点集凸包算法python实现
什么是凸包?
凸包定义
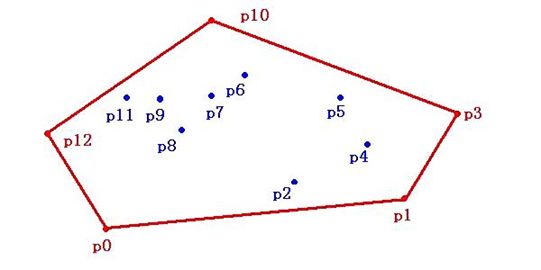
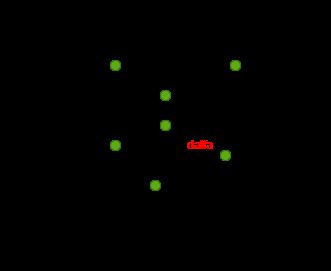
点集p的凸包是指一个最小凸多边形(内角均小于180°),满足p中的点或者在多边形边上或者在其内
下图中的红色线段表示的多边形就是点集p={p0,p1,p2,p3,…………,p12}的凸包
通俗理解
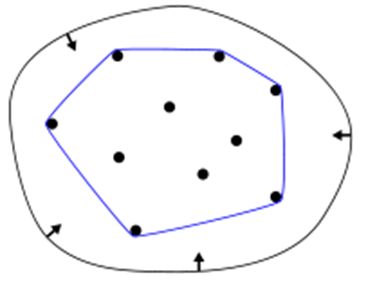
- 一组平面上的点,求一个包含所有点的最小的凸多边形
- 这可以形象地想成这样:在地上放置一些不可移动的木桩(代表点集中的点),用一根绳子把他们尽量紧地圈起来,这就是凸包
凸包有什么特点?
- 整个凸包都在任意一条边的一侧
- 凸包任意两点的中点都在凸包内
- 凸包内的任意点集的加权平均(凸组合)都在凸包内
凸包有什么用途?
- 从点集中抽象出一个唯一确定的凸多边形,即一组点集的凸包是唯一的,凹包并不唯一
- 用尽量少的点来描述一个点集的边界
- 使点集有序
- 对复杂多边形进行化简
- 为其它算法做预处理
绘制凸包的常见算法?
-
Jarvis march(包裹法)
-
Graham Scan(扫描法)
-
Divide and conquer(分治法)
-
Divide and conquer(分治法)
这里只讲解最简单常用的Jarvis march(包裹法)
Jarvis march(包裹法)
这种算法利用了凸包的一个特性:整个凸包都在任意一条边的一侧
基本思想如下:
- 选取必定在凸包上的一个点作为起点p0,可以是最低点,最高点,最左侧点,最右侧点其中一个,以最低点为例,将其放入凸包点集convexPoints=[p0]
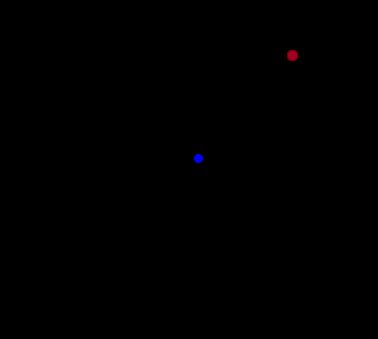
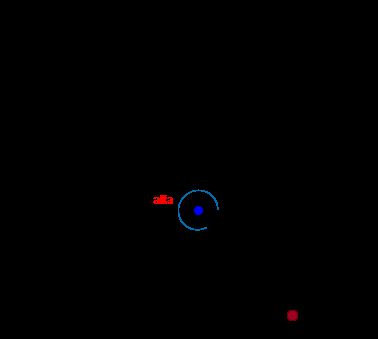
- 从点集剩余点中选取一点p1,使得点集中的所有点都在p0p1连线的同侧,方法如下:
点集中任意一点与p0的连线与x轴的夹角为alfa,选择使得夹角alfa最小的点为p1,此时点集中的所有点都在p0p1连线的同侧,将p1放入凸包点集中convexPoints=[p0,p1],并从点集p中删除点p1
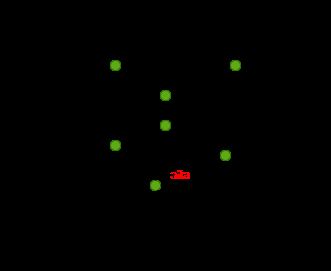
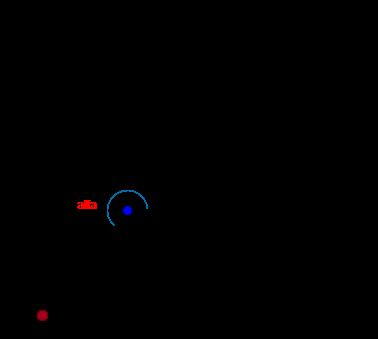
- 以点集p1为起点startPoint,p0为上一点previousPoint,在点集p的剩余点中寻找下一个凸包点p2=nextPoint,使得从startPoint出发到previousPoint 和nextPoint的夹角最大,此时该点为下一凸包点convexPoints=[p0,p1,p2],从点集p中删除点nextPoint
- 以p2为新起点startPoint,p1为新的上一点previousPoints,重复上一步骤,在p剩余点集中寻找下一点p3=nextPoint,直到寻找的nextPoint在convexPoints中已经出现,此时凸包点已经首位闭合
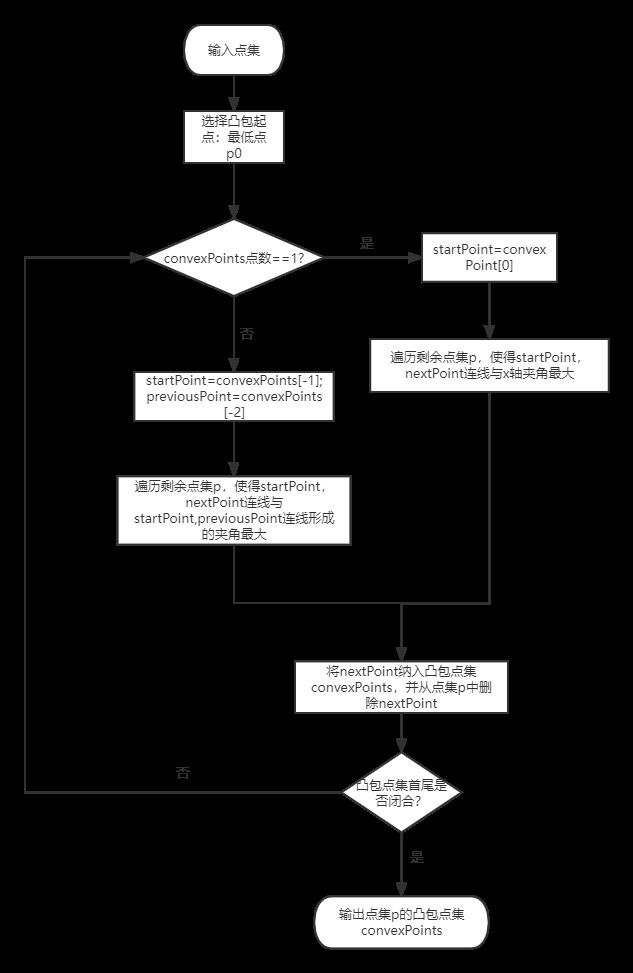
算法流程图
补充
如何计算与x轴的逆时针夹角alfa
- 第一象限
alfa=arctan(dy/dx)
- 第二象限

alfa=arctan(dy/dx)+pi
- 第三象限
alfa=arctan(dy/dx)+pi
- 第四象限
alfa=arctan(dy/dx)+2pi
python代码
def getAlfa(startPoint, endPoint):
dx = endPoint[0] - startPoint[0]
dy = endPoint[1] - startPoint[1]
if dx == 0:
if dy > 0:
return np.pi / 2
elif dy < 0:
return 3 * np.pi / 2
else:
return np.pi
alfa = np.arctan(dy / dx)
if dx < 0:
alfa += np.pi
elif dy < 0:
alfa += np.pi * 2
return alfa
如何计算startPoint与previousPoint,nextPoint连线的夹角dalfa
- 记startPoint与previousPoint连线与x轴的夹角为alfa1
- 记startPoint与nextPoint连线与x轴的夹角为alfa2
dlfa=abs(alfa2-alfa1)
如果dalfa大于pi,由于凸多边形的内角小于180°,因此此时还需要用dalfa=2pi-dalfa
完整代码
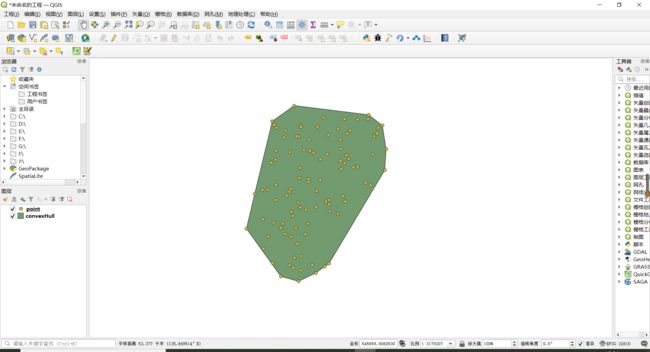
基于上述算法,用gda库计算点SHP文件的凸包
from osgeo import ogr, gdalconst, osr
import numpy as np
import pandas as pd
import os
def getAlfa(startPoint, endPoint):
dx = endPoint[0] - startPoint[0]
dy = endPoint[1] - startPoint[1]
if dx == 0:
if dy > 0:
return np.pi / 2
elif dy < 0:
return 3 * np.pi / 2
else:
return np.pi
alfa = np.arctan(dy / dx)
if dx < 0:
alfa += np.pi
elif dy < 0:
alfa += np.pi * 2
return alfa
def convexHull(xys: np.array):
convexPoints = []
ymin = np.min(xys, axis=0)[1]
index = np.where(xys[:, 1] == ymin)[0][0]
convexPoints.append(xys[index, :])
n = 1
while True:
if n == 1:
startPoint = convexPoints[0]
minAlfa = 0
index = 0
for i in range(xys.shape[0]):
endPoint = xys[i, :]
alfa = getAlfa(startPoint, endPoint)
if i == 0:
minAlfa = alfa
index = 0
else:
if alfa < minAlfa:
minAlfa = alfa
index = i
convexPoints.append(xys[index, :])
xys = np.delete(xys, index, axis=0)
n += 1
else:
startPoint = convexPoints[-1]
previousPoint = convexPoints[-2]
alfa0 = getAlfa(startPoint, previousPoint)
maxAlfa = 0
index = 0
for i in range(xys.shape[0]):
nextPoint = xys[i, :]
alfa1 = getAlfa(startPoint, nextPoint)
dalfa = (alfa0 - alfa1) if alfa0 > alfa1 else (alfa1 - alfa0)
if dalfa > np.pi:
dalfa = np.pi * 2 - dalfa
if i == 0:
maxAlfa = dalfa
index = 0
else:
if dalfa > maxAlfa:
maxAlfa = dalfa
index = i
convexPoints.append(xys[index, :])
xys = np.delete(xys, index, axis=0)
n += 1
# 判断首位是否重合
firstPoint = convexPoints[0]
lastPoint = convexPoints[-1]
if firstPoint[0] == lastPoint[0] and firstPoint[1] == lastPoint[1]:
break
wktPolygon = ""
for i in range(n):
x = convexPoints[i][0]
y = convexPoints[i][1]
wktPolygon = '{} {},'.format(x, y) + wktPolygon
wktPolygon = wktPolygon[0:-1]
wktPolygon = "POLYGON(({}))".format(wktPolygon)
return wktPolygon
if __name__ == "__main__":
ogr.RegisterAll()
ds = ogr.Open("./point.shp", gdalconst.GA_ReadOnly)
oLay = ogr.DataSource.GetLayer(ds, 0)
ogr.Layer.ResetReading(oLay)
xys = []
while True:
oFea = ogr.Layer.GetNextFeature(oLay)
if oFea == None:
break
oPoi = ogr.Feature.GetGeometryRef(oFea)
x = ogr.Geometry.GetX(oPoi)
y = ogr.Geometry.GetY(oPoi)
xys.append([x, y])
xys = np.array(xys)
wktPolygon = convexHull(xys)
driver = ogr.GetDriverByName("ESRI Shapefile")
convexds = ogr.Driver.CreateDataSource(driver, "convexHull.shp")
srs = ogr.Layer.GetSpatialRef(oLay)
convexLay = ogr.DataSource.CreateLayer(convexds, "convexhull", srs, ogr.wkbPolygon)
labelField = ogr.FieldDefn("label", ogr.OFTInteger)
ogr.Layer.CreateField(convexLay, labelField)
convexFea = ogr.Feature(ogr.Layer.GetLayerDefn(convexLay))
ogr.Feature.SetField(convexFea,"label",1)
convexPolygon=ogr.CreateGeometryFromWkt(wktPolygon)
ogr.Feature.SetGeometry(convexFea,convexPolygon)
ogr.Layer.CreateFeature(convexLay,convexFea)
ogr.DataSource.Destroy(convexds)
ogr.DataSource.Destroy(ds)
print('ok!')
结算结果,如下图所示: