Chapter3 Pytorch神经网络工具箱
目录
- 1、神经网络核心组件
- 2、`nn`模块中的`Module`和`functional`
-
- 2.1、`nn.Module`
- 2.2、`nn.functional`
- 2.3、`Sequential()`使用介绍
- 2.4、使用`nn.Module`和`nn.functional`构建MLP模型
- 3、神经网络中的层、块和模型
-
- 3.1、自定义层
-
- 3.1.1、不带参数的层
- 3.1.2、带参数的层
- 3.2、自定义块
- 3.3、顺序块(Sequential类)
- 3.4、在正向传播中执行代码
- 4、神经网络中的参数管理
-
- 4.1、参数访问
- 4.2、参数初始化
-
- 4.2.1、内置初始化
- 4.2.2、自定义初始化
- 4.3、参数绑定
- 5、优化器以及优化器的比较
-
- 5.1、优化器使用步骤
- 5.2、修改学习率参数
- 5.3、优化器比较
- 6、如何构建一个神经网络
- 7、保存和加载模型
-
- 7.1、加载和保存张量
- 7.2、加载和保存模型参数(官方推荐)
- 7.3、加载和保存整个模型(模型+参数)
- 8、GPU
-
- 8.1、计算设备
- 8.2、张量与GPU
- 8.3、神经网络与GPU
利用Pytorch神经网络工具箱,设计一个神经网网络就像搭积木一样,可以极大的简化我们构建模型的任务。在此介绍如何使用Pytorch神经网络工具箱来构建网络,主要有以下内容:
- 神经网络核心组件
nn模块中的Module和functional- 神经网络中的层、块和模型
- 神经网络中的参数管理
- 优化器以及优化器的比较
- 如何构建一个神经网络
- 保存和加载模型
- GPU
1、神经网络核心组件
神经网络看起来很复杂,节点很多,层数多,参数更多。但核心部分或组件不多,把这些组件确定之后,这个神经网络就基本确定了,这些核心组件包括:
- 层:神经网络的基本结构,将输入张量转换为输出张量
- 模型:层构成的网络
- 损失函数:参数学习的目标函数,通过最小化损失函数来学习各种参数。
- 优化器:如何使损失函数最小,设计优化器。
这些组件之间不是独立的,他们之间,以及它们与神经网络其他组件之间有密切关系。这些关键组件及相互关系,如下图所示。
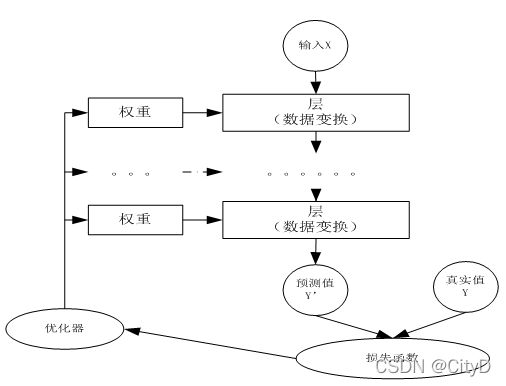
多个层链接在一起构成一个模型或网络,输入数据通过这个模型转换为预测值,然后损失函数把预测值与真实值进行比较,得到损失值,该损失函数值用于衡量预测值与目标结果的匹配或相似程度,优化器利用损失值更新权重参数,从而使损失值越来越小。这是一个循环过程,当损失值达到一个阈值或循环次数到达指定次数,循环结束。
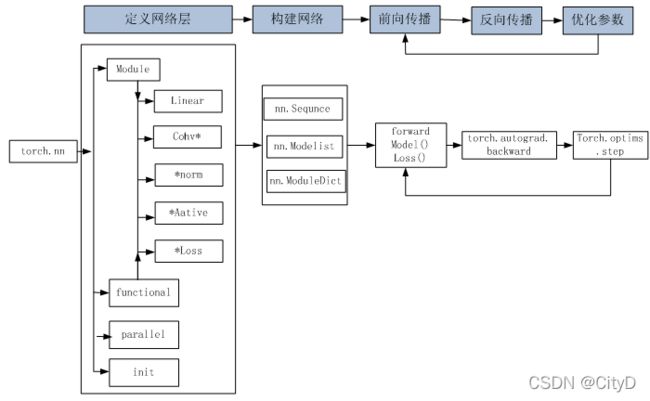
使用Pytorch构建神经网络使用的主要工具(或类)及相互关系,如下图所示。
2、nn模块中的Module和functional
nn模块中有两个重要模块:nn.Model、nn.functional。构建网络层可以基于Module类或函数(nn.functional)。nn.functional中函数与nn.Module中的Layer的主要区别是后者继承Module类,会自动提取可学习的参数。而nn.functional更像是纯函数。两者功能相同,且性能也没有很大的区别,那么应该如何选择?像卷积层、全连接层、Dropout层等因含有可学习参数,一般使用nn.Module;而激活函数、池化层不含可学习参数,可以使用nn.functional中对应的函数。
2.1、nn.Module
nn.Module是nn的一个核心数据结构,它可以是神经网络的某个层(Layer),也可以是包含多层的神经网络。在实际使用中,最常见的做法是继承nn.Module,生成自己的网络/层。nn中已实现了绝大多数层,包括全连接层、损失层、激活层、卷积层、循环层等,这些层都是nn.Module的子类,能够自动检测到自己的Parameter,并将其作为学习参数,且针对GPU进行了cuDNN优化。
2.2、nn.functional
nn中的层,一类是继承了nn.Module,其命名一般为nn.Xxx(第一个为大写),如nn.Linear、nn.Conv2d、nn.CrossEntropyLoss等。另一类是nn.functional中的函数,其名称一般为nn.functional.xxx,如nn.functional.linear、nn.functional.conv2d、nn.functional.cross_entropy等。从功能来说两者相当,且性能没有太大差异。在具体使用时,两者还是有区别,主要区别如下:
nn.Xxx继承于nn.Module,nn.Xxx需要先实例化并传入参数,然后以函数调用的方式调用实例化的对象并传入输入数据。它能够很好地与nn.Sequential结合使用,而nn.functional.xxx无法与nn.Sequential结合使用。nn.Xxx不需要自己定义和管理weight、bias参数;而nn.functional.xxx需要自己定义weight、bias参数,每次调用的时候都需要手动传入weight、bias等参数,不利于代码复用。Dropout操作在训练和测试阶段是有区别的,使用nn.Xxx方式定义Dropout,在调用model.eval()之后,自动实现状态的转换,而使用nn.functional.xxx没有该功能。
Pytorch官方推荐:具有学习参数的(例如,conv2d,linear,batch_norm)采用nn.Xxx方式。没有学习参数的(例如,maxpool、loss func、activation func)等根据个人选择使用nn.functional.xxx或nn.Xxx的方式。
2.3、Sequential()使用介绍
Sequential()函数的功能是将网络的层组合到一起,功能与Keras的models.Sequential()类似,构建网络就像搭积木一样,十分的方便。下面使用Sequential()函数构建一个多层的多层感知机网络,有关Sequential()函数是如何实现的可看3.3节。
import torch
from torch import nn
net=nn.Sequential(nn.Linear(4,8),nn.ReLU(),
nn.Linear(8,8),nn.ReLU(),
nn.Linear(8,1))
X=torch.rand(2,4)
net(X),net
(tensor([[-0.3123],
[-0.3337]], grad_fn=),
Sequential(
(0): Linear(in_features=4, out_features=8, bias=True)
(1): ReLU()
(2): Linear(in_features=8, out_features=8, bias=True)
(3): ReLU()
(4): Linear(in_features=8, out_features=1, bias=True)
))
如果要对每个层定义一个名称,可以采用Sequential的一种改进方法,在Sequential的基础上,通过add_module()添加每一层,并且为每一层添加一个单独的名字。
net=nn.Sequential()
net.add_module('linear1',nn.Linear(4,8))
net.add_module('activate1',nn.ReLU())
net.add_module('linear2',nn.Linear(8,8))
net.add_module('activate2',nn.ReLU())
net.add_module('linear3',nn.Linear(8,1))
X=torch.rand(2,4)
net(X),net
(tensor([[-0.1616],
[-0.1190]], grad_fn=),
Sequential(
(linear1): Linear(in_features=4, out_features=8, bias=True)
(activate1): ReLU()
(linear2): Linear(in_features=8, out_features=8, bias=True)
(activate2): ReLU()
(linear3): Linear(in_features=8, out_features=1, bias=True)
))
另一种方法实在Sequential的基础上,通过字典的形式添加每一层,并且设置单独的层名称,以下是采用字典方式构建网络的一个示例代码:
#子类OrderedDict,实现了对字典对象中元素的排序
#使用OrderedDict会根据放入元素的先后顺序进行排序
from collections import OrderedDict
class Net(nn.Module):
def __init__(self):
super(Net,self).__init__()
self.block=nn.Sequential(
OrderedDict([
("dense1",nn.Linear(4,8)),
("relu1",nn.ReLU()),
("dense2",nn.Linear(8,8)),
("relu2",nn.ReLU()),
("dense3",nn.Linear(8,1))
])
)
def forward(self,X):
return self.block(X)
net=Net()
X=torch.rand(2,4)
net(X),net
(tensor([[0.1490],
[0.1656]], grad_fn=),
Net(
(block): Sequential(
(dense1): Linear(in_features=4, out_features=8, bias=True)
(relu1): ReLU()
(dense2): Linear(in_features=8, out_features=8, bias=True)
(relu2): ReLU()
(dense3): Linear(in_features=8, out_features=1, bias=True)
)
))
2.4、使用nn.Module和nn.functional构建MLP模型
import torch
from torch import nn
import torch.nn.functional as F
class Net(nn.Module):
def __init__(self,in_dim,n_hidden_1, n_hidden_2,out_dim):
super(Net,self).__init__()
#Sequential()函数的功能是将网络的层组合到一起
#线性层和batchNorm使用nn.Module
self.layer1=nn.Sequential(nn.Linear(in_dim,n_hidden_1),nn.BatchNorm1d(n_hidden_1))
self.layer2=nn.Sequential(nn.Linear(n_hidden_1,n_hidden_2),nn.BatchNorm1d(n_hidden_2))
self.layer3=nn.Sequential(nn.Linear(n_hidden_2,out_dim))
def forward(self,x):
#激活函数使用nn.functional
x=F.relu(self.layer1(x))
x=F.relu(self.layer2(x))
x=self.layer3(x)
return x
#实例化网络,参数为个层的节点数
net=Net(2,3,3,1)
print(net)
Net(
(layer1): Sequential(
(0): Linear(in_features=2, out_features=3, bias=True)
(1): BatchNorm1d(3, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
(layer2): Sequential(
(0): Linear(in_features=3, out_features=3, bias=True)
(1): BatchNorm1d(3, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
(layer3): Sequential(
(0): Linear(in_features=3, out_features=1, bias=True)
)
)
3、神经网络中的层、块和模型
对于单一输出的线性模型只有一个神经元组成。单个神经元(1)接受一些输入;(2)生成相应的标量输出;(3)具有一组相关参数,这些参数可以以优化某些感兴趣的目标函数。对于多个输出的网络也可以由上述进行描述。在使用线性模型的时候,一个单层本身就是模型。
而对于多层感知机而言,整个模型及其组成层都是这种结构。整个模型接受原始输入(特征),生成输出(预测),并包含一些参数(所有组成层的参数集合)。同样每个单独的层接受输入(由前一层提供)生成输出(到下一层),并且具有一组可调参数,这些参数根据从下一层反向传播的信号进行更新。
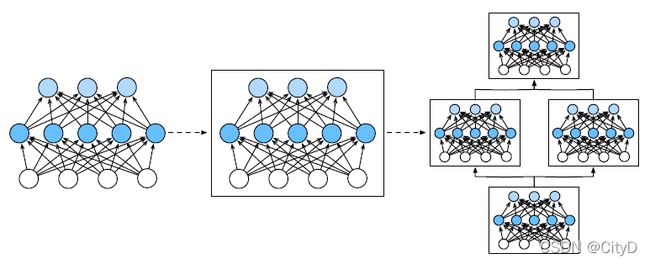
虽然神经元、层和模型为我们的业务提供了足够的抽象,但讨论“比单个层⼤”但“比整个模型小”的组件更有价值。计算机视觉中流行的ResNet-152架构有数百层,这些层是由层组的重复模式组成。层组以各种重复模式排列的类似架构在现在是普遍存在的。为了实现这些复杂的网络,我们引入了神经网络块的概念。块可以描述单个层、由多个层组成的组件或者整个模型本身。通过定义代码来按需生成任意复杂度的块,可以通过简洁的代码实现复杂的神经网络。
从编程的角度看,块由类表示,它的任何子类都必须定义一个将其输入转换为输出的前向传播函数,并且必须存储任何必须必的参数。由于自动微分实现了反向传播,因此我们只需要考虑前向传播和必须的参数。
下面是一个多层感知机的代码。代码构成一个网络,其中包含一个具有256个单元的ReLU激活函数的全连接层的隐藏层,然后是一个具有10个隐藏单元且不带激活层的全连接层的输出层。
import torch
from torch import nn
from torch.nn import functional as F
#构建网络
net = nn.Sequential(nn.Linear(20,256),nn.ReLU(),nn.Linear(256,10))
#输出张量
X=torch.randn(2,20)
#输出
net(X)
tensor([[-0.1556, 0.1318, -0.3911, 0.0676, 0.1655, 0.0950, -0.2956, 0.0608,
0.6323, -0.1332],
[ 0.1199, 0.2001, -0.2833, 0.2620, -0.0786, -0.1871, 0.0011, 0.3654,
0.1516, -0.1067]], grad_fn=)
在本例中,通过实例化nn.Sequential来构建模型。nn.Sequential定义了一种特殊的Module。
3.1、自定义层
深度学习可以用创造性的方式组合广泛的层,从而设计出适用于各种任务的结构,因此需要自己去构建深度学习框架中还不存在的层。
3.1.1、不带参数的层
首先构建一个没有任何参数的层,下面的CenterLayer类实现从其输入中减去均值。需要继承基础层类并实现正向传播功能。
import torch
import torch.nn.functional as F
from torch import nn
class CenteredLayer(nn.Module):
def __init__(srlf):
super().__init__()
def forward(self,X):
return X-X.mean()
提供一些数据验证该层是否可以按预期工作。
#定义对象
layer=CenteredLayer()
#将输入传入层,获得输出
layer(torch.FloatTensor([1,2,3,4,5]))
tensor([-2., -1., 0., 1., 2.])
可以将层作为组件合并到更复杂的模型中。
net=nn.Sequential(nn.Linear(8,128),CenteredLayer())
传入数据,检查是否可以运行。
Y=net(torch.rand(4,8))
Y.mean()
tensor(5.5879e-09, grad_fn=)
3.1.2、带参数的层
继续定义一个有参数的层,,这些参数可以通过训练进行调整。我们可以使用内置函数来创建参数,这些函数提供⼀些基本的管理功能。比如管理访问、初始化、共享、保存和加载模型参数。这样做的好处之⼀是:我们不需要为每个自定义层编写自定义的序列化程序。
实现一个自定义版本的全连接层。该层需要权重和偏置两个参数。使用ReLU作为激活函数。该层需要两个输入in_units和units,分别表示输入和输出的数量。
class MyLinear(nn.Module):
def __init__(self,in_units,units):
super().__init__()
#Parameter:首先可以把这个函数理解为类型转换函数,
#将一个不可训练的类型Tensor转换成可以训练的类型parameter
#并将这个parameter绑定到这个module里面
self.weight=nn.Parameter(torch.randn(in_units,units))
self.bias=nn.Parameter(torch.randn(units,))
def forward(self,X):
#matmul:张量相乘
linear=torch.matmul(X,self.weight.data)+self.bias.data
return F.relu(linear)
实例化MyLinear类并访问其模型参数。
linear=MyLinear(5,3)
linear.weight
Parameter containing:
tensor([[ 1.1091, 1.4573, -0.8924],
[ 0.0896, -1.4303, -0.0430],
[-0.9766, 0.1827, 0.4117],
[-1.1084, 0.5383, 0.1812],
[ 0.4216, -0.0934, 0.1748]], requires_grad=True)
使用自定义的层直接执行正向传播计算。
linear(torch.rand(2,5))
tensor([[0.0000, 0.2072, 0.8235],
[0.0000, 0.0000, 1.6173]])
还可以使用自定义层构建模型。可以像使用内置的全连接成一样使用自定义层。
net=nn.Sequential(MyLinear(64,8),MyLinear(8,1))
net(torch.rand(2,64))
tensor([[0.],
[0.]])
3.2、自定义块
要想直观了解块是如何工作的,最简单的方法就是自己实现一个。每个块必须提供的基本功能如下。
- 将输入数据作为其正向传播函数的参数。
- 通过正向传播函数生成输出。
- 计算其输出关于输入的梯度,可以通过反向传播函数实现,通常是自动进行的。
- 存储和访问正向传播计算所需的参数。
- 根据需要初始化模型参数。
从零开始编写一个块。它包含一个多层感知机,其具有256个隐藏单元的隐藏层和一个10维输出层。下面的MLP类继承了表示块的类(nn.Module)。因此只需要提供自己的构造函数(Python中的__init__函数)和前向传播函数。
import torch
from torch import nn
from torch.nn import functional as F
class MLP(nn.Module):
#定义模型的层,声明两个全连接的层
def __init__(self):
#初始化父类
super().__init__()
self.hidden=nn.Linear(20,256)#隐藏层
self.out=nn.Linear(256,10)#输出层
#定义正向传播,可以根据输出X返回模型的输出
def forward(self,X):
#使用ReLU激活函数
return self.out(F.relu(self.hidden(X)))
我们定制的__init__函数通过super().__init__() 调用父类的__init__函数,省去了重复编写模版代码的痛苦。然后,我们实例化两个全连接层,分别为self.hidden和self.out。注意,除⾮我们实现⼀个新的运算符,否则不必担心反向传播函数或参数初始化,系统将自动生成这些。
X=torch.rand(2,20)
net=MLP()
net(X)
tensor([[-0.1003, 0.1205, 0.1990, 0.0434, 0.2265, 0.2731, -0.2046, -0.0733,
0.1833, 0.3483],
[-0.2320, 0.1059, 0.2352, -0.1212, 0.2700, 0.1981, -0.1899, -0.1203,
0.0759, 0.3010]], grad_fn=)
抽象块的一个优点是它的多功能性。可以子类化块以创建层、整个模型或具有中等复杂度的各种组件。
3.3、顺序块(Sequential类)
为了更清楚的了解Sequential类是如何工作的,下面构建自己简化的MySequential,只需要定义两个关键函数:1.一种将块逐个追加到列表的函数。2.一种正向传播函数,用于将输入按追加块的顺序传递给块组成的“链条”。
import torch
from torch import nn
from torch.nn import functional as F
class MySequential(nn.Module):
def __init__(self,*args):
super().__init__()
for block in args:
#这里 block是Module子类的一个实例。将其保存在Module类的成员变量_modules中。block的类型是OrderedDict
self._modules[block]=block
def forward(self,X):
#OrderedDict保证了按照成员添加的顺序遍历他们
for block in self._modules.values():
X=block(X)
return X
每个Module都有一个_modules属性。使用它而不使用自己定义的python的列表是因为_modules在块的初始化过程中,系统知道在_modules字典中查找需要初始化参数的子块。
当MySequential的正向传播函数被调用时,每个添加的块都按照他们被添加的顺序执行。
net=MySequential(nn.Linear(20,256),nn.ReLU(),nn.Linear(256,10))
X=torch.rand(2,20)
net(X)
tensor([[ 0.0995, 0.0281, -0.0389, 0.0936, 0.0438, 0.2560, 0.2108, -0.1924,
0.0846, -0.1313],
[ 0.0511, 0.0070, -0.0647, 0.0691, 0.0067, 0.3497, 0.2170, -0.1781,
-0.0008, -0.2260]], grad_fn=)
3.4、在正向传播中执行代码
并不是所有的架构都是简单的顺序结构。当需要更大的灵活性时,我们需要自定义块。例如,在正向传播函数中执行python的控制流。此外可能希望执行任意的数学运算,而不是简单的依赖预定义的神经网络层。下面实现了FixedHiddenMLP类。
import torch
from torch import nn
from torch.nn import functional as F
class FixedHiddenMLP(nn.Module):
def __init__(self):
super().__init__()
#不计算梯度的随机权重参数,在训练期间保持不变
self.rand_weight=torch.rand((20,20),requires_grad=False)
self.linear=nn.Linear(20,20)
def forward(self,X):
X=self.linear(X)
#使用创建的常量参数以及relu和dot函数
X=F.relu(torch.mm(X,self.rand_weight)+1)
#复用全连接层,两个全连接成共享参数
X=self.linear(X)
#控制流
while X.abs().sum()>1:
X/=2
return X.sum()
没有标准的神经网络可以执行上述操作。下面查看是否可以实现该网络。
net=FixedHiddenMLP()
X=torch.rand(2,20)
net(X)
tensor(0.1608, grad_fn=)
还可以混合搭配各种组合块的方法。下面的例子中,实现方法嵌套块。
class NestMLP(nn.Module):
def __init__(self):
super().__init__()
self.net=nn.Sequential(nn.Linear(20,64),nn.ReLU(),nn.Linear(64,32),nn.ReLU())
self.linear=nn.Linear(32,16)
def forward(self,X):
return self.linear(self.net(X))
chimera=nn.Sequential(NestMLP(),nn.Linear(16,20),FixedHiddenMLP())
X=torch.rand(2,20)
chimera(X)
tensor(-0.1679, grad_fn=)
4、神经网络中的参数管理
有时,我们希望提取参数,以便在其他环境中复用他们,将模型保存到磁盘,以便它可以再其他软件中执行,或者为了获得科学的理解而进行检查。因此介绍以下内容:
- 访问参数,用于调试、诊断和可视化
- 参数初始化
- 在不同的模型组件中共享参数
首先定义一个具有单隐藏层的多层感知机。
import torch
from torch import nn
net=nn.Sequential(nn.Linear(4,8),nn.ReLU(),nn.Linear(8,1))
X=torch.rand(size=(2,4))
net(X)
tensor([[0.4796],
[0.5347]], grad_fn=)
4.1、参数访问
从已有的模型中访问参数。当通过Sequential类定义模型时,可以通过索引来访问模型的任意层。模型就像一个列表。每层的参数都在其属性中。如下所示,可以检查第二个全连接层的参数。
print(net[2].state_dict())
OrderedDict([('weight', tensor([[ 0.2000, 0.3015, 0.2418, -0.0520, -0.0950, 0.1996, 0.1854, -0.0726]])), ('bias', tensor([0.3100]))])
这个全连接层包含两个参数,分别是该层的权重和偏置。
目标参数
下面的代码从第二个神经网络层提取偏置,提取后返回的是一个参数类实例,并进一步访问该参数。
print(type(net[2].bias))
print(net[2].bias)
print(net[2].bias.data)
Parameter containing:
tensor([0.3100], requires_grad=True)
tensor([0.3100])
参数是复合对象,包含值、梯度和额外信息。
除了值之外,还可以访问每个参数的梯度。由于还没有调用网络的反向传播,所以参数的梯度处于初始状态。
print(net[2].weight.grad)
None
一次性访问所有参数
使用递归整个树来提取每个子块的参数。
#获取第0层的参数
print(*[(name,param.shape) for name,param in net[0].named_parameters()])
#获取第所有层的参数,因为第二层是relu层,因此没有参数
print(*[(name,param.shape) for name,param in net.named_parameters()])
('weight', torch.Size([8, 4])) ('bias', torch.Size([8]))
('0.weight', torch.Size([8, 4])) ('0.bias', torch.Size([8])) ('2.weight', torch.Size([1, 8])) ('2.bias', torch.Size([1]))
还有另一种访问网络参数的方式
net.state_dict()['2.bias'].data
tensor([0.3100])
从嵌套块收集参数
让多个块相互嵌套,参数命名约定是如何工作的。为此定义一个生成块,然后将这些组合到更大的块中。
def block1():
return nn.Sequential(nn.Linear(4,8),nn.ReLU(),
nn.Linear(8,4),nn.ReLU())
def block2():
net=nn.Sequential()
for i in range(4):
#嵌套,并给块命名
net.add_module(f'block{i}',block1())
return net
rgnet = nn.Sequential(block2(),nn.Linear(4,1))
X=torch.rand(size=(2,4))
rgnet(X)
tensor([[0.2028],
[0.2029]], grad_fn=)
查看网络是如何组织的
print(rgnet)
Sequential(
(0): Sequential(
(block0): Sequential(
(0): Linear(in_features=4, out_features=8, bias=True)
(1): ReLU()
(2): Linear(in_features=8, out_features=4, bias=True)
(3): ReLU()
)
(block1): Sequential(
(0): Linear(in_features=4, out_features=8, bias=True)
(1): ReLU()
(2): Linear(in_features=8, out_features=4, bias=True)
(3): ReLU()
)
(block2): Sequential(
(0): Linear(in_features=4, out_features=8, bias=True)
(1): ReLU()
(2): Linear(in_features=8, out_features=4, bias=True)
(3): ReLU()
)
(block3): Sequential(
(0): Linear(in_features=4, out_features=8, bias=True)
(1): ReLU()
(2): Linear(in_features=8, out_features=4, bias=True)
(3): ReLU()
)
)
(1): Linear(in_features=4, out_features=1, bias=True)
)
因为层是分层嵌套的,可以像通过嵌套列表索引一样访问他们。例如访问第一个主要的块,其中第二个子块的第一层的偏置项。
rgnet[0][1][0].bias.data
tensor([-0.1297, -0.2927, 0.2727, -0.4982, 0.2166, 0.3460, -0.0646, 0.4258])
4.2、参数初始化
深度学习框架提供默认随机初始化。然而,我们希望可以根据其他规则初始化权重。深度学习框架提供了最常用的规则,也允许自定义初始化方法。
默认情况下,Pytorch会根据一个范围均匀地初始化权重和偏置矩阵,这个范围是根据输入和输出维度计算出的。Pytorch的nn.init模块提供了多种预置的初始化方法。
4.2.1、内置初始化
首先使用内置的初始化器。下面的代码将所有权重参数初始化为标准差为0.01的高斯随机变量,且将偏置参数设置为0。
def init_normal(m):
if type(m)==nn.Linear:
nn.init.normal_(m.weight,mean=0,std=0.01)
nn.init.zeros_(m.bias)
#网络为上一节定义
net.apply(init_normal)
net[0].weight.data[0],net[0].bias.data[0]
(tensor([-4.3025e-03, 2.7619e-03, -8.0229e-03, -5.2681e-05]), tensor(0.))
还可以将所有参数初始化为给定的常数
def init_constant(m):
if type(m)==nn.Linear:
nn.init.constant_(m.weight,1)
nn.init.zeros_(m.bias)
net.apply(init_constant)
net[0].weight.data[0],net[0].bias.data[0]
(tensor([1., 1., 1., 1.]), tensor(0.))
4.2.2、自定义初始化
下面例子中,使用以下的分布为任意权重参数 w w w定义初始化方法:
w ∼ { U ( 5 , 10 ) , with probability 1/4 0 , with probability 1/2 U ( − 10 , − 5 ) , with probability 1/4 w \sim \begin{cases} U(5,10),& \text{with probability \: 1/4 } \\ 0, & \text{with probability \: 1/2}\\ U(-10,-5),& \text{with probability \: 1/4} \end{cases} w∼⎩⎪⎨⎪⎧U(5,10),0,U(−10,−5),with probability 1/4 with probability 1/2with probability 1/4
def my_init(m):
if type(m)==nn.Linear:
print("Init",*[(name,param.shape) for name,param in m.named_parameters()][0])
nn.init.uniform_(m.weight,-10,10)
m.weight.data*=m.weight.data.abs()>=5
net.apply(my_init)
net[0].weight[:2]
Init weight torch.Size([8, 4])
Init weight torch.Size([1, 8])
tensor([[ 0.0000, 0.0000, 5.1294, -8.5471],
[-8.3953, 7.2347, -7.2256, -0.0000]], grad_fn=)
4.3、参数绑定
有时我们希望在多个层之间共享参数,下面定义一个稠密层,然后使用它的参数来设置另一个层的参数。其实就是使用同一个层。
#我们需要给共享层一个参数,以便可以引用它的参数。
shared=nn.Linear(8,8)
net=nn.Sequential(nn.Linear(4,8),nn.ReLU(),
shared,nn.ReLU(),
shared,nn.ReLU(),
nn.Linear(8,1))
X=torch.rand(size=(2,4))
net(X)
#检查参数是否相同
print(net[2].weight.data[0]==net[4].weight.data[0])
net[2].weight.data[0,0]=100
print(net[2].weight.data[0]==net[4].weight.data[0])
tensor([True, True, True, True, True, True, True, True])
tensor([True, True, True, True, True, True, True, True])
5、优化器以及优化器的比较
Pytorch常用的优化器都封装在torch.optim里面,设计灵活,可以扩展为自定义的优化方法。所有的优化方法都继承了基类optim.Optimizer,并实现了自己的优化步骤。最常用的优化算法就是梯度下降法及其各种变种。
5.1、优化器使用步骤
- 建立优化器实例
导入optim模块,实例化优化器,根据需要选择合适的优化器,这里以动量版的SGD为例
import torch.optim as optim
#model.parameters()为模型的参数,lr为学习率,monentum为动量
optimizer=optim.SGD(model.parameters(),lr=lr,monentum=momentum)
- 前向传播
把输入数据传入神经网络Net实例化对象model中,自动执行forward函数,得到out输出值,然后用out与标记label计算损失值loss。
out=model(img)
loss=criterion(out,label)
- 清空梯度
缺省情况下梯度是累加的,在梯度反向传播前,先需把梯度清零。
optimizer.zero_grad()
- 反向传播
基于损失值,把梯度进行反向传播
loss.backward()
- 更新参数
基于当前梯度(存储在参数的.grad属性中)更新参数。
optimizer.step()
5.2、修改学习率参数
修改优化器中参数的方式可以修改参数optimizer.params_groups。
optimizer.params_groups:长度为1的list;optimizer.params_groups[0]:长度为6的字典,包括权重参数、lr、momentum等参数。
len(optimizer.param_groups[0]) #结果为6
可以通过修改optimizer.param_groups[0]['lr']的值修改学习率。
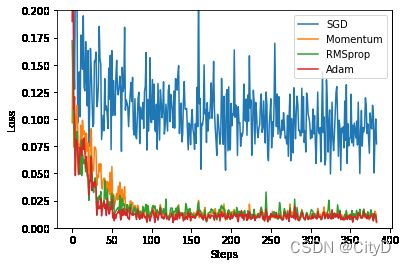
5.3、优化器比较
Pytorch中优化器很多,各种优化器都有其适应的场景,不过自适应优化器在深度学习中比较受欢迎,有性能好、鲁棒性、泛化能力强的优点。下面使用多种优化器实现网络。有SGD、SGD的动量版、RMSProp、Adam。
- 导入所需要的模块。
import torch
import torch.utils.data as data
import torch.nn.functional as F
import matplotlib.pyplot as plt
%matplotlib inline
#超参数
#学习率
LR=0.01
#批量大小
BATCH_SIZE=32
#训练轮次
EPOCH=12
- 生成数据
#生成数据的函数
def synthetic_data(num_example):
#生成-1到1区间内的num_example个数据
x=torch.linspace(-1,1,num_example)
#将一维变二维,torch智能处理二维的数据
x=torch.unsqueeze(x,dim=1)
#生成y,并添加噪声
y=x.pow(2)+0.1*torch.normal(torch.zeros(*x.size()))
return x,y
x,y=synthetic_data(1000)
#构造一个Pytorch数据迭代器
def load_array(data_arrays,batch_size,is_train=True):
#加星号说明为元组
#TensorDataset 可以用来对 tensor 进行打包
dataset=data.TensorDataset(*data_arrays)
return data.DataLoader(dataset,batch_size,shuffle=is_train)
loader=load_array((x,y),BATCH_SIZE)
- 构建神经网络
class Net(torch.nn.Module):
def __init__(self):
super(Net,self).__init__()
self.hidden=torch.nn.Linear(1,20)
self.predict=torch.nn.Linear(20,1)
def forward(self,x):
x=F.relu(self.hidden(x))
x=self.predict(x)
return x
- 使用多种优化器
#SGD
net_SGD=Net()
#Momentum
net_Momentum=Net()
#RMSProp
net_RMSProp=Net()
#Adam
net_Adam=Net()
nets=[net_SGD,net_Momentum,net_RMSProp,net_Adam]
#设置优化器
opt_SGD=torch.optim.SGD(net_SGD.parameters(),lr=LR)
opt_Momentum=torch.optim.SGD(net_Momentum.parameters(),lr=LR,momentum=0.9)
opt_RMSProp=torch.optim.RMSprop(net_RMSProp.parameters(),lr=LR,alpha=0.9)
opt_Adam=torch.optim.Adam(net_Adam.parameters(),lr=LR,betas=(0.9,0.99))
optimizers=[opt_SGD,opt_Momentum,opt_RMSProp,opt_Adam]
- 训练模型
#设置损失函数
loss_func=torch.nn.MSELoss()
#记录损失
loss_his=[[],[],[],[]]
#训练模型
for epoch in range(EPOCH):
#每次去BATCH_SIZE条数据,直到对所有数据取完
for step,(batch_x,batch_y) in enumerate(loader):
#对使用不同的优化器的网络进行训练
#zip用于将可迭代对象作为参数,将对象中对应的元素打包成一个个元组,然后返回由这些元组组成的对象。
for net,opt,l_his in zip(nets,optimizers,loss_his):
#得到预测值
output=net(batch_x)
#计算损失
loss=loss_func(output,batch_y)
#清空梯度
opt.zero_grad()
#反向传播
loss.backward()
#更新参数
opt.step()
#记录损失
l_his.append(loss.data.numpy())
labels=['SGD','Momentum','RMSprop','Adam']
- 可视化结果
for i,l_his in enumerate(loss_his):
plt.plot(l_his,label=labels[i])
plt.legend(loc='best')
plt.xlabel('Steps')
plt.ylabel('Loss')
plt.ylim((0,0.2))
plt.show()
6、如何构建一个神经网络
构建神经网络的步骤:
- 构建网络层,使用
nn.Sequential、nn.Module、nn.funcational根据实际情况搭建模型 - 前向传播,主要定义
froward函数。主要任务是将输入层,网络层,输出层连接起来,实现信息的前向传播。 - 反向传播,Pytorch提供了自动反向传播的功能,使用nn工具箱,无语自己编写反向传播,直接让损失函数
loss调用backwrd()即可。在反向传播中,优化器是一个重要角色,需要根据实际情况选择合适的优化器。 - 模型训练,模型训练时,要注意使模型处于训练模式,即调用
model.train()。调用model.train()会把所有的module设置为训练模式。如果是测试或验证阶段,需要使模型处于验证阶段,即调用model.eval(),调用model.eval()会把所有的training属性设置为False。缺省情况下梯度是累加的,调用optimizer.zero_grad()将梯度初始化或清零。训练过程中,正向传播生成网络的输出,计算输出和实际值之间的损失值。调用loss.backward()自动生成梯度,然后使用optimizer.step()执行优化器,把梯度传会并更新参数。也可以使用GPU进行网络的训练。
7、保存和加载模型
介绍保存和加载张量和模型参数
7.1、加载和保存张量
对于单个张量,可以直接调用load和save函数分别读取他们。这两个函数都要求我们提供一个名称,save要求将要保存的变量作为输入。
import torch
from torch import nn
from torch.nn import functional as F
x=torch.arange(4)
print(x)
#保存张量
torch.save(x,'x-file')
tensor([0, 1, 2, 3])
现在可以从存储文件中的数据读回内存。
x2=torch.load('x-file')
x2
tensor([0, 1, 2, 3])
可以存储一个张量列表,然后把他们读回内存。
y=torch.zeros(4)
torch.save([x,y],'xy-files')
x2,y2=torch.load('xy-files')
(x2,y2)
(tensor([0, 1, 2, 3]), tensor([0., 0., 0., 0.]))
还可以写入或读取从字符串映射到张量的字典
mydict={'x':x,'y':y}
torch.save(mydict,'mydict')
mydict2=torch.load('mydict')
mydict2
{'x': tensor([0, 1, 2, 3]), 'y': tensor([0., 0., 0., 0.])}
7.2、加载和保存模型参数(官方推荐)
深度学习框架提供了内置函数来保存和加载整个网络。需要注意的是,这将保存模型的参数而不是保存整个模型。因此在恢复模型的时候,需要用代码生成结构,然后从磁盘加载参数。
#构建一个多层感知机
class MLP(nn.Module):
def __init__(self):
super(MLP,self).__init__()
self.hidden=nn.Linear(20,256)
self.output=nn.Linear(256,10)
def forward(self,x):
return self.output(F.relu(self.hidden(x)))
net=MLP()
X=torch.rand(size=(2,20))
Y=net(X)
将模型的参数保存到一个叫“mlp.params”的文件中。
torch.save(net.state_dict(),"mlp.params")
为了恢复模型,我们实例化原始多层感知机的一个备份。没有随机初始化模型参数,而是直接读取文件中存储的参数。
clone=MLP()
clone.load_state_dict(torch.load('mlp.params'))
clone.eval()
MLP(
(hidden): Linear(in_features=20, out_features=256, bias=True)
(output): Linear(in_features=256, out_features=10, bias=True)
)
由于两个实例具有相同的模型参数,在输入相同的X时,两个实例的计算结果应该相同。
Y_clone=clone(X)
Y_clone==Y
tensor([[True, True, True, True, True, True, True, True, True, True],
[True, True, True, True, True, True, True, True, True, True]])
7.3、加载和保存整个模型(模型+参数)
首先构建一个模型。
import torch
from torch import nn
from torch.nn import functional as F
#构建一个多层感知机
class MLP(nn.Module):
def __init__(self):
super(MLP,self).__init__()
self.hidden=nn.Linear(20,256)
self.output=nn.Linear(256,10)
def forward(self,x):
return self.output(F.relu(self.hidden(x)))
net=MLP()
X=torch.rand(size=(2,20))
net(X)
tensor([[ 0.0579, -0.0811, 0.1751, 0.0401, 0.1001, -0.1680, 0.0061, -0.1768,
-0.0621, -0.1509],
[ 0.1113, 0.0192, 0.1754, -0.0482, 0.0619, -0.0059, 0.1285, -0.1294,
-0.0634, 0.0177]], grad_fn=)
保存整个模型:
torch.save(net,'mlp.pkl')
加载保存的整个模型,陷阱(加载的时候,必须引入模型所定义的类,否则会报错):
net2=torch.load('mlp.pkl')
net2,net2(X)
(MLP(
(hidden): Linear(in_features=20, out_features=256, bias=True)
(output): Linear(in_features=256, out_features=10, bias=True)
),
tensor([[ 0.0579, -0.0811, 0.1751, 0.0401, 0.1001, -0.1680, 0.0061, -0.1768,
-0.0621, -0.1509],
[ 0.1113, 0.0192, 0.1754, -0.0482, 0.0619, -0.0059, 0.1285, -0.1294,
-0.0634, 0.0177]], grad_fn=))
可见模型和网络均被保存了下来,使用加载的模型处理相同的数据,输出和原来的模型的输出是相同的。
8、GPU
GPU的发展已经到了较为成熟的阶段。利用GPU来训练深度神经网络,可以充分利用其计算核心的能力。提高深度神经网络的训练速度。Pytorch支持GPU,可以通过to(device)函数来将数据从内存转移到GPU显存上。Pytorch一般把GPU作用于张量(Tensor)或模型(包括torch.nn下面的一些网络模型以及自己创建的模型)等数据结构上。
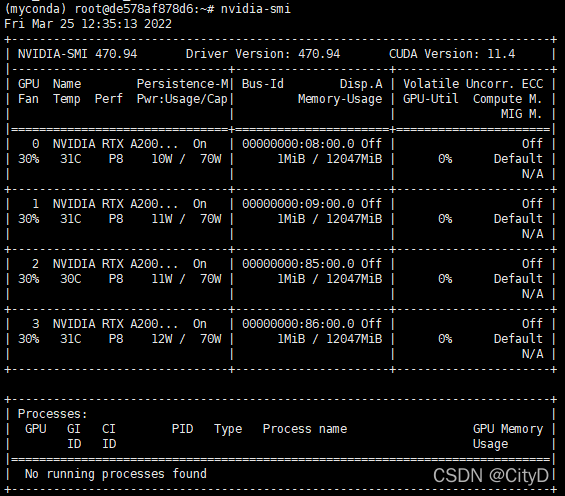
在使用GPU之前,需要确保至少安装了一个NVIDIA GPU。然后下载NVIDIA驱动和CUDA并按照提示设置适当的路径。当准备工作完成后,就可以使用nvidia-smi命令查看显卡信息。
在使用GPU之前,需要确保GPU是可用的,可以通过torch.cuda.is_available()方法的返回值进行判断。
import torch
torch.cuda.is_available()
True
8.1、计算设备
在Pytorch中,CPU和GPU可以用torch.device('cpu')和torch.cuda.device('cuda')表示。如果有多个GPU,可以使用torch.cuda.device(f'cuda:{i}')来表示第 i i i块GPU。另外,cuda:0和cuda是等价的。
import torch
from torch import nn
torch.device('cpu'),torch.cuda.device('cuda'),torch.cuda.device('cuda:1')
(device(type='cpu'),
,
)
可以利用下面的方法查询可用GPU的数量。
torch.cuda.device_count()
1
下面定义两个函数,这两个函数允许在请求GPU不存在的情况下运行代码。
#如果存在,则返回gpu(i),否则返回cpu
def try_gpu(i=0):
if torch.cuda.device_count()>=i+1:
return torch.device(f'cuda:{i}')
return torch.device('cpu')
#返回所有可用的gpu,如果没有gpu,则返回cpu
def try_all_gpus():
devices=[torch.device(f'cuda:{i}') for i in range(torch.cuda.device_count())]
return devices if devices else [torch.device('cpu')]
try_gpu(),try_gpu(10),try_all_gpus()
(device(type='cuda', index=0),
device(type='cpu'),
[device(type='cuda', index=0)])
8.2、张量与GPU
在默认情况下,张量是在CPU上创建的,我们可以查询张量所在的设备。
x=torch.tensor([1,2,3])
x.device
device(type='cpu')
如果对多个项进行操作,那么它们都必须在同一个设备上。需要确保需要操作的两个张量都位于同一个设备上,否则不知道在哪里存储结果,甚至不知道在哪里执行计算。
存储在GPU上
有几种方法可以再GPU上存储张量,一种是在创建张量的时候指定存储设备;另一种是在创建完张量之后将其放到GPU上。下面介绍这两种方法。
- 在创建张量的时候指定存储设备。
X=torch.ones(2,3,device=torch.device("cuda:0" if torch.cuda.is_available() else "cpu"))
#还可以这样写
XX=torch.ones(2,3).cuda(0)
X,XX
(tensor([[1., 1., 1.],
[1., 1., 1.]], device='cuda:0'),
tensor([[1., 1., 1.],
[1., 1., 1.]], device='cuda:0'))
也可以使用刚才定义的方法
X1=torch.ones(2,3,device=try_gpu())
X1
tensor([[1., 1., 1.],
[1., 1., 1.]], device='cuda:0')
- 创建张量之后将其放到GPU上,使用
.to(device)方法
import torch
X2=torch.ones(2,3)
X2.to(try_gpu())
X2.device
device(type='cpu')
按理说是可以的!!!,之后研究下在更新。
假设至少有两个GPU,下面的代码将在第二个GPU上运行,我的电脑没有~~~~。所以被放到了cpu上。
Y=torch.rand(2,3,device=try_gpu(1))
Y,Y.device
(tensor([[0.7841, 0.2906, 0.4341],
[0.6017, 0.4530, 0.0363]]),
device(type='cpu'))
X,Y存在不用的设备上,如果直接执行X+Y,将会报错,因此需要将X和Y放到同一个设备上才能正常运行。
X+Y
---------------------------------------------------------------------------
RuntimeError Traceback (most recent call last)
~\AppData\Local\Temp/ipykernel_2192/2223898888.py in
----> 1 X+Y
RuntimeError: Expected all tensors to be on the same device, but found at least two devices, cuda:0 and cpu!
Z=Y.cuda(0)
print(Y)
print(Z)
#然后执行X+Z
X+Z
tensor([[0.7841, 0.2906, 0.4341],
[0.6017, 0.4530, 0.0363]])
tensor([[0.7841, 0.2906, 0.4341],
[0.6017, 0.4530, 0.0363]], device='cuda:0')
tensor([[1.7841, 1.2906, 1.4341],
[1.6017, 1.4530, 1.0363]], device='cuda:0')
8.3、神经网络与GPU
类似地,神经网络也可以指定设备。下面的代码将模型参数放到GPU上。
net1 = nn.Sequential(nn.Linear(3,1))
net2 = nn.Sequential(nn.Linear(3,1))
net3 = nn.Sequential(nn.Linear(3,1))
#1.使用定义的方法
net1=net1.to(device=try_gpu())
#2.使用if判断
net2=net2.to(device=torch.device("cuda:0" if torch.cuda.is_available() else "cpu"))
#3.使用.cuda
net3=net3.cuda(0)
net1,net2,net3
(Sequential(
(0): Linear(in_features=3, out_features=1, bias=True)
),
Sequential(
(0): Linear(in_features=3, out_features=1, bias=True)
),
Sequential(
(0): Linear(in_features=3, out_features=1, bias=True)
))
当输入也为GPU上的张量时,模型将在同一GPU上计算结果
X=torch.ones(2,3,device=try_gpu())
net1(X),net2(X),net3(X)
(tensor([[-0.9122],
[-0.9122]], device='cuda:0', grad_fn=),
tensor([[-0.2564],
[-0.2564]], device='cuda:0', grad_fn=),
tensor([[-0.0785],
[-0.0785]], device='cuda:0', grad_fn=))
确认模型参数存储在同一个GPU上
net1[0].weight.data.device
device(type='cuda', index=0)