论文翻译--毫米波三维全息摄影的轻量级FMIST启发稀疏重建网络(1)
毫米波三维全息摄影的轻量级FMIST启发稀疏重建网络
摘要:压缩感知(CS)与毫米波(mmW)全息技术的集成在实现机载硬件轻量化、低采样比和高速传感方面显示出巨大的潜力。然而,传统的cs驱动算法往往受到参数调整不简单和大量迭代带来的计算开销过大的限制。为了解决这一问题,我们结合快速迭代收缩阈值算法(FISTA)的可解释性和数据驱动的深度神经网络的无调优优点,提出了一种轻量级的基于模型的深度学习框架(LFIST-Net)。首先,将单频全息成像技术集成到FISTA中作为传感核,避免了大规模的矩阵乘法。随后,将基于内核的FISTA (KFISTA)映射为层固定、参数可学习的LFIST-Net,并将权值放宽为层变化的。对LFIST-Net中的关键参数(步长、阈值和动量系数)的更新采用软加函数进行正则化,保证了算法的非负性和单调性。在三维全息实现方面,采用“1-D + 2-D”方案,其中匹配滤波(MF)和训练有素的LFIST-Net对方位片进行距离聚焦和重建。在不损失效率的情况下,距离聚焦子波以三维立方体的形式并行处理。基于商用毫米波雷达的仿真和实测实验证明,LFIST-Net能够精确重建成像场景。特别是,在近场毫米波三维全息测试中,数值和视觉结果都表明,与基于mf、传统cs驱动和基于网络的方法相比,LFIST-Net在保持较高计算速度的同时,具有令人瞩目的重构性能。
1介绍
近场三维毫米波全息术在微波理论和技术领域得到了广泛关注。毫米波,具有对大多数非金属材料合理的穿透性能和未知的优点在中等功率水平的健康危害方面,在无损评估[1]、[2]、隐蔽武器探测[3]、[4]和生物医学诊断[5]、[6]方面显示了巨大的潜力。近年来,合成孔径雷达(SAR)理论在毫米波和太赫兹波成像中得到了广泛的应用。与实际孔径雷达相比,SAR在方位角方向上具有较高的分辨率。本文所述的三维全息系统与SAR具有相同的理论支持,利用频率扫频宽带信号对成像空间(图1)进行查询,以揭示距离方向上的空间分布。针对扫描模式下的成像样机,基于传感器与被测样品之间的相对运动,合成了虚拟二维孔径,保证了方位面上的分辨率。此外,为了在方位面上获得满意的成像质量,还必须考虑两个关键因素,即横向距离图像分辨率和空间采样准则,根据这些准则确定所需的采样点数量和回波数据量。受以上限制,高空间分辨率需要比奈奎斯特采样理论更小的采样间隔,以避免混叠并保持重构图像的纹理。然而,由于测量过程的采集时间较长,近场三维SAR全息的数据采集对许多应用提出了挑战。因此,它具有显著的潜力来减少所需空间样本的数量,从而减少采集时间。最近出现的压缩感知(CS)理论[7]已被证明具有从稀疏采样回波中提高成像质量的巨大潜力。在过去的几十年里,CS在许多领域得到了广泛的研究和成功的应用,包括但不限于磁共振成像(MRI)[8]、[9]、稀疏编码[10]、雷达信号处理[11]。上述应用程序的内核问题可以归类为所谓的“逆问题”。一般来说,在CS处理的经典流程中,这类问题通常被建模为求解欠定方程组,从而转化为正则化优化问题
![]()
式中F (u)为线性测量方程,用反问题求解。它总是限制测量的保真度。R(u)被称为正则项,是一个可分离的连续惩罚。λ控制两者之间的权衡约束。为了解决这一问题,人们开发了无数的技术,即所谓的追踪算法。追踪算法可分为两类。第一组是贪心方法,采用“0”正则化,顺序地恢复u的系数,如正交匹配追踪(OMP)[12]。第二种方法称为基追踪,采用“1”正则化,形成凸目标函数,如迭代收缩阈值算法(ISTA)[13]、快速迭代收缩阈值算法(FISTA)[14]、近似消息传递(AMP)算法[15]。在SAR成像领域,许多先驱工作已经成功地应用了这些成熟的重建算法。例如Han等[16]对ISTA进行了修改,提出了一种改进的自适应ISTA (IAISTA)用于机载SAR层析成像的三维重建。Peng等人[17]提出了一种结合极坐标格式和1正则化的三维SAR图像重建算法。Jiao等人[18]提出了一种新的基于背景信息的三维SAR成像方法,其中利用局部高斯马尔可夫随机场(LGMRF)来探索SAR图像的背景信息。Bi等人[19]提出了一种多频二维CS SAR重建方法,将分裂Bregman更新与并行类fsa算法的变化相结合。Nguyen等人[20]提出了一种参数细化的OMP算法来解决旋转目标CS雷达成像中字典错配问题。
另一方面,现有的CS SAR成像方法大多高度依赖于线性测量模型,寻求直接在时域建立线性映射。由于其直观的建模视角,这类成像方案得到了广泛的研究。例如Wu等[21]提出了一种基于实值稀疏表示的稀疏恢复算法。该方案通过建立稀疏采样回波与矢量表示散射系数之间的线性测量方程,采用FISTA技术重建三维图像。然而,该模型中的感知矩阵是非稀疏的;换句话说,它们的元素是非零的。同时,由于类正弦响应,矩阵也是非正交的,这限制了大规模矩阵反演加速算法的实现。此外,矩阵矢量观测模型将原始回波和散射系数转换为矢量,挑战了计算能力,限制了其在实际广泛成像场景中的应用。最近,一种缓解这一缺陷的吸引人的方法是设计基于内核的度量模型。Quan等人[22]将基于反向投影的距离-方位解耦算子(BP-RADOp)与复杂的AMP (CAMP)相结合,提出了一种称为BP-CAMP的SAR成像算法。此外,在[23]中提出了一种高效的CS重建方案,该方案采用了一种不需要插值的全息成像算法作为感知算子。
此外,还有许多研究人员致力于基于先验的分析。基于一个具体的应用,采用一个设计良好的正则化项来提取某种先验信息,以提高解的质量。Beck和Teboulle[24]研究了全变分(TV)最小化模型,提出了一种基于电视约束的图像去毛刺问题的快速实现方案。在[25]中,利用联合稀疏性和低秩性从欠采样SAR原始数据重建SAR图像。更复杂的是,Tang等人[26]提出了一种针对静止目标的穿墙雷达成像(TWRI)的新方法,通过详细阐述一个包含低秩、联合稀疏性和电视惩罚的优化模型。此外,还探索了许多其他复杂的正则化方法,如组稀疏性[27]、基于cauchy的惩罚[28],甚至即插即用(PnP)先验技术[29]。事实上,更复杂或设计良好的先验正则化可能会提高解决方案的质量,但优化过程将相应地挑战成像系统的计算能力。此外,参数的调优也将是重要的。
为了解决上述问题,最近出现了一个想法,系统地将迭代算法展开到层次计算图中。该框架得到了信号和图像处理界的广泛关注。许多研究人员已经成功地将深度神经网络与领域知识和数学优化模型结合在[30]-[32]逆问题中。也就是说,优化步骤可以“指导”我们用一种新的计算图来设计网络。Gregor和LeCun[33]提出了一个训练非线性前馈预测器的新想法,被称为习得ISTA (LISTA)。本质上,它可以看作是ISTA的可训练版本,对收缩函数采用了可学习的阈值变量,在相同的逼近误差下,比传统的ISTA计算量少十倍。此外,[34]中提出了两个版本的深度展开框架,称为ADMM-CSNet。受模型驱动深度学习思想的启发,ADMM- csnet将传统的ADMM优化方法与数据驱动学习方法相结合进行图像重建。同样,ISTA- net[35]也是将传统的ISTA转换为深度网络形式。此外,非线性变压器被有效地集成到stanet的近端映射步骤。这种先驱者的作品也可以在最近出版的一系列刊物[36]-[38]中找到。除了在自然图像处理和磁共振成像方面的广泛应用外,近年来取得了一些进展模型驱动的深度学习框架的研究也引发了SAR成像应用领域研究活动的显著扩散。作为一个典型的例子,Xiong等人[39]提出了一种参数可学习的用于SAR成像和去噪的SPB-Net。基于Radarsat1原始数据的实验验证了SPB-Net的实时处理能力。此外,在[40]中,提出了一种新的聚束SAR成像PnP- cnn -SAR成像框架。然而,该技术在三维毫米波成像中的应用研究还很少。最近[41]发表的一篇相关工作提出了一种基于模型的全息网络(MB-HoloNet),而这篇工作主要针对Gabor全息成像系统。并且本文所建立的测量模型仍然是线性方程,由于需要进行大规模的矩阵计算,不能直接应用于近场毫米波三维全息。
在这项工作中,我们致力于毫米波三维全息技术的研究。为了减少空间样本数量和提高处理速度,提出了一种轻量级稀疏重建网络LFIST-Net。传统的cs图像生成方案通常基于线性测量模型,高度依赖矩阵向量表示,导致计算量较大。受到pf Li等人[23]工作的启发,将单频(SF)全息成像技术[42]改进为一种传感算子,用以替代传统的传感矩阵。标准SF全息处理仅包含二维傅里叶变换(FT)和阿达玛积,在相同成像范围内,比大规模矩阵乘法具有更高的计算效率。尽管SF全息术在全采样条件下表现良好,但当采样比低于奈奎斯特准则时,其性能仍会严重恶化。因此,我们将SF全息传感算子与FISTA相结合,提出了一种改进的基于核的FISTA (KFISTA),融合了实时处理和高质量稀疏重建的优点。但是,不可避免的是,KFISTA的参数调整仍然是手工制作的,总是需要付出巨大的努力来优化。因此,将KFISTA的迭代步骤展开为一个具有固定更新层的层次结构,即LFIST-Net,每一层由三个级联模块组成。采用数据驱动的反向传播(BP)算法对LFIST-Net的参数进行自动优化。此外,参数的更新通过软加函数进行正则化,保证了良好状态优化过程。考虑到实际测量回波样本的缺乏,采用了在已知成像几何的前提下生成的模拟训练集。在成像实现上,采用“1-D + 2-D”方案,利用匹配滤波(MF)和训练良好的LFIST-Net进行距离聚焦和方位面重建。值得注意的是,为了进一步提高效率,每个距离单元中的子回波被平行重构成三维立方体的形式。最后,将二维重建结果在距离方向上进行置桩,得到三维图像。主要的技术贡献在于以下方面。
1)针对毫米波三维全息,提出了一种轻量级的基于模型的深度学习框架(LFIST-Net),弥合了基于模型的CS和数据驱动的深度学习技术之间的差距。与我们之前的工作[43]相比,我们提出的LFIST-Net需要的更新层数(3层)是rmis - net(9层)的三倍,可以达到相似的重建精度,速度也有所提高。
2) LFIST-Net的关键参数端到端自动学习。同时,利用软加函数对LFIST-Net中的参数更新进行了正则化,保证了LFIST-Net的非负性和单调性。
3)改进SF全息成像技术作为传感核,避免大规模矩阵计算,提高网络效率。此外,训练良好的LFIST-Net能够从稀疏采样的回波数据中精确恢复图像,而不会造成振幅衰减。
4)在数值模拟和近场三维毫米波全息测试中,实验结果表明,与基于mf、传统cs驱动和网络的方法相比,LFIST-Net在保持较高计算速度的同时,具有令人满意的重构性能。
其余部分的组织如下:第二节介绍三维成像管道和基于fisti的稀疏重建。第三节介绍了修正KFISTA的基本理论推导。然后介绍了LFIST-Net,包括理论分析、训练方法和成像实现细节。第四节给出了仿真和实测实验结果,并进行了详细的分析和讨论。最后,第五部分为结束语。
2背景
为保证理论完整性,本节首先简要介绍了采用MF和SF全息成像技术分别进行距离聚焦和方位面重建的“1-D + 2-D”成像方案。然后,引入FISTA进行稀疏重建。以上两个方面都是本文方法的理论基础。
A.用于三维毫米波成像的联合MF和SF全息术

图1所示。几何构型和坐标定义。
我们考虑如图1所示的毫米波SAR成像系统。一个宽频毫米波传感器照亮了位于x-y-z笛卡尔空间的SUT。通过x-y方向的扫描,合成了一个平面孔径,使成像系统在方位面具有二维分辨率。设y代表距离方向,x和z分别代表水平和垂直方位方向。如图1所示,Pma = (x, 0, z)表示第m个虚阵元的位置坐标向量,Pns = (x, y, z)表示第n个散射系数σ在成像空间中的位置。假设雷达传感器传输线性频率调制(LFM)脉冲,传播衰减被忽略。设se(Pma, Pns)为单个后向散射的距离聚焦测量值,可以写成

j =√−1χR(·)是模糊度函数,表示天线模式,R代表指数范围细胞,k = 2πf / c是波数,f = k t表示夏令时间频率与k被传输信号的频率斜率,c代表光速。Rmn可以计算为

对于整个成像空间,在第m个虚拟阵列单元Sr Pma中可以形成距离聚焦回波

假设距离压缩后进行了距离单元迁移校正(RCMC)。因此,回波在方位面和距离方向上不耦合。也就是说,每个距离单元中的子波是相互独立的。定义α r, Pns = σ Pns χr(r−Rmn),距离胞内的子贝叶斯可表示为

我们注意到yn与r相关,在不同的时间内,yn是由特定的范围单元确定的。因此,对于距离单元中的子波,逆散射问题自动简化为SF全息二维成像问题,可表示为

其中口r为距离单元r对应的成像空间。利用平稳相位(MSP)[44]方法,将(6)中的指数项分解为平面波分量的叠加,得到

有FT对x→kx和z→kz。空间波数kx、kz在−2k ~ 2k范围内,n天可表示为

利用(7)中的关系,并重新排列积分的顺序,(6)可以改写为
其中FT2D和FT−12D分别为二维正FT和逆FT。最后,利用该公式对距离单元内二维图像的重建进行了总结
![]()
上面讨论的成像技术很大程度上依赖于傅立叶变换的使用,可以使用快速傅立叶变换(FFT)算法非常有效地执行傅立叶变换。但当奈奎斯特准则不满足时,成像方案的性能明显下降。也就是说,相邻虚阵列元之间的间隔必须满足奈奎斯特采样准则,这往往会导致较高的系统复杂度。最近,CS理论展示了显著的潜力,恢复一个稀疏信号的抽样点比奈奎斯特准则。它还能够放松数据存储和降低系统复杂性。在第二节b中,我们将介绍传统的基于fisti的稀疏重建管道。

图2所示。矩阵向量模型向核形式等价转换的示例,其中V ec表示向量化算子。
B.基于fista的稀疏重建
直观上,我们只考虑从一个距离聚焦回波切片中恢复雷达图像α∈Cw×h的矩阵。设Sr∈CNx ×Ny, w re Nx和Ny分别为水平方向和垂直方向的采样点数。参照(6),可以将回声的表述过程紧凑地表述为线性表示模型
![]()
定义u = vec(u)表示将矩阵u排入向量u的运算,则S = vec(Sr), x = vec(α)。M∈CNx Ny×wh被称为测量矩阵,由系统的成像几何和参数决定。它的元素是由

具有指定的向下- sr η, 0< η ?1, S和M将被转换成它们自己的约简集 以随机的方式组成。因此,(11)
![]()
其中φ∈ZηNx Ny×Nx Ny为采样矩阵,Sv∈CηNx Ny为向量表示的测量回波,M∈CηNx Ny×wh为约简测量矩阵。从S中恢复x是众所周知的“逆散射问题”。通常,由于稀疏性,可以建立线性测量模型,寻找特定变换域中最稀疏的解,可表示为
![]()
λ控制测量保真度和稀疏度之间的权衡。∈Cwh×wh表示已知的正交基。·0为0范数,计算非零元素的个数,从而使解具有稀疏性。·2为2范数,限制了测量保真度。问题(14)可以用两类算法求解。第一类被称为贪婪法,它从原问题中依次恢复x的系数。第二组方案提供(14)的松弛,将其转换为凸形式,可写成
![]()
要解决(15),最简单的方法之一是ISTA。(1/k)是什么意思?在[14]中,提出了一个改进的ISTA,称为FISTA,其中引入了动量项,以保证收敛速度为O 1/k2。FISTA迭代以下步骤求解(15)(对于t = 0,1,2,…且x0 = MH Sv)
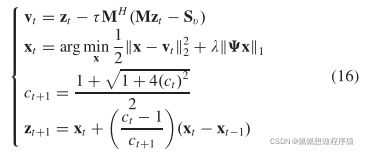
其中,c0 = 1, z1 = x0, τ表示步长,MH表示m的共轭转置。(16)中的第二项是一个经典的最小绝对收缩和选择算子(LASSO)问题,可以通过一个封闭形式的公式,即所谓的近端映射xt ?T (vt,;λ): Cwh→Cwh。其元素的形式如下:
![]()
其中vi是向量v的第i个元素,[v]i是v o t变换的第i个系数h b a s e s e t。在工作中,我们只利用了成像场景固有的稀疏性。换句话说,= I, I是单位矩阵和的大小相同。因此,(17)可以简化为
![]()
上述讨论的CS重建技术广泛应用于SAR稀疏成像,它对信号模型进行转换将式(6)化为矩阵向量形式。值得注意的是,在矩阵-向量模型中,向量化操作往往会形成一个非常大的测量矩阵M,这会导致大量的计算量和较高的内存需求。对于近场三维全息,由于回波数据高维、目标图像尺寸大,矩阵矢量CS不能直接处理三维全息问题。为了解决这一问题,我们提出了一种将SF全息术与FISTA相结合的方位面重建方法。

3方法
在本节中,我们首先介绍了将SF全息术集成到基于fista的稀疏重建步骤中的概念,并提出了一种新的KFISTA方法,以有效地从稀疏采样的回波中重建sut的目标图像。此外,考虑到KFISTA的非trivial参数调整,讨论了KFISTA的深度网络实现方案,同时提出了一种受FISTA启发的轻量级毫米波三维全息稀疏重建网络(LFIST-Net)。
基于FISTA
为避免进行大规模的矩阵向量乘法运算,采用二维全息算子作为测量核来代替FISTA中的测量矩阵。图2显示了从矩阵向量模型到核形式的等价转换。对于距离单元中的subecho,这里,我们直接考虑表示回波数据Sr∈CNx ×Ny和目标图像α∈Cw×h的矩阵。此外,还需要解决图像尺寸总是大于测量值的问题echo,即Nx < w和Ny < h始终成立。假设S = P|0 (Sr)是二维填充零的矩阵,表示echo, P|0(·):CNx ×Ny→Cw×h表示填充零的运算符。因此,测量核H和对应的逆核H可定义为

其中表示阿达玛乘积,N是N的合取式,n被定义为(有错。原文识别不出来)
![]()
其中ky为频率波数变量矩阵。利用SF全息的优势,将矩阵向量线性测量操作替换为二维全息算子,可表示为

其中M∈Zw×h为二维采样矩阵,其元素分别为1和0,分别对应采样点和丢弃点。根据上述定义,(15)变为

考虑(22)中的第一项,并表示F (α) = (1/2) S−H(α) 22。在[23]中证明,F。w。r。t。α的梯度可以计算为

因此,FISTA的迭代步骤可以修改为

式中α0 = H†(S), adz1 = α0。算法1总结了三维毫米波全息术中使用联合MF和KFISTA的处理流程。
但是,KFISTA的参数调优仍然很重要。一旦它们被调优为次优,重建性能将以不可预测的方式相应地恶化。此外,(24)总是需要迭代数百次才能得到满意的重构结果,导致计算效率较低。为了解决这一问题,近年来出现的深展开法得到了广泛的研究。许多开创性的工作,如ISTA-Net[35]、LAMP[45]和ADMM-CSNet[34],已经被提出用于图像CS和快速MRI等应用。深度展开的目的是将算法1中的优化步骤展开到一个深度预先确定的层次网络框架中。通过这样做,KFISTA的迭代阶段以一对一的方式映射到已展开网络的更新层。通常,展开框架拥有的更新层比KFISTA需要迭代的时间要少得多,这节省了计算资源,并支持实时处理。此外,利用深度学习理论,可以自动获取待定参数采用数据驱动的BP算法进行更新,进一步提高了成像质量。第III-B节讨论了KFISTA的深度网络实现方案,并在此基础上详细提出了一种受FISTA启发的轻量级稀疏重构网络(LFIST-Net)。给出了训练细节和参数的更新规律。
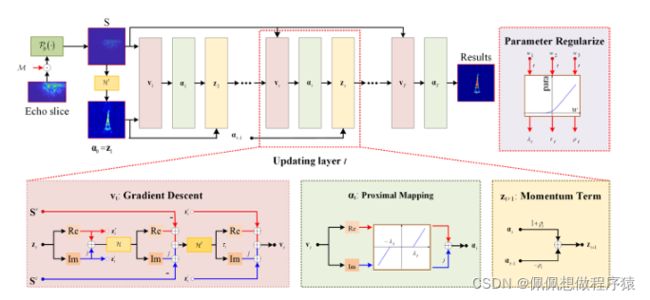
图 3.带有SF全息核的截短KFISTA流图,称为LFIST-Net。数据的实部和虚部分别传播,并以复杂形式处理。红色和蓝色箭头分别表示实路径和虚路径。黑色箭头表示复杂流。H表示SF全息核,H†是H的逆算子,定义在(18)中。所有数据都以二维矩阵的形式进行处理,提高了处理效率。每个更新层由梯度下降、近端映射和动量项三个模块组成。此外,引入了一个附加参数正则化来约束参数的合理优化。