KF、EKF、ESKF的区别与联系
目录
- 背景
-
- 贝叶斯滤波系列
- KF、EKF、ESKF的原理与区别
-
- 贝叶斯滤波
- 卡尔曼滤波(KF,Kalman Filter)
- 扩展卡尔曼滤波(EKF,Extended Kalman Filter)
- Error-State卡尔曼滤波(ESKF)
-
- predict过程
- update过程
- 总结
-
- KF、EKF、ESKF的联系
- KF、EKF、ESKF的区别
- 与其他滤波方法的区别
背景
滤波:去除噪声还原真实数据的一种数据处理方法,被广泛应用于对信号准确度有需求的众多领域,例如军事、航天、通信等等。
常用滤波方法:以低通滤波、带通滤波、高通滤波为代表的按照频率滤波的方式;以卡尔曼滤波、粒子滤波为代表的贝叶斯滤波系列。此外,常用的还有滑动窗口滤波、均值滤波和中值滤波等方法。
贝叶斯滤波系列
贝叶斯滤波:基于贝叶斯公式推导得到的一种滤波理论框架,其本身不是一种具体的实现方法,基于其理论产生了一系列滤波方法,例如卡尔曼滤波系列和粒子滤波。
卡尔曼滤波:一种针对线性系统、将噪声假设为高斯噪声的贝叶斯滤波具体实现形式,具有实现简单、效率高等优点。
贝叶斯公式:

卡尔曼滤波的五条公式:

KF、EKF、ESKF的原理与区别
贝叶斯滤波
首先确定存在系统方程:
x k = f ( x k − 1 , u k , w k ) x_k= f(x_{k-1},u_k,w_k) xk=f(xk−1,uk,wk)
以及观测方程:
y k = h ( x k , v k ) y_k=h(x_k,v_k) yk=h(xk,vk)
其中,x表示系统状态,y表示观测量,w表示系统传递噪声,v表示观测误差。
根据贝叶斯公式:

结合已有系统得到贝叶斯公式如下:
p ( x k ∣ y 1 : k ) = p ( y k ∣ x k , y 1 : k − 1 ) p ( x k , y 1 : k − 1 ) p ( y 1 : k ) = p ( y k ∣ x k , y 1 : k − 1 ) p ( x k ∣ y 1 : k − 1 ) p ( y k ∣ y 1 : k − 1 ) = p ( y k ∣ x k ) p ( x k ∣ y 1 : k − 1 ) ∫ p ( y k ∣ x k ) p ( x k ∣ y 1 : k − 1 ) d x k \begin{aligned} p(x_k|y_{1:k})&=\cfrac{p(y_k|x_k,y_{1:k-1})p(x_k,y_{1:k-1})}{p(y_{1:k})}\\ &=\cfrac{p(y_k|x_k,y_{1:k-1})p(x_k|y_{1:k-1})}{p(y_k|y_{1:k-1})}\\ &=\cfrac{p(y_k|x_k)p(x_k|y_{1:k-1})}{\int p(y_k|x_k)p(x_k|y_{1:k-1})dx_k} \end{aligned} p(xk∣y1:k)=p(y1:k)p(yk∣xk,y1:k−1)p(xk,y1:k−1)=p(yk∣y1:k−1)p(yk∣xk,y1:k−1)p(xk∣y1:k−1)=∫p(yk∣xk)p(xk∣y1:k−1)dxkp(yk∣xk)p(xk∣y1:k−1)
以上推导过程假设了系统具有马尔可夫性,因此 p ( y k ∣ x k , y 1 : k − 1 ) = p ( y k ∣ x k ) p(y_k|x_k,y_{1:k-1})=p(y_k|x_k) p(yk∣xk,y1:k−1)=p(yk∣xk)
p ( x k ∣ y 1 : k − 1 ) p(x_k|y_{1:k-1}) p(xk∣y1:k−1):先验概率密度,通过上一次的系统状态结合系统方程计算得到。
p ( y k ∣ x k , y 1 : k − 1 ) p(y_k|x_k,y_{1:k-1}) p(yk∣xk,y1:k−1):似然概率密度,由观测方程计算得到
p ( x k ∣ y 1 : k ) p(x_k|y_{1:k}) p(xk∣y1:k):后验概率密度,即我们所需要得到的结果
其中先验概率密度可以进一步展开为:
p ( x k ∣ y 1 : k − 1 ) = ∫ ( x k , x k − 1 ∣ y 1 : k − 1 ) d x k − 1 = ∫ p ( x k ∣ x k − 1 , y 1 : k − 1 ) p ( x k − 1 ∣ y 1 : k − 1 ) d x k − 1 = ∫ p ( x k ∣ x k − 1 ) p ( x k − 1 ∣ y 1 : k − 1 ) d x k − 1 \begin{aligned} p(x_k|y_{1:k-1})&=\int (x_k,x_{k-1}|y_{1:k-1})dx_{k-1}\\ &=\int p(x_k|x_{k-1},y_{1:k-1})p(x_{k-1}|y_{1:k-1})dx_{k-1}\\ &=\int p(x_k|x_{k-1})p(x_{k-1}|y_{1:k-1})dx_{k-1} \end{aligned} p(xk∣y1:k−1)=∫(xk,xk−1∣y1:k−1)dxk−1=∫p(xk∣xk−1,y1:k−1)p(xk−1∣y1:k−1)dxk−1=∫p(xk∣xk−1)p(xk−1∣y1:k−1)dxk−1
以上公式中包含积分运算,对于一般的非线性、非高斯系统,很难得到后验概率的解析解,因此,需要结合具体的假设完成其实现形式。
卡尔曼滤波(KF,Kalman Filter)
基础假设:

基于基础假设后,线性化的系统方程和观测方程具化为:
x k = F k x k − 1 + B k u k + w k y k = H k x k + v k x_{k}=F_kx_{k-1}+B_ku_{k}+w_k \\[3mm] y_k=H_kx_k+v_k xk=Fkxk−1+Bkuk+wkyk=Hkxk+vk
先验概率密度具化为:
p ( x k ∣ y 1 : k − 1 ) = ∫ p ( x k ∣ x k − 1 ) p ( x k − 1 ∣ y 1 : k − 1 ) d x k − 1 p(x_k|y_{1:k-1})=\int p(x_k|x_{k-1})p(x_{k-1}|y_{1:k-1})dx_{k-1} p(xk∣y1:k−1)=∫p(xk∣xk−1)p(xk−1∣y1:k−1)dxk−1
其中:
p ( x k ∣ x k − 1 ) ∼ N ( F k x k − 1 + B k u k , W k ) p ( x k − 1 ∣ y 1 : k − 1 ) ∼ N ( μ k − 1 , P k − 1 ) p(x_k|x_{k-1})\sim N(F_kx_{k-1}+B_ku_{k},W_k)\\[3mm] p(x_{k-1}|y_{1:k-1})\sim N(\mu_{k-1},P_{k-1})\\[3mm] p(xk∣xk−1)∼N(Fkxk−1+Bkuk,Wk)p(xk−1∣y1:k−1)∼N(μk−1,Pk−1)
代入积分得到(积分过程忽略):
p ( x k ∣ y 1 : k − 1 ) ∼ N ( μ ^ k , P ^ k ) μ ^ k = F k μ k − 1 + B k u k P ^ k = F k P k − 1 F k T + W k p(x_k|y_{1:k-1})\sim N(\hat \mu_k, \hat P_k)\\[3mm] \hat \mu _k=F_k\mu_{k-1}+B_ku_k\\[3mm] \hat P_k=F_kP_{k-1}F_k^T+W_k p(xk∣y1:k−1)∼N(μ^k,P^k)μ^k=Fkμk−1+BkukP^k=FkPk−1FkT+Wk
于是就得到了先验概率分布。后验概率密度为:
p ( x k ∣ y 1 : k ) = p ( y k ∣ x k ) p ( x k ∣ y 1 : k − 1 ) ∫ p ( y k ∣ x k ) p ( x k ∣ y 1 : k − 1 ) d x k \begin{aligned} p(x_k|y_{1:k})=\cfrac{p(y_k|x_k)p(x_k|y_{1:k-1})}{\int p(y_k|x_k)p(x_k|y_{1:k-1})dx_k} \end{aligned} p(xk∣y1:k)=∫p(yk∣xk)p(xk∣y1:k−1)dxkp(yk∣xk)p(xk∣y1:k−1)
其中:
p ( y k ∣ x k ) ∼ N ( H k x k , V k ) p(y_k|x_{k})\sim N(H_kx_{k},V_k)\\[3mm] p(yk∣xk)∼N(Hkxk,Vk)
代入积分计算得到(积分过程忽略):
p ( x k ∣ y 1 : k − 1 ) ∼ N ( μ k , P k ) μ k = μ ^ k + K ( y k − H k μ ^ k ) P k = P ^ k − K H k P ^ k K = P ^ k H k T ( H k P ^ k H k T + V t ) − 1 p(x_k|y_{1:k-1})\sim N(\mu_k, P_k)\\[3mm] \mu _k=\hat \mu_k+K(y_k-H_k\hat \mu_k)\\[3mm] P_k=\hat P_{k}-KH_k\hat P_{k}\\[3mm] K=\hat P_kH_k^T(H_k\hat P_kH_k^T+V_t)^{-1} p(xk∣y1:k−1)∼N(μk,Pk)μk=μ^k+K(yk−Hkμ^k)Pk=P^k−KHkP^kK=P^kHkT(HkP^kHkT+Vt)−1
于是就得到了卡尔曼滤波的五个主要公式。
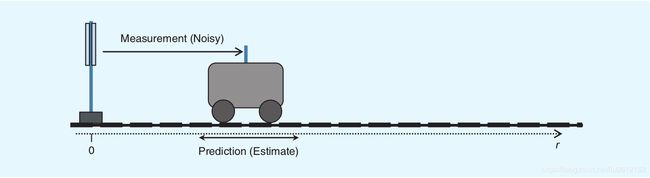
一个小例子:
有一辆小车,它从一个起点出发,你在之后需要每时每刻知道它的位置,小车上装有一个GPS可以对位置进行测量,但是GPS的测量不可能完全准确,它是有误差的,此时如何才能获取更精准的小车位置呢(如下图所示)?
首先确定系统方程:
x t = x t − 1 + ( T t − T t − 1 ) u t + w t (3) x_{t}=x_{t-1}+(T_t-T_{t-1})u_{t}+w_t \tag{3} xt=xt−1+(Tt−Tt−1)ut+wt(3)
和观测方程
z t = x t + v t (1) z_t=x_t+v_t \tag{1} zt=xt+vt(1)
式中 x t x_t xt为t时刻小车真实位置,z为GPS测量值,T为时间,u为速度,w为传递噪声,v为观测噪声,符合标准正态分布,它反应的是测量与实际真值的误差,可以预先测量得到。直接套用KF的五个公式如下:
x ^ t = x t − 1 + ( T t − T t − 1 ) u t p ^ t = p t − 1 + w t K = p t − 1 + w t p t − 1 + w t + v t x t = x ^ t + K ( z t − x ^ t ) p t = p ^ t − K p ^ t = v t ( p t − 1 + w t ) p t − 1 + w t + v t \hat x_t=x_{t-1}+(T_t-T_{t-1})u_t\\[3mm] \hat p_t=p_{t-1}+w_t\\[3mm] K=\cfrac{p_{t-1}+w_t}{p_{t-1}+w_t+v_t}\\[3mm] x_t=\hat x_t+K(z_t-\hat x_t)\\[3mm] p_t=\hat p_t-K\hat p_t=\cfrac{v_t(p_{t-1}+w_t)}{p_{t-1}+w_t+v_t} x^t=xt−1+(Tt−Tt−1)utp^t=pt−1+wtK=pt−1+wt+vtpt−1+wtxt=x^t+K(zt−x^t)pt=p^t−Kp^t=pt−1+wt+vtvt(pt−1+wt)
由此就得到t时刻的系统状态。
扩展卡尔曼滤波(EKF,Extended Kalman Filter)
卡尔曼滤波基于系统是线性系统的这一个假设,对其在实际的应用产生了很大的局限,因此扩展卡尔曼滤波推翻了这一假设,并提出了新的假设:
假设系统是连续变化的,即系统在一个迭代周期内变化很小。
基于以上假设,可以将非线性方程在局部线性化,对其进行一阶泰勒展开,由于 p ( x k − 1 ∣ y 1 : k − 1 ) ∼ N ( μ k − 1 , P k − 1 ) p(x_{k-1}|y_{1:k-1})\sim N(\mu_{k-1},P_{k-1}) p(xk−1∣y1:k−1)∼N(μk−1,Pk−1),于是系统方程和观测方程变为:
x k = f ( μ k − 1 , u k , w k ) + d f d x k − 1 ( x k − 1 − μ k − 1 ) y k = h ( μ ^ k , v k ) + d h d x k ( x k − μ ^ k ) F k = d f d x k − 1 H k = d h d x k x_k=f(\mu_{k-1},u_k,w_k)+\cfrac{df}{dx_{k-1}}(x_{k-1}-\mu_{k-1})\\[3mm] y_k=h(\hat \mu_{k},v_k)+\cfrac{dh}{dx_{k}}(x_{k}-\hat \mu_{k})\\[3mm] F_k=\cfrac{df}{dx_{k-1}}\\[3mm] H_k=\cfrac{dh}{dx_{k}} xk=f(μk−1,uk,wk)+dxk−1df(xk−1−μk−1)yk=h(μ^k,vk)+dxkdh(xk−μ^k)Fk=dxk−1dfHk=dxkdh
剩下的计算步骤与卡尔曼滤波一致。
Error-State卡尔曼滤波(ESKF)
本部分主要参考Quaternion kinematics for the error-state Kalman filter,下文提到文献均指代这个。由于ESKF整个推导过程极为繁琐,因此本文旨在尽可能简化的抽取梗概,从大体上理解ESKF,再结合参考文献中的细节,即可了解全貌。
直接法滤波与间接法滤波
直接法滤波:模型系统方程直接描述系统状态,不存在转化过程。一般使用的KF与EKF都属于直接法滤波。
间接法滤波:模型系统方程描述系统误差,需要通过转换得到系统状态。ESKF(Error-State Kalman Filter)是一种典型的间接法滤波,其预测和更新过程都是针对系统的误差状态,再将修正后误差状态修正系统状态。
流程如下:
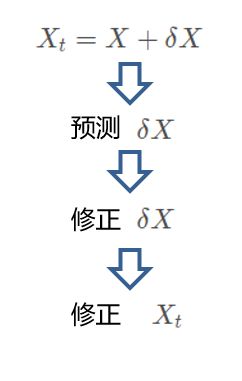 ESKF的核心在于将状态分解为两个部分组成:
ESKF的核心在于将状态分解为两个部分组成:
X t = X + δ X (1) X_t=X+\delta X\tag1 Xt=X+δX(1)
其中 X t X_t Xt为系统状态真值, X X X为Nominal state, δ X \delta X δX为Error state,以下所有公式中均符合这个定义,结合下图理解可能更直观一点:

predict过程
根据IMU中值积分模型,可直接得到X_t 的一阶导数:
X ˙ t = U t ( X t , u m , i ) (2) \dot X_t=U_t(X_t,u_m,i)\tag2 X˙t=Ut(Xt,um,i)(2)
u m , i u_m,i um,i 为IMU的测量值和各类噪声,下文不重复标注了,上式对应文献中式235。
提取所有状态量主成分,构建一个Nominal state的动力学模型:
X ˙ = U ( X , u m ) (3) \dot X=U(X,u_m)\tag3 X˙=U(X,um)(3)
这个模型是自行构建的,理论上是可以根据需要调整的,注意观测,这个模型是完全不受噪声分量影响的,因为噪声分量的影响都放到了Error-state的动力学模型中。上式对应文献中式237。
有(1)(2)(3)就可以推导得到Error-state的动力学模型了,方法是对(1)进行求导,将(2)(3)带入进去求解即可,其中对于速度分量和旋转分量的推导有一些麻烦,因为设计对旋转量的求导,其他都好推。此时得到:
δ X ˙ = U δ ( X , δ x , u m , i ) (4) \dot{\delta X}=U_{\delta}(X,\delta x,u_m,i)\tag4 δX˙=Uδ(X,δx,um,i)(4)
上式对应文献中式261。
对(3)(4)积分可得到离散时间下的系统递推方程为:
X k + 1 = f ( X k , u m ) δ X k + 1 = f δ ( X k , δ X k , u m , i ) (5) X_{k+1}=f(X_{k},u_m)\\[3mm] \delta X_{k+1}=f_{\delta}(X_k,\delta X_{k},u_m,i)\tag5 Xk+1=f(Xk,um)δXk+1=fδ(Xk,δXk,um,i)(5)
积分过程参考文献4.6,上式对应文献中260与261。有了系统递推方程后,剩下的部分就跟EKF基本一模一样了,将Error-state方程线性化为:
δ X x + 1 = F δ ( X , u m ) δ X k + F i i (6) \delta X_{x+1}=F_{\delta}(X,u_m)\delta X_k+F_ii\tag 6 δXx+1=Fδ(X,um)δXk+Fii(6)
这里 F δ F_{\delta} Fδ、 F i F_i Fi为 f δ f_{\delta} fδ对 δ X 、 i \delta X、i δX、i的雅可比矩阵,实际上根据该文献的推导,在推导误差系统方程过程中,大量的高阶项已经被忽略,这里已经是一个线性模型,不需要额外的求导操作了。这就是predict部分最核心的公式了,有了这个线性模型,predict部分就退化为一般针对Error-state的EKF,套用EKF的predict公式即可:
δ X ^ x + 1 = F δ ( X , u m ) δ X ^ k P ^ k + 1 = F δ P ˇ k F δ T + F i Q i F i T (7) \delta \hat X_{x+1}=F_{\delta}(X,u_m)\delta \hat X_k\\[3mm] \hat P_{k+1}=F_{\delta}\check P_kF_{\delta}^T+F_iQ_iF_i^T \tag 7 δX^x+1=Fδ(X,um)δX^kP^k+1=FδPˇkFδT+FiQiFiT(7)
update过程
假设观测方程为:
Y = h ( X t ) + v (8) Y=h(X_t)+v\tag 8 Y=h(Xt)+v(8)
套用EKF的update公式如下:
K = P ^ k + 1 H T ( H P ^ k + 1 H T + V ) − 1 δ X ˇ k + 1 = K ( Y − h ( X ^ t , k + 1 ) ) P ˇ k + 1 = ( I − K H ) P ^ k + 1 (9) K=\hat P_{k+1}H^T(H\hat P_{k+1}H^T+V)^{-1}\\[3mm] \delta \check X_{k+1}=K(Y-h(\hat X_{t,k+1}))\\[3mm] \check P_{k+1}=(I-KH)\hat P_{k+1} \tag 9 K=P^k+1HT(HP^k+1HT+V)−1δXˇk+1=K(Y−h(X^t,k+1))Pˇk+1=(I−KH)P^k+1(9)
整个过程其实跟EKF完全一样,ESKF与EKF的唯一不同是,式子中的H矩阵是h相对于Error-state的雅可比矩阵。换一种更容易理解的方式,因为 X t = X ⊕ δ X X_t=X\oplus\delta X Xt=X⊕δX ,Nominal state已知, h ( X t ) h(X_t) h(Xt)自然就退化为针对Error-state的方程,结合(7)就是一个完全的EKF了。
剩下唯一一个问题就是求解H矩阵,这里直接采用链式法则求解即可:
H ≜ d h d X t ∣ X d X t d δ X ∣ X (10) H\triangleq \frac{dh}{dX_t}_{|X}\frac{dX_t}{d\delta X}_{|X}\tag{10} H≜dXtdh∣XdδXdXt∣X(10)
具体的计算过程参考该文献吧,这里不展开了。
为什么使用ESKF?
1、Error-State的值一般趋近于0,可以避免一些一阶部分可能出现的奇点、应用于惯导系统时的万向锁问题等,提供了在所有时间段内的线性有效性保证。
2、Error-State的值一般很小,可以保证在泰勒展开式中的二次部分忽略不计,使得雅可比矩阵的计算非常快速且简单,有些系统中的雅可比矩阵甚至可以被认为是一个常数或者状态幅值。
3、Error-State动力系统通常比较缓慢,因为所有较大的分量被集成在了nominal-state当中,这就意味着我们可以使卡尔曼滤波的更新过程频率低于预测过程,如下所示。

.
总结
KF、EKF、ESKF的联系
1、本质上都属于贝叶斯滤波,是贝叶斯滤波的具化形式之一,遵循贝叶斯滤波基础理论。
2、实现流程和计算方法大体一致,只在细节上由差别。
3、由于都基于马尔可夫性假设,都存在无法考虑都历史状态从而可能使稳定性下降的问题。
KF、EKF、ESKF的区别
1、KF于EKF是直接法滤波的代表,直接处理系统状态;ESKF是一种间接法滤波,处理系统误差状态。
2、EKF可广泛应用于非线性系统中,ESKF目前主要在惯导系统应用较多,KF只能应用于线性系统。
3、EKF由于每次迭代都需要计算雅可比矩阵,计算复杂度最高,ESKF次之,KF计算最快,对于现代计算机而言计算消耗很小。
与其他滤波方法的区别
1、粒子滤波:本质上也是贝叶斯滤波的一种,相比较于KF系列,其应用范围更广,不基于非线性系统和高斯噪声的假设,直接用采样的方式逼近系统状态真值,缺点是需要样本越多,精度越高,但计算量也越大。
2、滑动窗口滤波:相比较于KF系列,会考虑一定时间内的历史系统状态,对于局部的系统状态跳变有更好的适应性,但会造成输出延迟等问题。
3、均值滤波:一般应用于滑动窗口滤波中,计算量小且能够起到一定平滑的作用,但当状态分布不均衡时会造成输出偏移。