机器学习与数据挖掘期末复习
一、引言
1.数据中的知识发现包括哪几个步骤?
数据源—(数据整合)—整理过的数据—(筛选与预处理)—准备好的数据—(选择函数、算法,进行数据挖掘)—模型—(数据评估)—专业知识
2.数据挖掘应用
目标检测、文本分类、语音识别、数据建模、自动驾驶、用户自定义学习、疾病故障自检
二、学习的可行性
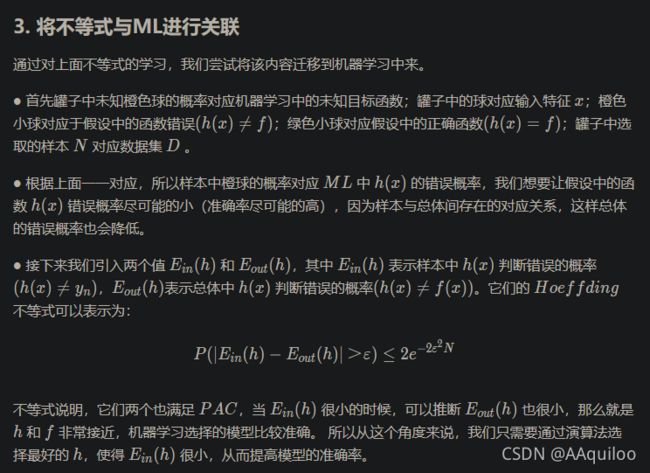
1.Hoeffding不等式

2.用Hoeffding不等式说明学习可行性
三、数据和数据预处理
1.有哪四种不同的属性类型?分别可以进行什么操作?
标称属性(nominal):模、熵、卡方
序数属性(ordinal):中值、百分比、符号检测
区间属性(interval):平均值、标准差、
比率属性(ratio):几何平均数、调和平均数
2.非对称属性?
对属性的关注值不同,比如二元属性,当考虑普通人的患癌情况时,健康时属性为0,患癌时为1,这样大部分情况下该属性都为0,因此我们一般只关注属性为1的情况,所以这个就是非对称的二元属性。
3.数据对象之间相似度、相异度极端
两个对象之间的相似度(similarity)的非正式定义是这两个对象相似程度的数值度量。通常,相似度是非负的,并常常在 0 (不相似)和 1 (完全相似)之间取值。
两个对象之间的相异度(dissimilarity)是这两个对象差异程度的数值度量。通常术语距离(distance)用作相异度的用一次,相异度在 0 和 正无穷大 之间取值。
4.数据预处理的主要任务
数据清理:填写缺失值、光滑噪声数据、识别/删除离群的点
数据集成:将多个数据源上的数据合并
数据变换:数据标准化和数据聚合
数据规约:将巨大的数据规模变小,但分析结果大体相同
数据离散化:增强鲁棒性
5.处理缺失值的方法
1.减少数据集并删除缺失值所在样本
2.找到缺失的值:输入缺失数据的合理预测值、使用一些常量自动替换缺失值、使用其他特征值替换缺失值
决策树学习
1.决策树学习的基本思想
决策树从根节点开始,测试待分类项中相应的特征属性,并按照其值选择输出分支,直到到达叶子节点,将叶子节点存放的类别作为决策结果,以此来实现学习。
其每个非叶节点表示一个特征属性上的测试,每个分支代表这个特征属性在某个值域上的输出,而每个叶节点存放一个类别。
决策树代表了条件对待测试项特征属性的分离。
ppt核心观点:
根节点:每种属性值都会被测试,选择最好的一个(容易分、分的快)去当作根节点的测试方法(就是希望每次选择的属性可以让划分后的分支数据更有区分性,使各个分支的数据分类纯度更高,最好是每个分支的样本数据尽可能属于同一类别。)
为每个属性的可能值创建根节点的后代,并且将训练示例分类到适当的后代节点。
还有个第三点
2.分类错误率,熵,信息增益的概念,如何根据不同度量选择最佳划分
决策树学习的关键在如何选择最优划分属性。一般而言,随着划分过程不断进行,我们希望决策树的分支结点所包含的样本尽可能属于同一类别, 即结点的 “纯度”(purity)越来越高。在分类树中,划分的优劣用不纯度度量(impurity-measure)定量分析。
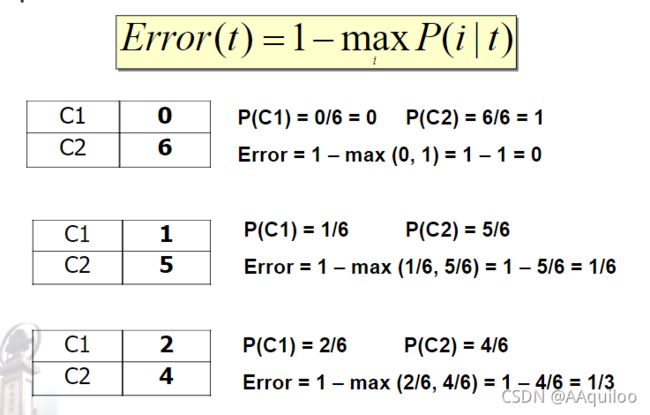
分类错误率
在二分类中,对于任意一个叶子节点,假设其中一个类别A占比(概率)为p,则另外一个类别B的占比(概率)就是1-p。那么,我们可以直观地将分类误差作为损失,即:
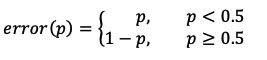
上式表示:当一个叶子类目中的类别A占比较多时(p>0.5),进入该叶子结点的样本就会被判别为类别A,那么剩下的占比为1-p的(类别B)样本则会被分类错误,随之产生的分类误差率就是1-p;反之,当叶子结点中类别A样本较少(p<=0.5)时,该叶子结点就表示类别B,所有进入该节点的类别A样本将会被分类错误,随之产生的分类误差率就是p.
PPT:
分类误差的计算:
熵
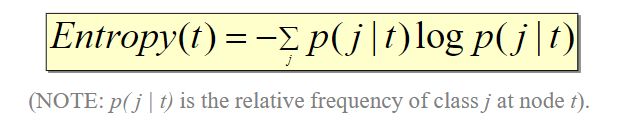
信息熵,熵反映了事件的不确定性,对于一般分布事件而言,熵是各种可能性的熵以概率为权重进行加和。
熵的公式为:

属性划分让每个分支纯度更高,所以只需要计算划分前后熵的变化就可以了
1.划分之前计算事件的熵:Ent(X)
2.按照属性 A 划分后再次计算事件的熵:Ent(X|A)
3.则 Ent(X) - Ent(X|A) 就是划分之后熵被消除了多少。
PPT:
节点不纯度计量方法:
最大:records在所有类中平均分布,代表最少的信息
最小:所有records都是一类,代表大多数信息
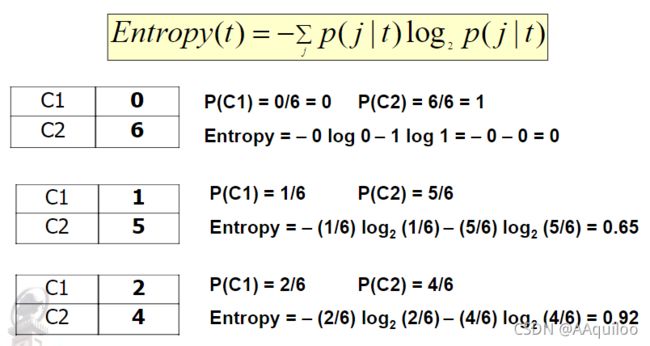
熵的计算:
信息增益
因为信息与熵大小相等意义相反,所以消除了多少熵就相当于增加了多少信息,这就是信息增益的由来。
所以信息增益:Gain(X,A) = Ent(X) - Ent(X|A)
其中条件熵的计算:

PPT:
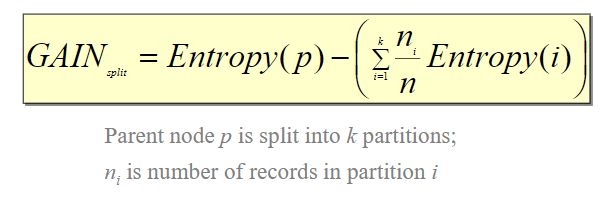
(父节点p被分裂成k划分;ni是划分i的records的数量)
Choose the split that achieves most reduction (maximizes GAIN)
增益率:

3.缺失值对决策树有何影响
①影响不纯度如何计算
②影响如何向子节点分配带有缺失值的实例
③影响带有缺失值的测试实例如何分类
4.给定混淆矩阵,分类效果度量不同指标的含义及计算方法
5.评估分类器性能的留一法和k折交叉验证
留一法:
每次只留下一个样本做测试集,其它样本做训练集,如果有k个样本,则需要训练k次,测试k次。
留一法计算最繁琐,但样本利用率最高。适合于小样本的情况。
k折交叉验证:
1、 将全部训练集 S分成 k个不相交的子集,假设 S中的训练样例个数为 m,那么每一个子 集有 m/k 个训练样例,,相应的子集称作 {s1,s2,…,sk}。
2、每次从分好的子集中里面,拿出一个作为测试集,其它k-1个作为训练集
3、根据训练训练出模型或者假设函数。
4、 把这个模型放到测试集上,得到分类率。
5、计算k次求得的分类率的平均值,作为该模型或者假设函数的真实分类率。
这个方法充分利用了所有样本。但计算比较繁琐,需要训练k次,测试k次。
6.过拟合和欠拟合
过拟合的原因是样本过少,过拟合的结果在决策树上会比所需要的复杂得多
Occam’s Razor:Prefer simpler models
因为训练实例只是所有可能的实例的样本,所以可以在树上添加分支来提高性能,同时降低在本集之外的其他实例上的性能。???p70
五、神经网络
1.神经网络如何学习?有何特点?
神经网络通过调整权重来学习,以便能够正确对训练数据进行正确分类,在测试阶段后能够去分类未知的数据。
神经网络需要很长时间去训练。
神经网络对噪声和不完整的数据有很高的忍受度。
神经网络的特点:???
神经网络适合的问题域:
输入是高维离散量或实值
输出是离散量或实值
输出是矢量值
目标函数的功能未知
不需要去解释结果(黑盒模型)
2.梯度下降算法
假设空间:
w1、w2平面代表整个假设空间。
对线性单元来说,这个error平面必须是具有单个全局最小值的抛物线
我们想要这个最小值的假设:
由于error平面仅包含单个全局最小值,所以该算法将收敛到具有最小误差的权重向量,无论训练集是否是线性可分离的或给定足够小的η。
梯度下降搜索通过:从任意初始权重向量开始,反复的修改它,在每步在方向上改变权重向量来在error表面熵产生陡峭的下降来确定最小化的权重向量
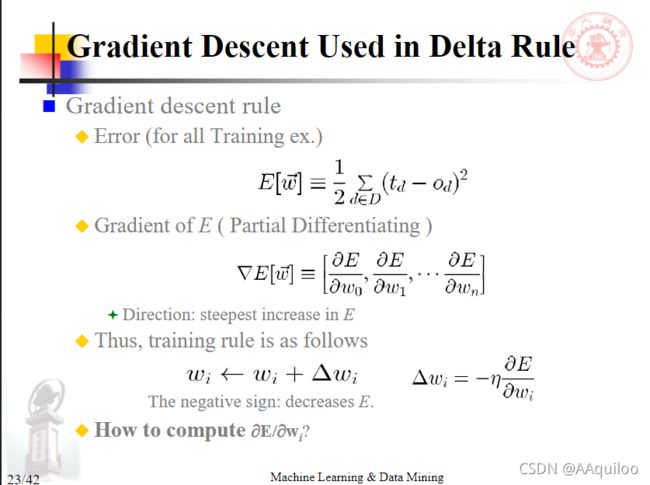
每个训练样本都以成对的形式![]()
其中x1-xn是输入向量,t 是目标输出值,η 是学习率
以一些小的随机值初始化每个wi
当满足终止条件时,Do:
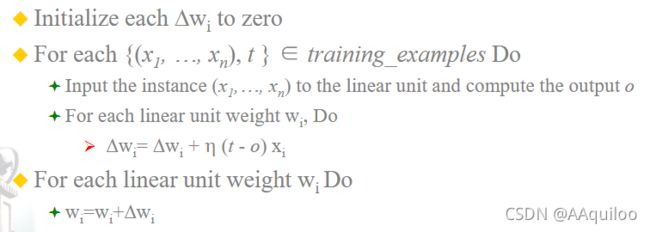
初始化每个 到0;
对每个训练样本,输入实例到线性单元计算输出o,更新Δwi;
对每个线性单元权重wi进行更新

保证汇聚到最小平方error的假设
最小学习率η
就算训练集有噪声
就算训练集不是线性可分的
3.多层神经网络使用什么算法进行训练?
反向传播算法
六、贝叶斯学习
1.根据贝叶斯理论,如何计算一个假设h成立的后验概率?
2.极大后验概率假设和极大似然假设有何区别?
最大后验概率:
最大后验估计中引入了先验概率
在许多学习场景中,学习器考虑候选假设集合H并在其中寻找给定数据D时,可能性最大的假设h(或者存在多个这样的假设时选择其中之一)。这样的具有最大可能性的假设h被称为极大后验(maximum a posteriori, MAP)假设。
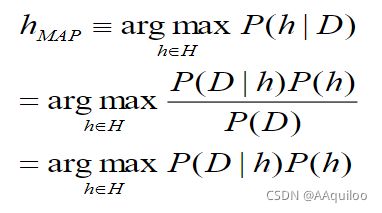
在最后一步,去掉了P(D),因为它不依赖于h。
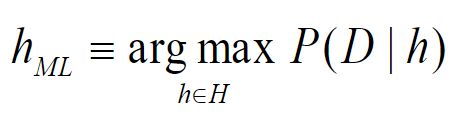
极大似然估计:
极大似然估计的核心思想是:认为当前发生的事件是概率最大的事件。因此就可以给定的数据集,使得该数据集发生的概率最大来求得模型中的参数。
极大似然估计只关注当前的样本,也就是只关注当前发生的事情,不考虑事情的先验情况。
3.最小描述长度的基本思想
最小描述长度准则的信息论解释
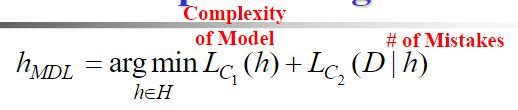
极大后验假设所满足的等式,可以等价地表示为使以2为底的对数的负值最小化:

上述等式与我们熟悉的极大后验假设公式完全等价。由此也不难看出:
-
公式中第一项对应的是——在给定假设 h 时,训练数据 D 的描述长度。也即是发送者和接收者都知道假设 h 时描述数据 D 的最优编码。
-
公式中第二项对应的是——在假设空间 H 的最优编码下 h 的描述长度。
至此,可以看出:最小描述长度准则默认选用使这两个描述长度的和最小化的假设 h。
对最小描述长度的思考
从信息论的角度看最小描述长度公式,可以把整个学习过程(以分类为例)理解为以下过程:
发送者需要将训练数据 D (包含特征和分类结果)、拟合这些数据的假设 h 以编码的方式传送给接收者。在此处明确一下发送者究竟需要传送哪些必须的信息呢?
训练数据——为了尽量降低编码长度,我们假设发送者和接收者都知道每一个训练数据的特征信息,所以特征信息就不用编码传送。而每一个训练数据的分类结果必须传送吗?答案是N0,因为我们还要讲假设 h 编码传送。如果训练数据的分类结果label 和通过假设 h 预测出的结果一致,那么我们就不需要传送这个数据的标签信息。只有当训练数据预测出错时,才需要将正确的标签信息传送。
假设——假设 h 必须编码传送。并且 h 越复杂, 编码长度越大。如若不明白,可以假设学习器是决策树,对树的编码方法随着决策树节点和边的增长而增加。
其中对训练数据的编码和对假设的编码分别记为 C1 和 C2。
至此可以看出,当 C1 和 C2 分别选取MDL准则中对应的最佳编码方式时训练数据和假设的编码长度之和最小。所选的假设 h 也就是 极大后验假设。
注:从上面的分析可以看出,MDL准则,实际上是假设复杂性(模型复杂度)和假设产生错误的数量之间对的一个折中。MDL 倾向于选择一个产生少量错误而且较短的假设,而不是能完美分类你和训练数据的较长的假设。
4.贝叶斯最优分类器的基本思想
新实例的最可能分类是通过组合所有假设的预测获得的,并按其后验概率加权

其中 V 是分类可以采用的所有值的集合,vj是这种分类的一种可能