再点乘 再点乘c , 表 示 ,表示 ,表示c 向 向 向n_0 投 影 , 即 平 行 六 面 体 的 高 , 故 结 果 为 平 行 六 面 体 有 向 体 积 , 当 投影,即平行六面体的高,故结果为平行六面体有向体积,当 投影,即平行六面体的高,故结果为平行六面体有向体积,当n_0 与 与 与c$同侧为正,否则为负。
-
向量的积和张量之间的关系: a ⃗ , b ⃗ \vec{a}, \vec{b} a,b 的张量积:$ \vec{a} \vec{b}=a_{x} b_{x} \overrightarrow{i i}+a_{y} b_{y} \vec{j} \vec{j}+\left(a_{x} b_{y} \vec{i} j+a_{y} b_{x} \overrightarrow{j i}\right) , 其 第 一 部 分 包 含 了 , 其第一部分包含了 ,其第一部分包含了\vec{a} 和 和 和\vec{b}$内积的结果, 第二部分包含了 $\vec{a} $和 $ \vec{b} 外 积 或 行 列 式 的 结 果 , 即 : 外积或行列式的结果, 即: 外积或行列式的结果,即:\vec{a} \vec{b}=(\vec{a} \cdot \vec{b})+(\vec{a} \times \vec{b})$
第三节 向量组及向量空间
向量空间 R n R^n Rn,由全体包含 n n n个元素的向量构成,全体向量对数乘和加减运算(统称线性运算 a + b ∈ V a+b\in V a+b∈V, k a ∈ V ka\in V ka∈V即 k 1 a + k 2 b ∈ V k_1a+k_2b \in V k1a+k2b∈V)封闭。向量空间 R n R^n Rn的 n n n由向量中元素的个数决定(向量中有 n n n个元素,就存在 n n n个标准正交基),而其子空间的维数则由具体向量组的最大无关组的个数确定(最大无关组向量个数 r r r个则就可以构成 r r r个标准正交基)。
向量张成的空间定义:设有一个向量组 { α 1 , α 2 , … , α n } , \left\{\alpha_{1}, \alpha_{2}, \ldots, \alpha_{n}\right\}, {α1,α2,…,αn}, 这个向量组的所有的线性组合生成一个向量集合 span { α ⃗ 1 , α ⃗ 2 , ⋯ , α ⃗ n } = { x 1 α ⃗ 1 + x 2 α ⃗ 2 + ⋯ + x n α ⃗ n ∣ x 1 , x 2 , … , x n ∈ R } \operatorname{span}\left\{\vec{\alpha}_{1}, \vec{\alpha}_{2}, \cdots, \vec{\alpha}_{n}\right\}=\left\{x_{1} \vec{\alpha}_{1}+x_{2} \vec{\alpha}_{2}+\cdots+x_{n} \vec{\alpha}_{n} \mid x_{1}, x_{2}, \ldots, x_{n} \in \mathbb{R}\right\} span{α1,α2,⋯,αn}={x1α1+x2α2+⋯+xnαn∣x1,x2,…,xn∈R} 称为由 { α ⃗ 1 , α ⃗ 2 , ⋯ , α ⃗ n } \left\{\vec{\alpha}_{1}, \vec{\alpha}_{2}, \cdots, \vec{\alpha}_{n}\right\} {α1,α2,⋯,αn} 张成的向量空间。
若在 R 2 R^2 R2空间中,存在两个标准正交基 i i i和 j j j的线性组合可以表示空间内任意向量。若给定空间内任意两个不共线的向量(不相关)作为基,则它们的线性组合张成空间内任意向量;若给定空间内任意两个共线的向量(相关)作为基,则它们的线性组合张成空间内它们所在直线上的向量;若给定两个零向量,则仅能表示零点。
考虑 R 3 R^3 R3空间,在三维空间任取两个向量,若两个向量不共线,则张成一个过原点的一个平面;若两个向量共线,则张成一个过原点的一个直线。在三维空间任取三个向量,若三个向量不共面,则张成整个三维空间;若三个向量共面,则张成一个过原点的一个平面;若三个向量共线,则张成一个过原点的一个直线。
如果有多个向量,移除其中一个或者多个,或者说任何一个向量都不可以表示为其他向量的线性组合,则称向量组线性无关。
如果所有向量都未必给张成的空间增添了新的维度,移除其中一个或者多个,张成的空间不变,则称向量组线性相关。
向量空间 R n R^n Rn的子空间,无须包含 R n R^n Rn中的所有向量,但需要对线性运算封闭。零向量一定包含在向量空间 R n R^n Rn的任意子空间中,因为向量空间一定要对任意数乘封闭。换言之,如果某个向量组不包含零向量,则不能称之为子空间。 R 2 R^2 R2子空间包括: R 2 R^2 R2本身;过原点的一条直线;原点。 R 3 R^3 R3子空间包括: R 3 R^3 R3本身;过原点的一个平面;过原点的一条直线;原点。
向量空间的一组基定义:张成该空间的一个线性无关的向量集合。原因:从线性变换的角度考虑,每一个向量均为标准正交基变换后的位置,极大无关组张成的空间与向量组本身张成的空间是等价的。
基、维数及其坐标的几何意义
- 基、维数及其坐标定义:对于向量空间 V V V 中的一个有序向量组 { α 1 , α 2 , ⋯ , α n } \left\{\alpha_{1}, \alpha_{2}, \cdots, \alpha_{n}\right\} {α1,α2,⋯,αn} ,若满足: α 1 , a 2 , ⋯ , a n \alpha_{1}, a_{2}, \cdots, a_{n} α1,a2,⋯,an 线性无关; V V V 中任意一个向量 α \boldsymbol{\alpha} α 都可以由 α 1 , a 2 , ⋯ , a n \alpha_{1}, a_{2}, \cdots, a_{n} α1,a2,⋯,an 线性表示, 即 α = x 1 α 1 + x 2 a 2 + … + x n α n \alpha=x_{1} \alpha_{1}+x_{2} a_{2}+\ldots+x_{n} \alpha_{n} α=x1α1+x2a2+…+xnαn,那么称向量组 { α 1 , α 2 , ⋯ , α n } \left\{\alpha_{1}, \alpha_{2}, \cdots, \alpha_{n}\right\} {α1,α2,⋯,αn} 为向量空间 V V V 的一个基(极大无关组);称向量组 { α 1 , α 2 , ⋯ , a n } \left\{\alpha_{1}, \alpha_{2}, \cdots, a_{n}\right\} {α1,α2,⋯,an} 的元素个数 n n n 为向量空间 V V V 的维数(极大无关组的个数);称有序数组 ( x 1 , x 2 , ⋯ , x n ) \left(x_{1}, x_{2}, \cdots, x_{n}\right) (x1,x2,⋯,xn) 为向量 α \alpha α 在基 { α 1 , a 2 , ⋯ , a n } \left\{\alpha_{1}, a_{2}, \cdots, a_{n}\right\} {α1,a2,⋯,an} 上的坐标。
- 基的几何意义:为向量空间找一个基,目的是给这个空间定义一个坐标系(因此必须线性无关),以方便定位和计算;一个向量空间可以有多个不同的基(也就是多个不同的极大无关组,空间是一定的,因此空间的维数就是确定的)。
- 坐标与维数的几何意义:一个基包含的向量个数就是坐标轴的个数,也就是向量空间的维数;选取不同的基,但是维数不会改变,也就是基的个数不会改变。
- 向量在一个指定基下的坐标:给定基 α 1 , a 2 , ⋯ , a n \alpha_{1}, a_{2}, \cdots, a_{n} α1,a2,⋯,an, α = x 1 α 1 + x 2 a 2 + … + x n α n \alpha=x_{1} \alpha_{1}+x_{2} a_{2}+\ldots+x_{n} \alpha_{n} α=x1α1+x2a2+…+xnαn,则 α \alpha α在给定基下的坐标就是 { α 1 , a 2 , ⋯ , a n } \left\{\alpha_{1}, a_{2}, \cdots, a_{n}\right\} {α1,a2,⋯,an} 。注意这里的基(坐标系)未必正交 未必是单位向量,比如笛卡尔坐标系中, i 、 j 、 k i、j 、k i、j、k就是标准正交基。
基变换的几何意义:不同基下坐标不一样,如何转换
-
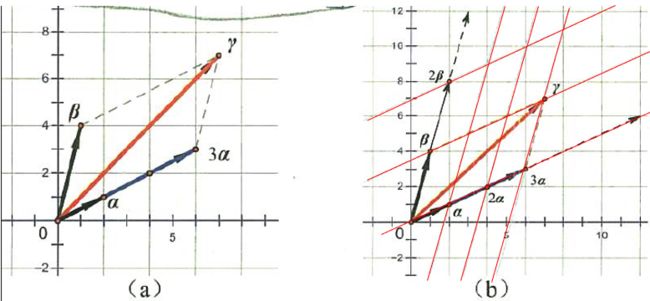
举例:直角平面坐标系 (实际上为单位正交基 i , j i, j i,j )的空间中, 有两个向量 α = ( 2 , 1 ) \alpha=(2,1) α=(2,1) 和 β = ( 1 , 4 ) \beta=(1,4) β=(1,4),如图(a)所示。这两个向量线性无关(不成倍数),让它们构成平面空间一对新基。 有另外一个向量 γ = ( 7 , 7 ) \gamma=(7,7) γ=(7,7) ,则可以把它拼奏为这两个新基的线性组合(而且组合是唯一的 ) ) ) : γ = 3 α + β \gamma = 3\alpha+\beta γ=3α+β,向量 γ \gamma γ相对于基 α 、 β \alpha、\beta α、β的坐标为 ( 3 , 1 ) (3,1) (3,1)。注意右侧重新对网格进行划分!!!!
基变换推导:
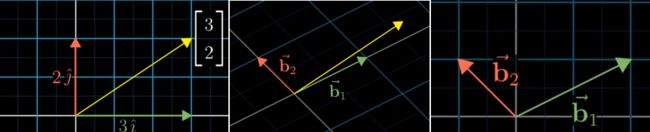
在标准单位正交坐标系中,向量 [ 3 2 ] \left[\begin{array}{l}3 \\ 2\end{array}\right] [32]就是 3 ı ^ + 2 ȷ ^ 3 \hat{\imath}+2\hat{\jmath} 3ı^+2ȷ^, ı ^ \hat{\imath} ı^与 ȷ ^ \hat{\jmath} ȷ^称为标准坐标系的基向量。
假设存在另外一组不同的基向量 b → 1 \overrightarrow{\mathbf{b}}_{1} b1和 b → 2 \overrightarrow{\mathbf{b}}_{2} b2,在这个坐标系中,标准单位正交坐标系中向量 [ 3 2 ] \left[\begin{array}{l}3 \\ 2\end{array}\right] [32]被表示为 [ ( 5 / 3 ) ( 1 / 3 ) ] \left[\begin{array}{l}(5 / 3) \\ (1 / 3)\end{array}\right] [(5/3)(1/3)],即 ( 5 / 3 ) b → 1 + ( 1 / 3 ) b → 2 (5 / 3) \overrightarrow{\mathbf{b}}_{1}+(1 / 3) \overrightarrow{\mathbf{b}}_{2} (5/3)b1+(1/3)b2。 b → 1 \overrightarrow{\mathbf{b}}_{1} b1和 b → 2 \overrightarrow{\mathbf{b}}_{2} b2在标准单位正交坐标系中 b → 1 = [ 2 1 ] \overrightarrow{\mathbf{b}}_{1}=\left[\begin{array}{l} 2 \\ 1 \end{array}\right] b1=[21], b → 2 = [ − 1 1 ] \overrightarrow{\mathbf{b}}_{2}=\left[\begin{array}{c} -1 \\ 1 \end{array}\right] b2=[−11]。但在基向量 b → 1 \overrightarrow{\mathbf{b}}_{1} b1和 b → 2 \overrightarrow{\mathbf{b}}_{2} b2组成的坐标系中, b → 1 \overrightarrow{\mathbf{b}}_{1} b1被看作 [ 1 0 ] \left[\begin{array}{l}1 \\ 0\end{array}\right] [10], b → 2 \overrightarrow{\mathbf{b}}_{2} b2被看作 [ 0 1 ] \left[\begin{array}{l}0 \\ 1\end{array}\right] [01], b → 1 \overrightarrow{\mathbf{b}}_{1} b1和 b → 2 \overrightarrow{\mathbf{b}}_{2} b2一般情况下不正交,且不是单位向量。
基向量 b → 1 \overrightarrow{\mathbf{b}}_{1} b1和 b → 2 \overrightarrow{\mathbf{b}}_{2} b2组成的坐标系中的向量转换到标准正交基中:
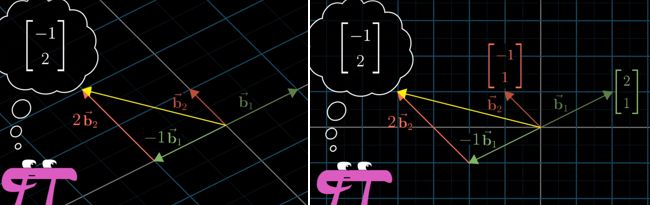
在基向量 b → 1 \overrightarrow{\mathbf{b}}_{1} b1和 b → 2 \overrightarrow{\mathbf{b}}_{2} b2组成的坐标系中,有一个向量 [ − 1 2 ] \left[\begin{array}{c}-1 \\ 2\end{array}\right] [−12],代表的意义就是 − b → 1 + 2 b → 2 -\overrightarrow{\mathbf{b}}_{1}+2\overrightarrow{\mathbf{b}}_{2} −b1+2b2。
在标准正交坐标系中, b → 1 = [ 2 1 ] \overrightarrow{\mathbf{b}}_{1}=\left[\begin{array}{l} 2 \\ 1 \end{array}\right] b1=[21], b → 2 = [ − 1 1 ] \overrightarrow{\mathbf{b}}_{2}=\left[\begin{array}{c} -1 \\ 1 \end{array}\right] b2=[−11],因此向量 [ − 1 2 ] \left[\begin{array}{c}-1 \\ 2\end{array}\right] [−12]被看作坐标 − 1 [ 2 1 ] + 2 [ − 1 1 ] = [ − 4 1 ] -1\left[\begin{array}{l}2 \\ 1\end{array}\right]+2\left[\begin{array}{c}-1 \\ 1\end{array}\right]=\left[\begin{array}{c} -4 \\ 1 \end{array}\right] −1[21]+2[−11]=[−41],利用矩阵乘法可表示为: [ 2 − 1 1 1 ] [ − 1 2 ] = − 1 [ 2 1 ] + 2 [ − 1 1 ] = [ − 4 1 ] \left[\begin{array}{cc}2 & -1 \\ 1 & 1\end{array}\right]\left[\begin{array}{c}-1 \\ 2\end{array}\right]=-1\left[\begin{array}{l}2 \\ 1\end{array}\right]+2\left[\begin{array}{c}-1 \\ 1\end{array}\right]=\left[\begin{array}{c}-4 \\ 1\end{array}\right] [21−11][−12]=−1[21]+2[−11]=[−41], [ 2 − 1 1 1 ] \left[\begin{array}{cc}2 & -1 \\ 1 & 1\end{array}\right] [21−11]中每列为标准正交基础中的 b 1 b_1 b1与 b 2 b_2 b2, [ − 1 2 ] \left[\begin{array}{c}-1 \\ 2\end{array}\right] [−12]为基向量 b → 1 \overrightarrow{\mathbf{b}}_{1} b1和 b → 2 \overrightarrow{\mathbf{b}}_{2} b2组成的坐标系中的坐标。矩阵与向量乘法就是一个特定的线性变换!!!!!
[ 2 − 1 1 1 ] \left[\begin{array}{cc}2 & -1 \\ 1 & 1\end{array}\right] [21−11]中每一列是标准正交基 i i i、 j j j变换后的位置。
前面可以看做 A x = b Ax=b Ax=b, A A A是线性变换, x x x是基向量 b → 1 \overrightarrow{\mathbf{b}}_{1} b1和 b → 2 \overrightarrow{\mathbf{b}}_{2} b2组成的坐标系中的向量, b b b就是标准正交坐标系中的向量。
标准正交基中的向量转换到基向量 b → 1 \overrightarrow{\mathbf{b}}_{1} b1和 b → 2 \overrightarrow{\mathbf{b}}_{2} b2组成的坐标系中:
给定标准正交基中的向量 [ 3 2 ] \left[\begin{array}{c}3 \\ 2\end{array}\right] [32], [ 2 − 1 1 1 ] \left[\begin{array}{cc}2 & -1 \\ 1 & 1\end{array}\right] [21−11]的逆矩阵表示为 [ 2 − 1 1 1 ] − 1 \left[\begin{array}{cc}2 & -1 \\ 1 & 1\end{array}\right]^{-1} [21−11]−1或者 A − 1 A^{-1} A−1,逆矩阵为 [ 1 / 3 1 / 3 − 1 / 3 2 / 3 ] \left[\begin{array}{cc}1 / 3 & 1 / 3 \\ -1 / 3 & 2 / 3\end{array}\right] [1/3−1/31/32/3],求标准正交基中的向量 [ 3 2 ] \left[\begin{array}{c}3 \\ 2\end{array}\right] [32]在基向量 b → 1 \overrightarrow{\mathbf{b}}_{1} b1和 b → 2 \overrightarrow{\mathbf{b}}_{2} b2组成的坐标系中的坐标。根 A x = b Ax=b Ax=b x = A − 1 b = [ 1 / 3 1 / 3 − 1 / 3 2 / 3 ] [ 3 2 ] = [ 5 / 3 1 / 3 ] x=A^{-1}b=\left[\begin{array}{cc} 1 / 3 & 1 / 3 \\ -1 / 3 & 2 / 3 \end{array}\right]\left[\begin{array}{l} 3 \\ 2 \end{array}\right]=\left[\begin{array}{l} 5 / 3 \\ 1 / 3 \end{array}\right] x=A−1b=[1/3−1/31/32/3][32]=[5/31/3],即在基向量 b → 1 \overrightarrow{\mathbf{b}}_{1} b1和 b → 2 \overrightarrow{\mathbf{b}}_{2} b2组成的坐标系中的坐标为 [ 5 / 3 1 / 3 ] \left[\begin{array}{l}5 / 3 \\ 1 / 3\end{array}\right] [5/31/3]。
不同坐标系中的线性变换:在基向量 b → 1 \overrightarrow{\mathbf{b}}_{1} b1和 b → 2 \overrightarrow{\mathbf{b}}_{2} b2组成的坐标系中如何描述旋转90度
矩阵代表线性变换的时候,我们是在跟踪 ı ^ \hat{\imath} ı^与 ȷ ^ \hat{\jmath} ȷ^的去向。考虑某个线性变换,譬如逆时针旋转90度,线性变换的矩阵表示是 [ 0 − 1 1 0 ] \left[\begin{array}{cc}0 & -1 \\ 1 & 0\end{array}\right] [01−10],这种表示方法与我们对基向量的选择密切相关。
从基向量 b → 1 \overrightarrow{\mathbf{b}}_{1} b1和 b → 2 \overrightarrow{\mathbf{b}}_{2} b2描述的任一向量 [ − 1 2 ] \left[\begin{array}{c}-1 \\ 2\end{array}\right] [−12]出发,首先,我们不用 b → 2 \overrightarrow{\mathbf{b}}_{2} b2描述这一过程,而是用基变换矩阵将 [ − 1 2 ] \left[\begin{array}{c}-1 \\ 2\end{array}\right] [−12]转化为标准正交基中的向量 [ 2 − 1 1 1 ] [ − 1 2 ] \left[\begin{array}{cc}2 & -1 \\ 1 & 1\end{array}\right]\left[\begin{array}{c}-1 \\ 2\end{array}\right] [21−11][−12],然后,将所得结果左乘旋转矩阵得到 [ 0 − 1 1 0 ] [ 2 − 1 1 1 ] [ − 1 2 ] \left[\begin{array}{cc}0 & -1 \\ 1 & 0\end{array}\right]\left[\begin{array}{cc}2 & -1 \\ 1 & 1\end{array}\right]\left[\begin{array}{c}-1 \\ 2\end{array}\right] [01−10][21−11][−12],此时得到的是变换后的向量,但仍然是用标准正交基来描述的,最后,将所得结果左乘基变换矩阵的逆矩阵 [ 2 − 1 1 1 ] − 1 [ 0 − 1 1 0 ] [ 2 − 1 1 1 ] [ − 1 2 ] \left[\begin{array}{cc}2 & -1 \\ 1 & 1\end{array}\right]^{-1}\left[\begin{array}{cc}0 & -1 \\ 1 & 0\end{array}\right]\left[\begin{array}{cc}2 & -1 \\ 1 & 1\end{array}\right]\left[\begin{array}{c}-1 \\ 2\end{array}\right] [21−11]−1[01−10][21−11][−12],得到变换后的用基向量 b → 1 \overrightarrow{\mathbf{b}}_{1} b1和 b → 2 \overrightarrow{\mathbf{b}}_{2} b2描述的向量。其中, [ 2 − 1 1 1 ] − 1 [ 0 − 1 1 0 ] [ 2 − 1 1 1 ] = [ 1 / 3 − 2 / 3 5 / 3 − 1 / 3 ] \left[\begin{array}{cc}2 & -1 \\ 1 & 1\end{array}\right]^{-1}\left[\begin{array}{cc}0 & -1 \\ 1 & 0\end{array}\right]\left[\begin{array}{cc}2 & -1 \\ 1 & 1\end{array}\right]=\left[\begin{array}{cc}1 / 3 & -2 / 3 \\ 5 / 3 & -1 / 3\end{array}\right] [21−11]−1[01−10][21−11]=[1/35/3−2/3−1/3],用这个矩阵乘以基向量 b → 1 \overrightarrow{\mathbf{b}}_{1} b1和 b → 2 \overrightarrow{\mathbf{b}}_{2} b