点云处理学习笔记(五)-- 特征描述子 PPF、PFH及FPFH
一、特征描述子
从三维场景中提取物体的基本思路是:先提取关键点,再使用各种局部特征描述子对关键点进行描述,最后与待检测物体进行比对,得到点 - 点的匹配。对于缺乏表面纹理,局部曲率变化很小,或点云本身就很系数的物体,采用局部特征描述子很难有效的提取到匹配对。
1)PPF特征描述子
Point Pair Feature特征描述算子其算法思想如下:
1.PPF的特征为[d,
2.针对目标点云,在两两之间构造点对特征F,如果有N个点,那么就需要构造N^2个特征,这些特征构成一个特征集合F_Set;
3.在点云场景中任意取一定点A,再任意取一动点B,在两点之间构造PPF特征,并在F_Set中寻找对应的特征,在理想情况下,如果找到了完全匹配的特征,则认为获得了点云匹配的结果;
4.该算法是一种投票算法,每次匹配都能获得一个旋转角度,如果有很多个动点B都投票给了某一旋转角度则认为投票成功;
5.算法的问题是:需要不停采样带来了极大的计算量。
2)PFH特征描述子
表面法线和曲率估计是某个点周围的几何特征基本表示法,虽然这样计算非常快速容易,但是无法获得太多的信息,因为它们只是用很少的几个参数值来近似表示一个点的k邻域的几何特征。然而大部分场景中包含许多的特征点,这些特征点有相同的或者非常相似的特征值,因此采用点特征表示法,其直接结果就减少了全局的特征信息。
三维特征描述子:点特征直方图PFH(Point Feature Histogram)的特征不仅与坐标轴的三维数据有关,同时还与表面法线有关。PFH计算方式通过参数化查询点与邻域点之间的空间差异,形成一个多维直方图对点的k邻域几何属性进行描述。直方图所在的高维超空间为特征表述提供了一个可以度量的信息空间,对点云对应曲面的六维姿态来说它具有不变性,且在不同的采样密度或领域的噪音等级下具有鲁棒性。
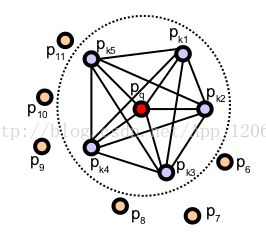
点特征直方图表示法是基于点与其k邻域之间的关系以及他们的估计法线,简而言之,PFH考虑估计法线方向之间所有的相互作用,试图捕获最好的样本表面变化情况,以描述样本的几何特征,因此,合成特征超空间取决于每个点的表面法线估计质量。如下图所示,表示的是一个查询点Pq的PFH计算的影响区域,Pq用红色标注并放在圆球的中间位置,与点Pq之间的距离小于半径r的所有点全部相互连接在一个网络中,最终的PFH描述子通过计算邻域内所有两点关系而得到的直方图。
为了计算两点Ps和Pt及他们对应的法线Ni和Nj之间的相对偏差,在其中的一个点上定义一个固定的局部坐标系,如下图所示:


使用上图中的uvw坐标系,法线之间的偏差可以用一组角度来表示:

用d来表示Ps与Pt之间的欧氏距离:
![]()
这样做就把两点和它们法线相关的12个参数(xyz坐标值和法线信息)减少到四个:
![]()
为查询点创建最终的PFH表示,所有的四元组将会以统计的方式放进直方图中,这个过程首先会把每个特征值范围划分为b个子区间,并统计落在每个子区间的点数目,因为四分之三的特征是法线的角度计量,在三角化圆上可以将它们的参数值非常容易地归一到相同的区间内。具体操作如下:在一个完全关联的空间内创建有五个区间的直方图,把每个特征区间划分成等分的数目,在这个空间中,一个直方图中的某一区间统计个数的增一对应一个点的四个特征值。

对于点云P中的每个点p:
1.得到p点的最近邻元素;
2.对于邻域中的每对点,计算其三个角度特征参数值;
3.将所有结果统计到一个输出直方图中;
4.算法的复杂程度取决于计算时选取的邻域k的个数。
3)FPFH特征描述子
在实时应用或接近实时应用中,密集点云的特征直方图的计算是PFH的主要性能瓶颈,为了简化直方图的特征计算,可以执行以下过程:
1.计算简化的点特征直方图SPFH(Simple Point Feature Histograms);
2.重新确定每个点的k邻域,使用邻近的SPFH值来计算最终的直方图。
对于一个已知的查询点,SPFH首先只利用和它的邻域点之间的对应对(以红线来表示)来估计它的SPFH值,这样做相较PFH的标准计算少了邻域点之间的互联,点云数据集中的所有点都要执行这一计算来获取SPFH,接着使用它的临近点的SPFH值和点的SPFH值重新计算权值,从而得到点的最终FPFH值。在下图中以黑线来表示FPFH计算添加的计算连接对,对于一些重要对点需要重复技术两次(以粗线来表示),而其他简介相连的则用系黑线来表示。

PFH和FPFH计算方式之间的主要区别如下:
1.FPFH没有对全互联点的所有邻近点的计算参数进行统计,因此可能漏掉了一些重要的点对,这些漏掉的点对可能对捕获查询点周围的几何特征有贡献;
2.PFH特征模型是对查询点周围的一个精确的邻域半径内,而FPFH还包括两倍半径范围内的额外点对;
3.因为重新进行权值计算的方式,所以FPFH结合SPFH的值,重新捕获邻近点对的几何信息;
4.由于大大降低了FPFH的整体复杂性,因此FPFH有可能使用在实时应用中;
5.通过分解三元组,简化了合成的直方图。

特征描述子相关PCL算法:Point Cloud Library (PCL): Module features (pointclouds.org)