深度学习——学习笔记三
卷积神经网络
1.1计算机视觉
识别一张图片时,不一定只要识别出相应的物体,比如无人驾驶技术。在目标检测项目中,首先需要计算出图中有哪些物体,再将它们模拟成一个个盒子,或者用其他的技术,识别出他们在图片中的位置。
另一个例子,是神经网络实现的图片风格迁移。你有一张图片(左),你想将他转换成右边的风格:


你有一张满意的图片和一张风格的图片,你可以用神经网络将他们融合在一起:
最后生成的图片是左边的轮廓和右边的风格。
应用风格迁移时,需要注意的一点是数据的输入可能会非常大。之前64*64的图片,其实是64*64*3=12288的维度,如果你要操作1000*1000的图片,维度是3M,你也许会有1000个隐藏单元 ,而所有的权值,组成了矩阵W^[1],这个矩阵的大小,将会是3M*1000,这意味着矩阵w^[1]会有30亿个参数!
1.2边缘检测示例
卷积运算是卷积神经网络的重要组成部分,使用边缘检测作为入门样例。
前面提到深层需要做的是检测物体的一个部分,或检测整个物体。那么怎么检测一个边缘呢?
以这个图片为例,我们首先检测的是他的垂直边缘,人的身体和直栏便被检测出来;然后检测水平边缘,横槛就被检测到了。如何检测的呢?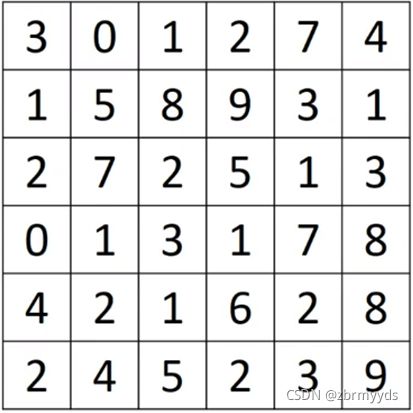
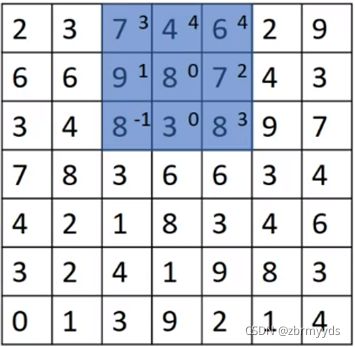
这是一个6*6的灰度图像,也就是6*6*1的矩阵A,为了检测边缘,我们可以创建一个3*3的过滤器filter,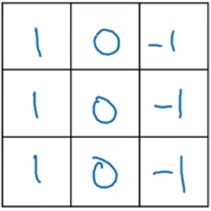
在论文中,有时会叫他kernel(核),对他们做卷积运算,用A*filter表示,*是卷积运算的标准符号,得到的结果是4*4*1的矩阵,可以看成是一个4*4的图像。将过滤器覆盖在矩阵的第一个3*3方阵,如图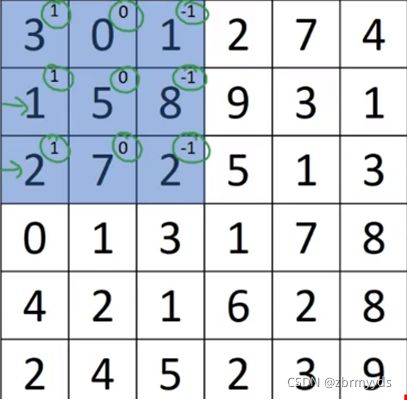
4*4矩阵的第一个结果是每个方格元素之积的和,即3*1+0*0+1*-1+1*1+5*0+8*-1+2*1+7*0+2*-1=-5。第二个元素就是从左到右第二个方阵,依次计算。如果要用代码编程计算实现,需要用到conv-forward函数。
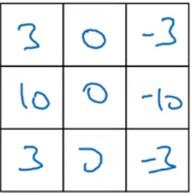
上边这个图像 ,要检测他的边缘,先将他的像素矩阵直观写出来。
,要检测他的边缘,先将他的像素矩阵直观写出来。
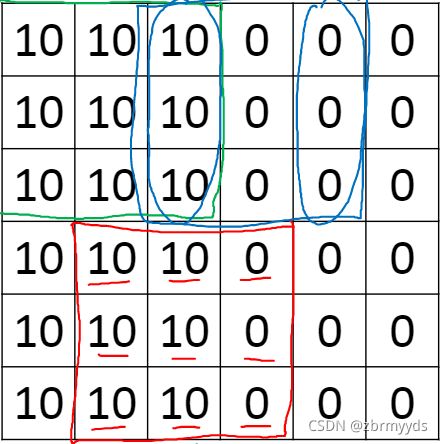
而一个过滤器是这样的: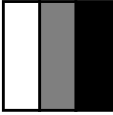

我们可以清晰地知道10和0之间是边缘,用这两个矩阵进行卷积运算,就得到了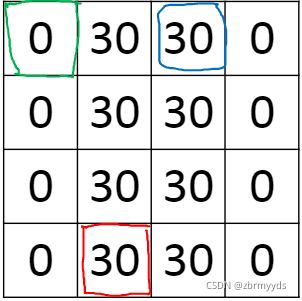
这样一个图像,将边缘位置用像素表示了出来。最终结果有点太粗了
但如果图片增大到1000*1000,最终结果会很好的展现出来。
1.3更多边缘检测内容
见过了垂直滤波器,水平滤波器一目了然。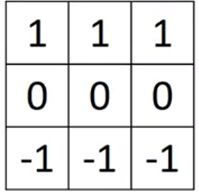
用它来检测如图矩阵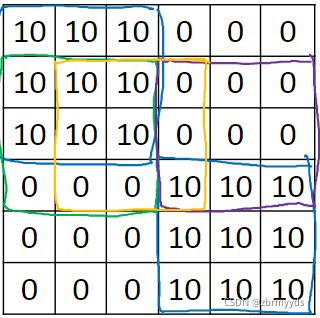
得到的结果为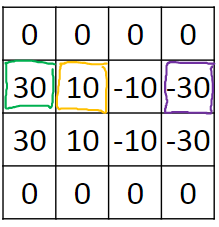
此外,还有许多滤波器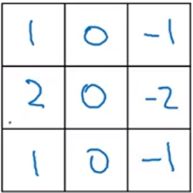
这是sobel滤波器,它的优势在于增加了中间一行的权重,使结果的rubust(稳定性)提高了 。
这是Scharr滤波器。但在处理图像的过程中,你不一定需要使用科学家们研究出来的方法,你可以把滤波器的9个元素当作9个参数,用反向传播方法去实现。这种参数矩阵能够检测出45度或者70度,甚至是任何角度的边缘。不过构成这些计算的基础,依然是卷积运算,使得神经网络能够学习任何他所需的3*3滤波器,并应用到整张图片中。
1.4padding
padding是一个基本的卷积操作。对于一个n*n的矩阵和一个f*f的过滤器,对他们进行卷积运算,得到的是(n-f+1)*(n-f+1)的矩阵,但有2个缺点,1个就是图像会越来越小,最后变得没有意义;第二个就是如果你注意角落边的像素,就会有许多3*3的区域与之重叠,所以在输出中采用较少,意味着你丢掉了图像边缘位置的许多信息。为了解决以上问题,你可以在卷积操作之前,填充这幅要处理的图像,你可以沿着图像边缘再填充一层像素,这样6*6的矩阵就可以变成8*8的矩阵,经过卷积,你就可以得到6*6的矩阵,大小没有发生变化。习惯上,我们会填充0,p是填充的数量,此时p=1,输出就变成了(n+2p-f+1)*(n+2p-f+1),此时的边缘或角落信息发挥作用也会变小,这一缺点也被削弱了。
至于选择填充多少像素,通常有两个选择,叫做Valid卷积和Same卷积。
Valid卷积:不填充像素,得到(n-f+1)*(n-f+1)。
Same卷积:填充p个像素,使得输入与输出矩阵维度相同,即(n+2p-f+1)=n
所以p=(f-1)/2,如果f是奇数,那么结果就是正常的输出,而习惯上通常f就是奇数,第一个是因为如果f是偶数,那么Same就无法做到自然填充;第二个,如果你是一个奇数维过滤器,他就有一个中心点,方便指出过滤器的位置。
1.5卷积步长

一个7*7的矩阵和一个3*3的过滤器,不同的是步幅改为了2,我们会让过滤器跳过2个步长,最终得到3*3的矩阵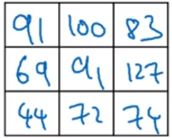
对于一个n*n矩阵和一个f*f过滤器,padding为p,步幅为s,最终得到
((n+2p-f)/s+1)*((n+2p-f)/s+1)的矩阵,如果结果不是整数,我们将括号里的数看作一个整体z,对z向下取整[z]。当然如果步幅过大,过滤器不能超过矩阵边缘,必须完全处于图像之中。
1.6卷积为何有效
假如不是灰度图像,而是RGB的彩色图像,假设他为6*6*3,高为6,宽为6,通道的数目为3。则过滤器也应有三层,他们的输出是一个4*4*1的图像。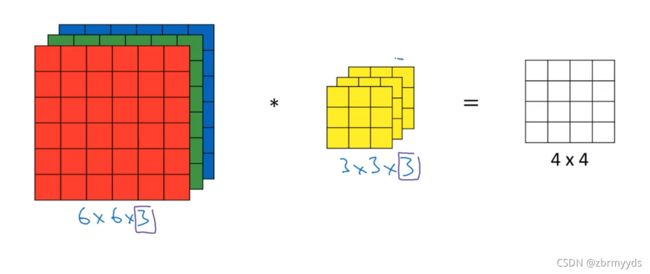
为了简化,将他们看作三维的长方体和立方体,将立方体放入长方体的第一个3*3*3的区域中,对这27组数分别的积求和,即为4*4矩阵的第一个结果。
如果你仅仅想求出红色通道的边缘,则只需过滤器与红色通道对应的通道为之前的过滤器,其他两层各个元素均为0。如果有多个过滤器:
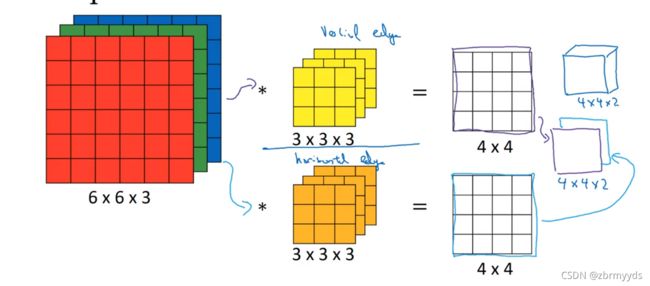
则将2次的输出结果堆叠成一个4*4*2的矩阵,看作一个小长方体 。
1.7单层卷积网络
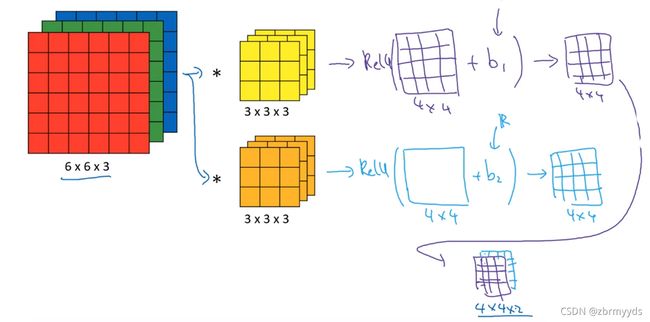
将之前得到的结果加上误差b1,b2,再加上非线性函数ReLU ,说明它是一个非线性激活函数。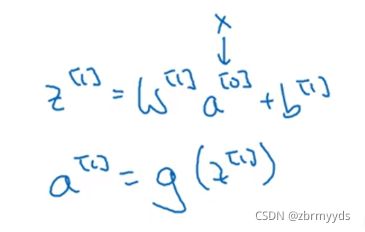
这是前向传播的一个操作,a[0]就是输入的图像,过滤器用变量w^[1]来表示,卷积的结果为w^[1]*a^[0],加上的误差就是b^[1] 。
无论输入的照片有多大,它的参数始终有过滤器的维度*数量决定,这就是卷积神经网络的一个特征,叫做“避免过拟合”。
现在用f^[l]=f,表示l层中过滤器的大小为f*f,p^[l]=padding,padding数量既可以指定为Valid卷积,也就是padding=0,也可以指定为Same卷积,使得输入输出图片高度和宽度相同。用s^[l]标记步幅。这一层的输入记为nH^[l-1]*nW^[l-1]*nC^[l-1],nC是通道的数量,l-1表示这是上一层的激活值。将上标改为l,就是这一层的输出值,用如图来表示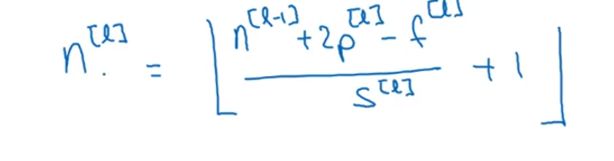
加上下标nH^[l]可以算出输出层的高度,同理可得宽度。
1.9池化层
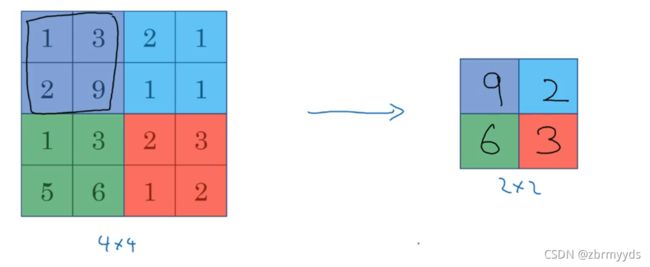
把左边矩阵分成四大块,每块取最大值得到右边的矩阵 。我们需对2*2的区域进行计算,好像应用了一个2*2的过滤器,步幅为2,这些就是最大池化的超级参数f=2,s=2。
最大化运算的实际作用是,如果在过滤器中提取到某个特征,那么保留其最大值,如果没有,则该特征不存在。人们使用最大池化的原因就是他在许多实验中效果都很好。
如果矩阵是三维的,那么输出结果也是三维。
还有另外一种池化方法——平均池化,就是把对应的区域取平均值。
1.11为什么使用卷积?
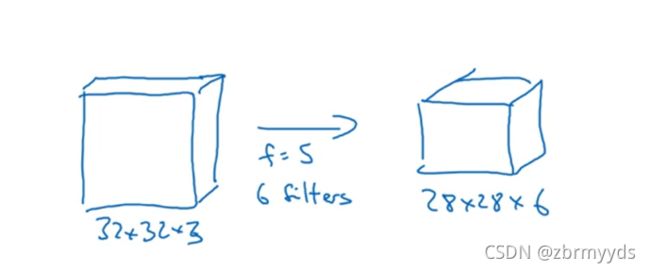
如图对图像卷积操作,原矩阵为32*32*3=3072,新矩阵为28*28*6=4704 。两层中的每个神经元彼此相连,然后计算权重矩阵,等于3072*4704~~14M,过滤器有6个,5阶,再加上偏差参数,为(5*5+1)*6=156个。
卷积网络映射参数这么少是有原因的:一种方法是参数共享,观察发现,特征检测如垂直边缘检测如果应用于图片的某一区域,那么它也可能适用于图片的其他区域,他不仅适用于低阶特征,同样适用于高阶,例如提取脸上的眼睛。即使减少参数,9个参数依然能计算出16个输出;第二种方法是使用稀疏连接,对于输出值,它只与3*3的输入特征有关联,其他像素值都不会使他的输出值变化,以便于我们用最小的训练集来训练他,从而预防过度拟合。
神经网络善于捕捉平移不变,因为即使移动几个像素,这张图片依然具有非常相似的特征。
最后,我们将这些层整合起来,看如何训练这些网络:

输入图片,添加卷积层和池化层,然后添加全连接层,最后输出softmax,即“y帽” ,成本函数:

所以训练神经网络,你要做的就是使用梯度下降法 ,或其他算法,例如含冲量的梯度下降,
含RMSProp或其他因子的梯度下降,来优化神经网络中的所有参数,以减少代价函数J的值。