毫米波雷达
毫米波雷达
在了解毫米波雷达之前,先知道什么是波?
日常中,用手机,无线对讲机,其实是“波通信”,无论是无线电波还是光波都属于“电磁波”。
电磁波是我们摸不着的东西,但同时它们一直陪伴在我们的生活。
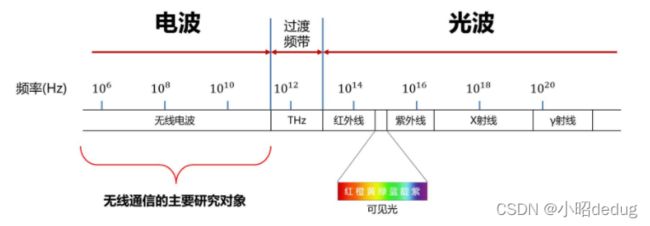
电磁波是以变化电场→变化磁场→变化磁场…交替发生产生进行传播的,所以电磁波是单位时间内完成周期变化的次数,是描述周期运动频繁程度的量。
电磁波在真空中的速度,等于光速3x10^8m/s 。
波长是指波在一个振动周期内传播的距离,波长 = 速率/频率。(波长和频率成反比关系)
根据电磁波的传播特性,在电磁波上搭载信息,用来通信。利用电磁波,就要占用频率资源。然而,这个频率资源并不是取之不尽、用之不竭的。可以用于民用移动通信的频率资源,只是所有电波频率资源中的一部分。
频谱,带宽,频段?
频率资源就像一条大马路,虽然很宽,但需要搭载的信息很多,我们通常说,频谱资源有限。
频谱,就是按电磁波波长(或频率)连续排列的电磁波族(频率是连续的,不是离散的,相近的频率之间容易干扰,而且某种用途都会占用一个频段,所以我们不是一个频率一个频率地分着用,而是一个范围一个范围地分着用)。
例如,频率在800Mhz-810Mhz区间的这个连续的电磁波族,就是一个频谱。
频段(band)代表了一个频率范围。为了避免不同个人或组织对频谱的滥用,造成冲突和干扰,频谱资源会被统一管理和分配。在我们国家,频谱由工信部进行管理和分配。
能使用的频率的宽度,也就是带宽(频宽),就类似于道路的宽度,因此带宽越大、运货速度越快,也就是数据传输速率越高。5G的带宽比4G的带宽宽得多,是4G传输速率的好几倍。
什么是毫米波?
毫米波 (mmWave) 是一类使用短波长电磁波的特殊雷达技术。毫米波指波长介于1~10mm的电磁波,毫米波雷达则指工作在毫米波波段的雷达。毫米波的波长介于厘米波和光波之间,因此毫米波兼有微波制导和光电制导的优点。使用在汽车上时其抗环境干扰能力强,可以满足车辆对全天气候的适应性的要求。毫米波雷达系统发射的电磁波信号被其发射路径上的物体阻挡继而会发生反射。经过捕捉反射的信号,雷达系统可以确定物体的距离、速度和角度,十分强大。
为什么毫米波会反射?红外光却会被黑色吸收?
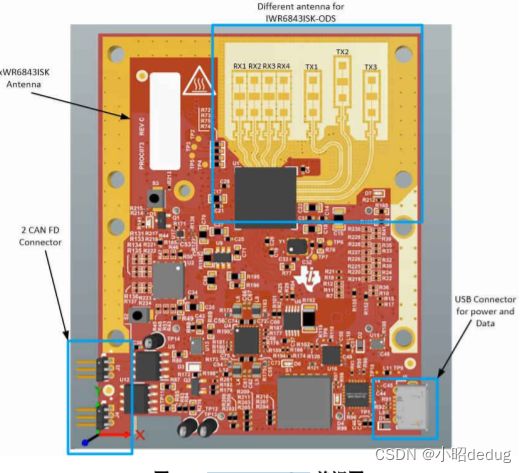
IT的60G毫米波雷达
由右上角金色部分,可以看出这是一款三发(TX1、TX2、TX3发射天线)四收(RX1、RX2、RX3、RX4接收天线)的毫米波雷达。

红外循迹模块
波遇到障碍物,一部分反射,一部分衍射,两种现象共同存在。在电磁波波长较长的情况下,它的衍射现象比较明显,如电视,广播信号的传递,能够“翻山越岭”。而波长比较短,也就是频率很高的电磁波的反射现象十分明显,因为波长很短,不易发生衍射,因此它遇到障碍物会更多地被反射回来,雷达就是这种原理,电磁波的波频越高,反射越明显,放射的强度还受介质的种类有关,金属就属于强反射物。
红外光在不同颜色的物体表面具有不同反射性质的特点,红外光遇到白色物体发射漫反射,反射光会被接收管接收;遇到黑色物体,红外光会被吸收。因为吸收所有光被定义成黑色,当一个物体吸收任何光,不反射任何光,你才会叫他黑色。
进入正题,毫米波是如何计算雷达与物体间的距离。
调频连续波 (FMCW) 雷达连续发射调频信号,以测量距离以及角度和速度。这与周期性发射短脉冲的传统脉冲雷达系统不同。FMCW雷达会发送一种信号叫"chrip",就是频率随时间线性增长的正弦波。
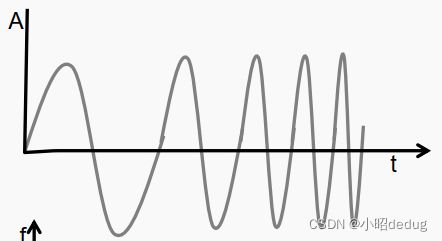
图1 线性调频脉冲信号(以振幅作为时间的函数)
由图2可知,一个chrip 以起始频率(fc)、带宽(B)和持续时间为特征(Tc)。一个chrip的斜率定义了chrip上升的速率。一个chrip在40us内扫过4GHz的带宽对应于100MHz/us的斜率.

图3,synth产生一个chrip,这个chrip由发射天线发射,chrip经过物体被放射,被接收天线接收到,mixe混频器将RX和TX信号合并到一起,生成一个中频信号(IF).

图3
图4,混频器是一种3端口设备,具有2个输入和1个输出。出于我们的目的,混合器可以建模如下。对于在两个输入端口处,输入的两个正弦波x1和x2,输出为具有瞬时频率等于两个输入正弦的瞬时频率之差。输出的相位等于两个输入正弦波的相位差


图4 三端混频器
IF信号
图5 显示了从物体反射的TX信号和RX信号。注意,RX信号只是TX信号的延迟信号。(τ表示雷达和目标之间的往返时间。S表示chrip的斜率,知道带宽和调制时间就可以求出)
混频器输出处的信号频率是TX chrip和RX chrip的瞬时频率之差。如下图所示,这是一条直线,一个频率恒定单音信号,频率为Sτ=S2d/c;[因为τ=2d/c,其中d是物体的距离,c是光速]

图5 物体静止时的情况
解算出IF信号的频率后,结合前面已知的参数,就可算出物体的距离。在雷达相对物体静止的情况,且只有一个物体时,理想状态下,IF信号频率是恒定的,这里需要利用到时域和频域的转换以及FFT快速傅里叶变换算法。对于存在相对速度,计算方位等情况,就需要涉及多普勒等相关算法。
毫米波雷达应用
汽车避障、医疗测心脉和安防智能检测等。相对于激光雷达,毫米波的优势,在雨天、雾霾等环境,毫米波雷达具有更强的穿透性,测距更远,成本低。但是激光雷达,角分辨率和距离分辨率高,实现的点云更加直观。
以上是工作总结,并非本专业。
如有问题,请联系小昭。