视觉SLAM的二维和三维点的特征匹配,位姿估计的方法总结
对于视觉,单目经常拿到的数据点是二维,当然也有像双目、kinetic这样的深度相机拿到3d坐标,对于激光一般都是拿到的三维点云坐标。那么对于一些已经提取到的特征点,如何进行匹配,从而估计出传感器的运动,参考视觉十四讲第七讲,自己总结一下,便于以后查看:
首先介绍以下相机的运动过程:世界系、相机系、归一化相机系、像素系
世界坐标系固定下,有一点Pw(x,y,z),相机在初始时刻在世界坐标系下的位姿已知,可以得到P点在cam0时刻的位姿Pc(x,y,z),再将相机坐标系转换到归一化相机平面(Z=1),得到归一化坐标Pc(x/z,y/z,1)齐次坐标,可以得到像素坐标:K*Pc(x/z,y/z,1)。
1、2d-2d:对极几何 ,要转化为3d-2d的问题
图像特征点对的距离筛选标准一般是,汉明距离 < 最小距离的两倍
1)对极约束:![]() 是等式为0的约束(p1、p2是像素坐标),因此E矩阵在不同尺度下是等价的。三个矩阵都会求解出4组解,利用相机深度一定为正(三角化检测),得到第一帧和第二帧间运动的正确解T21(H矩阵还需要其他方式去排除)。
是等式为0的约束(p1、p2是像素坐标),因此E矩阵在不同尺度下是等价的。三个矩阵都会求解出4组解,利用相机深度一定为正(三角化检测),得到第一帧和第二帧间运动的正确解T21(H矩阵还需要其他方式去排除)。
2)基础矩阵E(3x3):t的反对称矩阵乘以R(外积),E = t^ * R(8点法求解E,SVD去分解出运动)
CVlib:findFundamentalMat()
3)本质矩阵F(3x3):与E只差相机内参矩阵(光心、焦距eg.),![]()
CVlib:findEssentialMat()、recoverPose()
4)单应矩阵H(3x3):适用于相机平面与特征平面平行(无人机俯视地面),4组匹配点求解,不能有3个共线的点。
CVlib:findHomoGraphyMat()
5)尺度归一化问题:旋转矩阵R自身是正交矩阵,可以认为就是归一化的,所有认为E的尺度是由于t具有一个尺度带来的,这将导致,单目视觉的尺度不确定性;因此,单目视觉在初始化时,必须带有平移,不能只有旋转;
6)三角化检测:从估计的R,t,建立最小二乘方程,求匹配的特征点的深度;然后以初始化计算的点深度对应的归一化的t,完成尺度确定。点深度为正,完成R,t确定。(三角检测相机运动也必须带有平移)
CVlib:triangulatePoints()
总结:特征点共面、相机发生旋转时,E矩阵出现退化,一般是同时估计F和H,选择重投影误差小的解。2)---4)完成运动估计,6)完成深度估计,并解决尺度问题。对于有多于8对点的求解方式:构建最小二乘超定方程组或者ransac。单目初始化完成后,就可以使用3d-2d来估计运动。构建线性方程组时,一般将待求解的nxn的矩阵,写为 x1的未知向量,进行构建。
x1的未知向量,进行构建。
2、3d-2d:PnP(至少3对点),一般转换为3d-3d方式
T21求解方式有:
1)DLT:直接线性变换,解线性方程组至少6 对点,多于6对点构建超定方程组,最后对求出的矩阵可以使用QR分解出满足SO(3)的R矩阵和t;
2)P3P:3对点,将2d点求得它的3d坐标,转换到统一坐标系下进行3d-3d的匹配,计算相机运动,因此P3P只是利用三角形相似得到了2d点的3d坐标;
CVlib:solvePnP()、Rodrigues()
3)非线性:BA,最小化重投影误差(将像素坐标与3d点按照当前估计的位姿进行投影构建的误差),高斯牛顿、列-马、Dog-leg等非线性优化方法(SLAM常用的优化库g2o、ceres、gtsam);
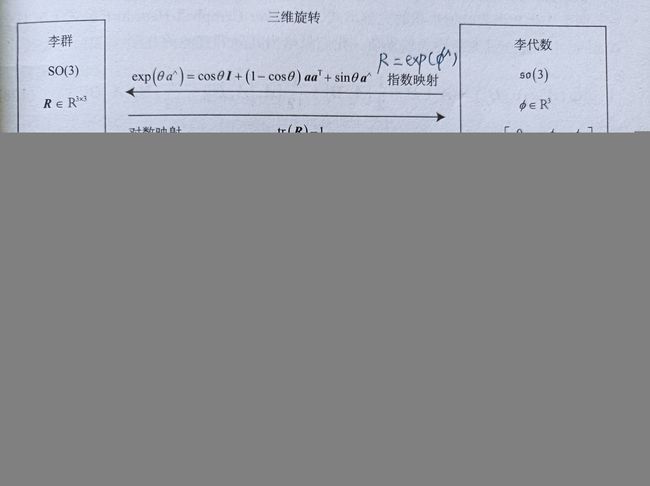
--李群:SO(3)3维、SE(3)6维,对乘法封闭;记三维向量为 ,
, ,也叫李代数,关系如下:
,也叫李代数,关系如下:
R在t时刻的一阶导数 = ^ * R,反应了R的导数性质,是SO(3)原点附近的正切空间。在t时刻,且有R = exp(^),T = exp(^);
--李代数:so(3) 、se(3)对加法封闭;李代数求导:掌握左乘扰动模型。
左扰动
对应的李代数为
,Rp对R求导,R用李代数表示(指数映射),转为Rp对
![]()
左扰动
对应的李代数为
,那么:
![]()
--泰勒展开: ![]()
设此处 为误差函数,
为误差函数, 是雅克比矩阵是误差函数对待优化变量的一阶导数;那么对应于书中推到的误差函数
是雅克比矩阵是误差函数对待优化变量的一阶导数;那么对应于书中推到的误差函数![]() ,主要想优化相机位姿(李代数)和特征点的空间位置,最关键的就是关于这两个变量推到出来的矩阵。
,主要想优化相机位姿(李代数)和特征点的空间位置,最关键的就是关于这两个变量推到出来的矩阵。
注意:g2o提供的se3的边是旋转在前,平移在后,与李代数的定义相反。因此_jacobianOplusXx的前三列和后三列与推导出来的矩阵要交换;误差的定义:可以是观测值-预测值,也可以是预测值-观测值,此时的雅克比矩阵只需要取相反数;
3、3d-3d:
icp求解方式
非线性优化的具体方法算法,内容比较多,以后再总结。。。
参考:高博视觉十四讲