点特征提取及影像相关系数法匹配
一、ReadMe
1. 实习任务
2. 实验数据
3. 编程环境
4. 文件组织结构
二、原理及算法
1. 点特征提取
1.1Moravec算法
1.2Forstner算法
2. 相关系数法匹配
三、编程思路及流程图
1. 点特征提取
1.1Moravec算法
1.2Forstner算法
1.3点特征提取主程序
2. 相关系数法匹配
四、试验结果及分析
1. 点特征提取
1.1结果分析
1.2阈值分析
1.3随机/均匀提取实施
2. 相关系数法匹配
2.1特征点随机分布
2.2特征点均匀分布
!!!!代码在这里哦
一、ReadMe
1.实习任务
本次实习的任务主要包含两大模块:点特征提取、相关系数法匹配。
·点特征提取:利用Moravec或Forstner算法提取影像的特征点,并在影像上显示出来。同时研究兴趣阈值、抑制窗口对结果的影响,以及随机提取和均匀提取的实施分析。
·相关系数法匹配:利用相关系数匹配算法,对两张影像进行匹配,得到同名点,并进行可视化。同时研究匹配窗口、相关系数阈值等对结果的影响。
2.实验数据
本次实习当中所用到的数据均存放于data文件夹中。包含三张图片:
·panLeft.bmp:灰度影像,942x1023
·panRight.bmp:灰度影像,887x805
·chess.bmp:彩色影像,467x638,主要用于检测点特征提取算法的效果
3.编程环境
本次实习当中编程环境如下:
·编程语言:Python
·环境:Python 3.9.7
·第三方库:opencv、numpy、math(其余Moravec、Forstner、匹配算法均为自己编写)
4.文件组织结构
·点特征提取及相关系数匹配:项目总文件夹
·data:实验数据文件夹
·PointFeatureExtraction:点特征提取文件夹
·Moravec(py):Moravec算法
·Forstner(py):Forstner算法
·main(py):点特征提取主程序
·CorrelationCoefficientMatching:相关系数匹配文件夹
·Moravec(py):匹配算法中所用到的Moravec特征提取算法
·main(py):相关系数法匹配的主程序
·Result:实验结果文件夹
·PointFeatureExtraction:点特征提取结果文件夹
·Moravec:Moravec算法结果文件夹
·chess:棋盘数据结果文件夹
·tenniscourt:网球场数据结果文件夹
·Forstner:Forstner算法结果文件夹
·chess:棋盘数据结果文件夹
·tenniscourt:网球场数据结果文件夹
·CorrelationCoefficientMatching:相关系数匹配结果文件夹
·实验报告(docx):实验报告
·ReadMe(txt):项目概述
·illustration:流程图文件夹
二、原理及算法
1.点特征提取
点特征提取是指运用某种算法从影像中提取我们感兴趣的或者有利用价值的点的过程。其中特征点主要指明显点、具有某种特征的点(如灰度特征),提取特征点所用的算子则称为兴趣算子或有利算子。主要的算子有Moravec、Forstner、Harris算子等,具体介绍见下文。
1.1Moravec算法
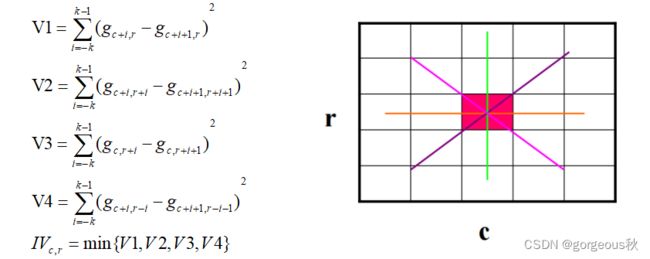
(1)概述:一种基于灰度方差的角点检测算子,该算子计算图像中每个像素点沿着水平、垂直、对角线及反对角线的四个方向的灰度方差,其中的最小值选作该像素点的兴趣值 IV,再通过局部非极大值抑制来检测其是否为特征点(角点)
(2)算法步骤:
1>计算各像元的兴趣值IV:以像素(c,r)为中心的wxw影像窗口中,计算四个方向(垂直、水平、正对角线、反对角线)相邻像素灰度差的平方和,去四个方向的最小值为(c,r)像点的IV
2>得到候选点:给定经验阈值,将兴趣值大于阈值的点作为候选点(阈值的选择应该以候选点中包括所需要的特征点而又不含过多非特征点为原则)
3>非极大值抑制:在一定的抑制窗口内,将候选点中兴趣值最大的点保留作为特征点,其他点去掉
(3)算法特点:
1>简单快速
2>对强边缘比较敏感,这是由于响应值是自相关的最小值而不是差值
3>不是旋转不变的,当图像发生旋转时,检测出的特征点具有较低的重复率
4>对噪声也比较敏感,可以考虑用比较平滑的滤波来消除噪声
1.2Forstner算法
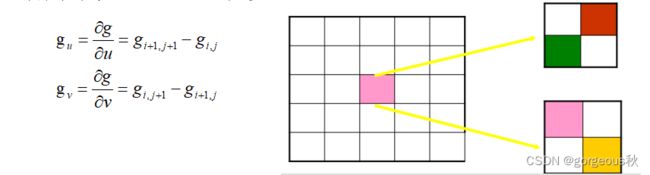
(1)概述:通过计算各像素的Robert’s梯度和像素(c,r)为中心的窗口内的灰度协方差矩阵,在影像中寻找具有尽可能小而接近圆的误差椭圆的点作为特征点
(2)算法步骤:
1>计算个像素的Robert’s梯度
2>计算IxI窗口中的灰度协方差矩阵
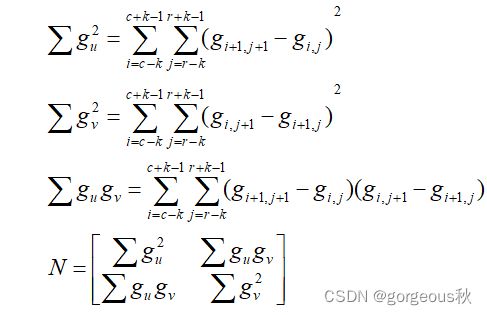
3>计算兴趣值q、w
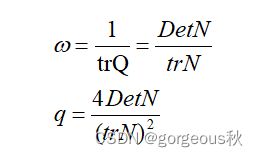
4>确定候选点:当q>Tq同时w>Tw时,该像元为候选点
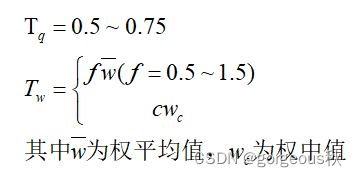
5>非极大值抑制:在一个窗口内,选取权值w最大的候选点作为特征点
(3)算法特点:
1>精度高
2>计算量大
2.相关系数法匹配
(1)概述:基于相关系数来判断搜寻两张影像上的同名点
(2)算法步骤:
1>读取左右影像
2>确定目标点位置:使用Moravec算子或Forstner算子对左影像进行特征点提取,将提取的特征点作为目标点(具体提取步骤见上)
3>预测右影像的搜索范围:使用ps等工具得到左右影像的大致视差,然后根据搜索窗口的大小确定搜索范围(搜索窗口不能太小,否则可能找不到匹配同名点)
4>逐窗口计算相关系数并保存:计算窗口内左影像个右影像灰度的相关系数,并且保存起来。公式如下:
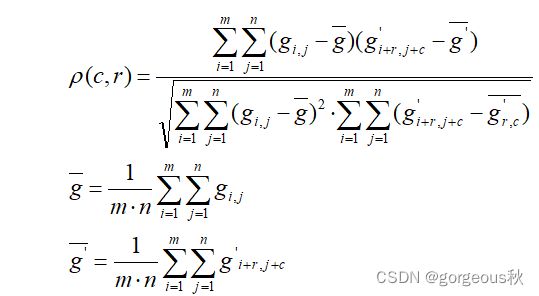
5>比较一个搜索窗口内的相关系数,如果最大值大于相关系数阈值,则该最大值对应的像点则为对应目标点在右影像上的同名点
三、编程思路及流程图
1.点特征提取
1.1Moravec算法
(1)流程图
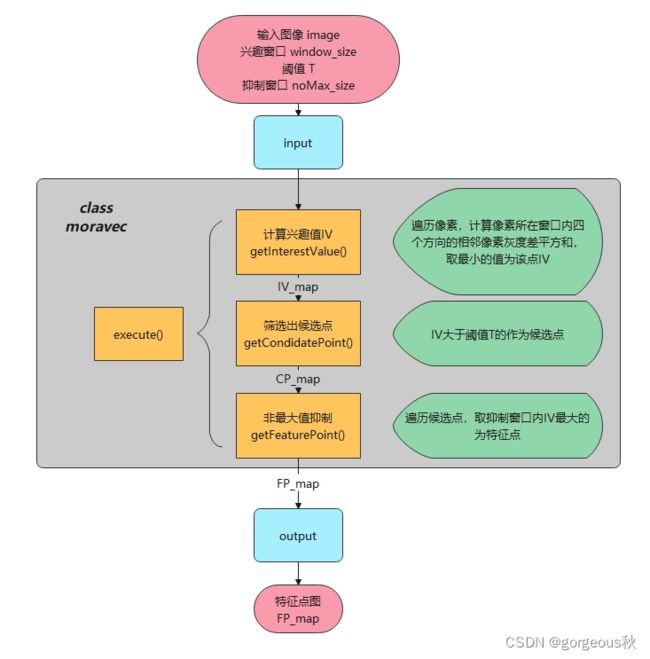 (2)编程思路
(2)编程思路
总体编程架构为:编写moravec类,其包含了getInterestValue、getCondidatePoint、getFeaturePoint、execute等方法来实现特征点的提取。
*代码讲解见完整报告
1.2Forstner算法
(1)流程图
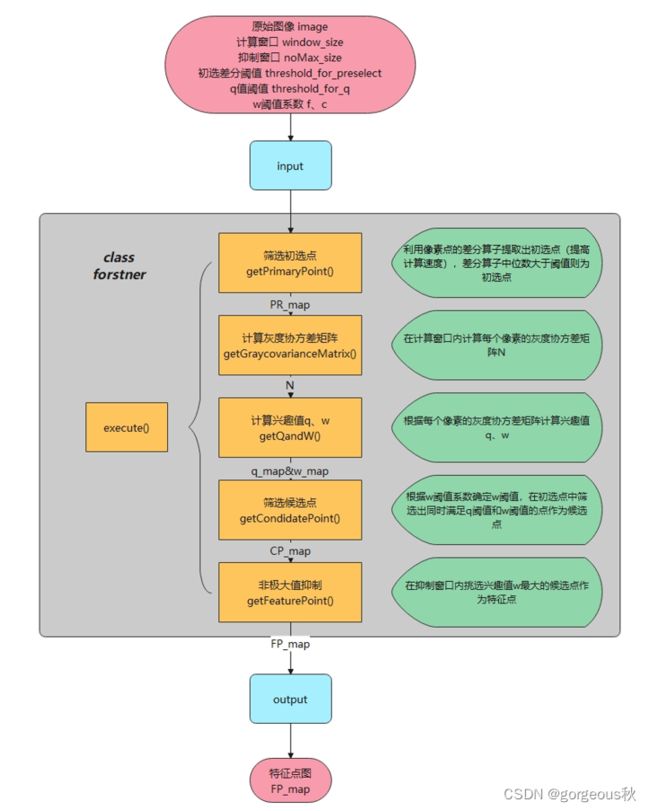
(2)编程思路
总体编程架构为:编写forstner类,其包含了getPrimaryPoint、getGraycovarianceMatrix、getQandW、getCondidatePoint、getFeaturePoint、execute等方法来实现特征点的提取。
*代码讲解见完整报告
1.3点特征提取主程序
本程序主要是进行点特征提取算法主框架编写,进行图片读取、算法选择、特征点标注、结果保存等工作。
2.相关系数法匹配
(1)流程图
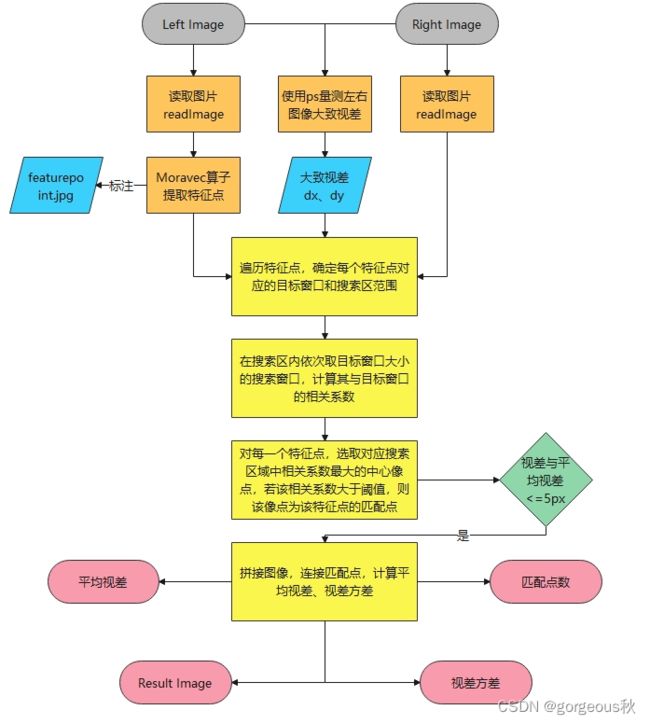
(2)编程思路
相关系数匹配的实现主要是两个模块完成,一个是引用了之前点特征提取中的Moravec类完成算法中的特征提取部分,其与部分(图片读取、匹配、结果保存等)均在main.py中。
*代码讲解见完整报告
四、试验结果及分析
1.点特征提取
1.1结果分析
点特征提取部分我分别使用chess.bmp图像和panLeft.bmp图像进行了实验,具体结果如下。
(1)Moravec算法
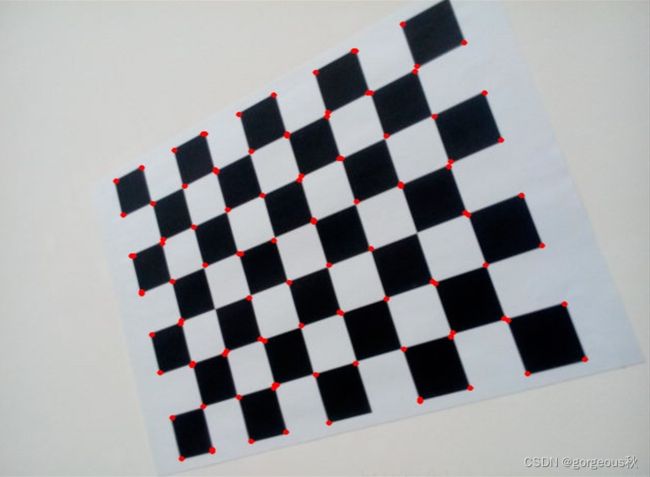
1>chess图像结果:
经过试验,最终结果参数如下:
·阈值:6000
·兴趣窗口大小:5x5
·抑制窗口大小:5x5
由结果图可以知道,Moravec算法完成了大部分角点的提取,但是仍然有些许角点没有提取出来。值得一提的是这些未被提取出来的点大多数靠近图像边界。就运行速度而言,Moravec算法比较快,因为其计算量并不大。总体而言,在小计算量的前提下,比较好的完成了特征点的提取工作。
本项目还保存了Moravec算法运行过程中的兴趣图、候选点图、特征点图,均可在Result->PointFeatureExtraction->Moravec文件夹中查看,在此就不过多引用。
2>panLeft图像结果
经过试验,最终结果参数如下:
·阈值:1200
·兴趣窗口大小:5x5
·抑制窗口大小:5x5
从结果图可以看到Moravec算法将网球场上的人、角点都提取了出来。球场旁边的两棵树上特征点比较多,这应该是由于其灰度变化比较频繁。
(2)Forstner算法
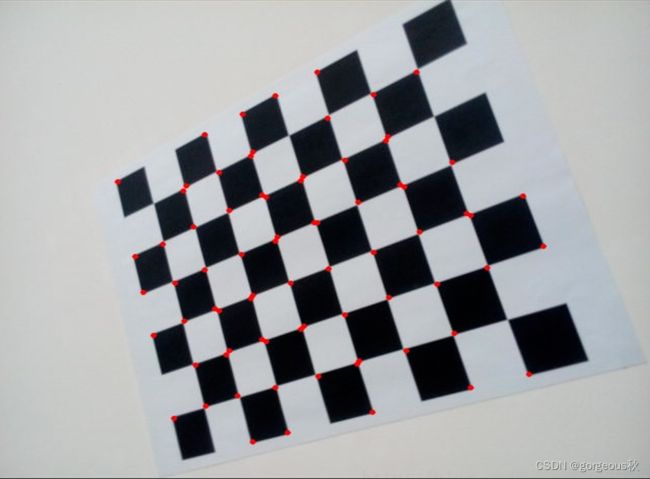
1>chess图像结果
经过试验,最终结果参数如下:
·兴趣窗口大小:5x5
·抑制窗口大小:7x7
·初选阈值:20
·q阈值:0.5
·f、c:0.5、5
由结果图可以知道,Forstner算法完成了所有特征点的提取,效果上比Moravec算法更好,这是因为其计算的灰度协方差矩阵计算量更大,考虑的信息跟充分,但这导致了该算法在速度上较慢一些。
2>panLeft图像结果
经过试验,最终结果参数如下:
·兴趣窗口大小:5x5
·抑制窗口大小:7x7
·初选阈值:20
·q阈值:0.5
·f、c:0.5、5
由结果图可以看到,使用forstner算法提取出的特征点较Moravec算法提取的特征点要少一些,经过分析,认为可能对于这种灰度变化较为细密的图像而言,forstner的初始差分筛选会筛选掉一些不明显的特征点。
1.2阈值分析
点特征提取中阈值会直接影响到特征点的数量,我做了多次试验(部分试验结果如下表)。
就Moravec算法而言,根据计算的兴趣值IV,进行统计分析可以大致判断出较为合理的阈值在1000左右。然后设置多组不同阈值的实验,得到的特征点数目如下,根据结果图像分析,我认为阈值T=1200较为合适。当阈值过大时,一些特征点无法提取出来;当阈值过小时,很多非特征点会被提取出来。
| 阈值T |
特征点数目 |
| 1000 |
306 |
| 1100 |
253 |
| 1200 |
215 |
| 1400 |
152 |
1.3随机/均匀提取实施
特征点提取有两种模式,一是随机提取,即全图使用统一的阈值,只要满足条件则为特征点(上述结果图即为随机提取),但这样也可能会导致一些特征点过于集中(如上图中的树叶有很多特征点),而一些区域又没有特征点。
基于此第二种方法就是均匀提取,即在每个区域内使用一个阈值,以求达到特征点尽量均匀分布的目的,不过这样的操作也有可能导致提取出非特征点。
具体实施方法为:通过降低阈值(比如将T=0),增大抑制窗口大小,来实现随机提取。降低阈值让全图大多数点成为候选点,增大抑制窗口,让一个抑制窗口内只能挑选出一个兴趣值最大的点作为特征点,这样就完成了均匀提取。操作和结果如下图:
2.相关系数法匹配
2.1特征点随机分布
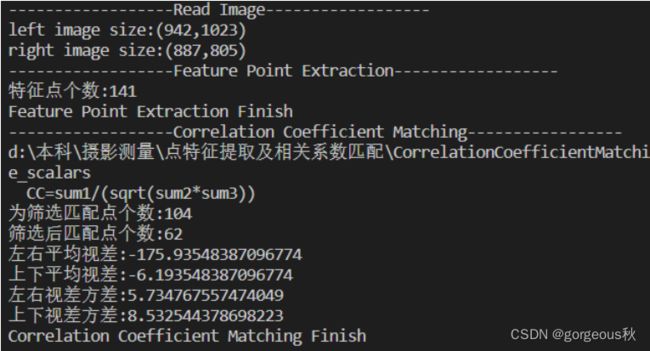
下面是随机目标点的匹配效果图,所用参数如下所示:
·Moravec兴趣阈值:1000
·Moravec兴趣窗口:5x5
·Moravec抑制窗口:5x5
·相关系数匹配计算窗口:7x7
·相关系数匹配搜索区域:21x21
·相关系数阈值:0.85
由计算结果可知,左右视差约为-175.94px,上下视差约为-6.19px。
2.2特征点均匀分布
下面是均匀目标点的匹配效果图,所用参数如下所示:
·Moravec兴趣阈值:0
·Moravec兴趣窗口:5x5
·Moravec抑制窗口:100x100
·相关系数匹配计算窗口:7x7
·相关系数匹配搜索区域:21x21
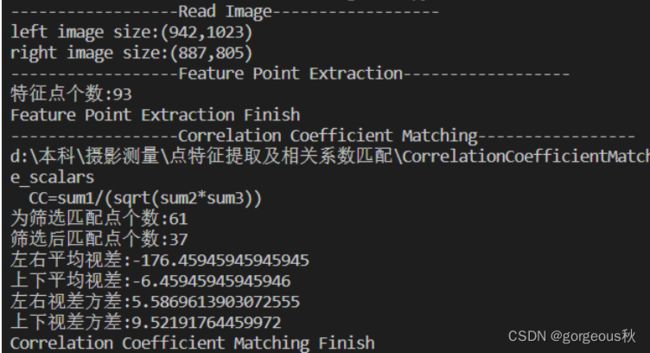
·相关系数阈值:0.85
由计算结果可知,左右视差约为-176.46px,上下视差约为-6.46px。