点云关键点、对应关系、热力图可视化总结
点云可视化常用的库是open3d,其中关于关键点、对应关系、热力图的可视化却几乎没有博客讲解,本文填补这一空缺,为点云配准的研究工作提供便利
关键点可视化
关键点可以在显著图上采样得到,使用keypoints_to_spheres函数可以可以绘制出球状的关键点,其中radius参数控制球的半径
import torch
import open3d as o3d
import numpy as np
def sample_interest_points(method, scores, N):
"""
We can do random sampling, probabilistic sampling, or top-k sampling
"""
assert method in ['prob', 'topk', 'random']
n = scores.size
if n < N:
choice = np.random.choice(n, N)
else:
if method == 'random':
choice = np.random.permutation(n)[:N]
elif method == 'topk':
choice = torch.topk(torch.from_numpy(scores), N, dim=0)[1].numpy()
elif method == 'prob':
idx = np.arange(n)
probs = (scores / scores.sum()).flatten()
choice = np.random.choice(idx, size=N, replace=False, p=probs)
return choice
def keypoints_to_spheres(keypoints, color):
spheres = o3d.geometry.TriangleMesh()
for keypoint in keypoints.points:
sphere = o3d.geometry.TriangleMesh.create_sphere(radius=0.015)
sphere.translate(keypoint)
spheres += sphere
if color == 1:
spheres.paint_uniform_color([1, 0, 0])
else:
spheres.paint_uniform_color([0, 0, 1])
return spheres
if __name__ == '__main__':
src_raw = np.load('../src_raw_19.npy')
# scores = np.load('../scores.npy')
M, _ = src_raw.shape
scores = np.random.uniform(0,1,M)
src_idx = sample_interest_points('prob', scores, 500)
src_keypts = src_raw[src_idx]
raw1 = o3d.geometry.PointCloud()
raw1.points = o3d.utility.Vector3dVector(src_raw)
raw1.estimate_normals()
radii = [0.005, 0.01, 0.02, 0.04]
rec_mesh1 = o3d.geometry.TriangleMesh.create_from_point_cloud_ball_pivoting(
raw1, o3d.utility.DoubleVector(radii))
raw1.paint_uniform_color([107/255, 175/255, 214/255])
keypts1 = o3d.geometry.PointCloud()
keypts1.points = o3d.utility.Vector3dVector(src_keypts)
mesh_box1 = keypoints_to_spheres(keypts1, 1)
o3d.visualization.draw_geometries([raw1, rec_mesh1, mesh_box1])

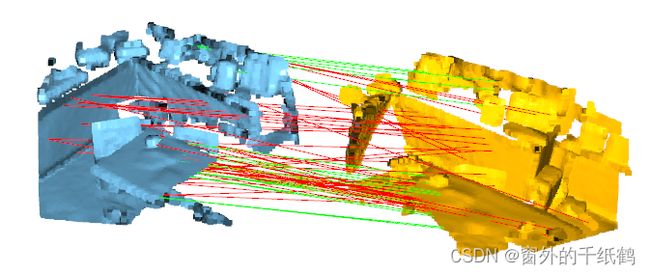
对应关系可视化
建立对应关系(correspondences)是点云配准的重要步骤,可以通过匹配算法(如最近邻匹配,ransac, sinkhorn)等方法得到对应关系。我们通常希望直观看到我们预测的对应关系有哪些是正确的,哪些是错误的。真值可以根据变换矩阵变换点云之后判断对应点,下图中绿色线代表正确对应关系,红色线代表错误对应关系。
import glob,os
import open3d as o3d
import numpy as np
import torch
from matplotlib import cm
def sample_interest_points(method, scores, N):
"""
We can do random sampling, probabilistic sampling, or top-k sampling
"""
assert method in ['prob', 'topk', 'random']
n = scores.size
if n < N:
choice = np.random.choice(n, N)
else:
if method == 'random':
choice = np.random.permutation(n)[:N]
elif method == 'topk':
choice = torch.topk(torch.from_numpy(scores), N, dim=0)[1].numpy()
elif method == 'prob':
idx = np.arange(n)
probs = (scores / scores.sum()).flatten()
choice = np.random.choice(idx, size=N, replace=False, p=probs)
return choice
def keypoints_to_spheres(keypoints, color):
spheres = o3d.geometry.TriangleMesh()
for keypoint in keypoints.points:
sphere = o3d.geometry.TriangleMesh.create_sphere(radius=0.050)
sphere.translate(keypoint)
# sphere.paint_uniform_color(color[i])
spheres += sphere
# spheres.vertex_colors = o3d.utility.Vector3dVector(color)
spheres.paint_uniform_color(color)
return spheres
src_raw = np.load('../src_raw.npy')
tgt_raw = np.load('../tgt_raw.npy')
src_pcd = np.load('../src_pcd.npy')[:70]
tgt_pcd = np.load('../tgt_pcd.npy')[:70]
gt = np.load('../gt.npy')
src_raw = src_raw.dot(gt[:3,:3].T) + gt[:3,3]
src_pcd = src_pcd.dot(gt[:3,:3].T) + gt[:3,3]
# 拉大点云距离,方便可视化
delta = [3,0.2,0.5]
src_raw += delta
src_pcd += delta
# 可视化关键点和源点云
pcd1 = o3d.geometry.PointCloud()
pcd1.points = o3d.utility.Vector3dVector(src_raw)
pcd1.estimate_normals()
radii = [0.005, 0.01, 0.02, 0.04]
rec_mesh1 = o3d.geometry.TriangleMesh.create_from_point_cloud_ball_pivoting(
pcd1, o3d.utility.DoubleVector(radii))
pcd1.paint_uniform_color([249/255, 180/255, 2/255])
pcd2 = o3d.geometry.PointCloud()
pcd2.points = o3d.utility.Vector3dVector(tgt_raw)
pcd2.estimate_normals()
radii = [0.005, 0.01, 0.02, 0.04]
rec_mesh2 = o3d.geometry.TriangleMesh.create_from_point_cloud_ball_pivoting(
pcd1, o3d.utility.DoubleVector(radii))
pcd2.paint_uniform_color([107 / 255, 175 / 255, 214 / 255])
# 画线
frag = np.concatenate([src_pcd, tgt_pcd], 0)
n = src_pcd.shape[0]
lines = np.zeros([n, 2])
lines[:, 0] = np.linspace(0, n - 1, n)
lines[:, 1] = np.linspace(0, n - 1, n) + n
line_set = o3d.geometry.LineSet(
points=o3d.utility.Vector3dVector(frag),
lines=o3d.utility.Vector2iVector(lines),
)
# 判断哪些是正确的线
src_points_T = src_pcd - delta
mask = np.sum((src_points_T - tgt_pcd)**2,axis=1) < 0.1
colors = np.zeros((n,3))
colors[mask] = [0,255,0]
colors[~mask] = [255,0,0]
line_set.colors = o3d.utility.Vector3dVector(colors)
# 可视化对应关系
o3d.visualization.draw_geometries([pcd1,pcd2,line_set])
热力图可视化
点云热力图即根据每个点的取值赋予其相应的颜色,整体上形成一个颜色分布图。比如当我求得了显著性的分布图(M × \times × 1维),则可以使用cm.get_cmap函数计算其颜色,又或者当求得特征图时(M × \times × 32维),需要先用tsne降维到(M × \times × 1),再用同样流程可视化。
import open3d as o3d
import numpy as np
import matplotlib.pyplot as plt
from matplotlib import cm
from sklearn.manifold import TSNE
def make_open3d_point_cloud(xyz, color=None):
pcd = o3d.geometry.PointCloud()
pcd.points = o3d.utility.Vector3dVector(xyz)
if color is not None:
pcd.colors = o3d.utility.Vector3dVector(color)
return pcd
def get_color_map(x):
# colours = plt.cm.Spectral(x)
viridis = cm.get_cmap('Oranges', 8)
colours = viridis(x).squeeze()
return colours[:, :3]
def embed_tsne(data):
"""
N x D np.array data
"""
tsne = TSNE(n_components=1, verbose=1, perplexity=40, n_iter=300, random_state=1)
tsne_results = tsne.fit_transform(data)
tsne_results = np.squeeze(tsne_results)
tsne_min = np.min(tsne_results)
tsne_max = np.max(tsne_results)
return (tsne_results - tsne_min) / (tsne_max - tsne_min)
if __name__ == '__main__':
show_saliency = True
show_feature = False
xyzr0 = np.load('../src_raw_19.npy')
M, _ = xyzr0.shape
if show_saliency:
# 每个点有一个显著性得分,可视化显著性热力图
# scores = np.load('../data/scores.npy')
scores = np.random.uniform(0,1,M)
elif show_feature:
# 每个点有一个特征向量,则先用tsne降维,再可视化
# feature = np.load('../data/feature.npy')
feature = np.random.rand(M, 32)
scores = embed_tsne(feature)
else:
scores = None
exit()
scores = (scores - np.min(scores)) / (np.max(scores) - np.min(scores))
color = get_color_map(scores)
pcd = make_open3d_point_cloud(xyzr0, color)
o3d.visualization.draw_geometries([pcd])
以下展示随机生成一个显著性图的热力图可视化结果:
