MATLAB实现的A*算法
MATLAB实现的A*算法
总共三个.m文件
1.Astar.m
clear;
clc;
%%
%设置地图参数
WIDTH = 40; %地图长度,即行数
LENGTH = 40; %地图长度,即列数
STARTPOINTX = WIDTH/4+2; %起点横坐标
STARTPOINTY = LENGTH/4+2; %起点纵坐标
ENDPOINTX = WIDTH-STARTPOINTX; %终点横坐标
ENDPOINTY = LENGTH-STARTPOINTY; %终点纵坐标
OBSTACLEAMOUNT = WIDTH*LENGTH/4; %障碍物数量,随机产生障碍物
%%
%将地图上的点初始化
point(WIDTH,LENGTH) = PointInfo;
for i = 1:WIDTH
for j = 1:LENGTH
point(i,j).xCoordinate = i; %坐标设置好
point(i,j).yCoordinate = j;
point(i,j).h = 10*(abs(i-ENDPOINTX) + abs(j-ENDPOINTY) ); %可以事先计算出H,H这里用曼哈顿距离
end %将H改为0,即Dijastra算法
end %将H改为Inf,即广度优先算法BFS
point(STARTPOINTX,STARTPOINTY).g = 0; %起始点的g实际代价为0 %将障碍物数量设置为0,可以更好地看出他们的区别
%%
%产生障碍物
point(STARTPOINTX,STARTPOINTY).isStartPoint = true;
point(ENDPOINTX,ENDPOINTY).isEndPoint = true;
tempX = 0; %定义随机障碍物的临时坐标
tempY = 0;
tempObs = OBSTACLEAMOUNT;
%rng(0); %去掉注释可使产生的随机障碍物不变
while tempObs > 0
tempX = randi(WIDTH,1); %randi产生1-WIDTH之间的随机整数
tempY = randi(LENGTH,1);
if ~( ((tempX == STARTPOINTX) && (tempY == STARTPOINTY)) || ((tempX == ENDPOINTX) && (tempY == ENDPOINTY)) ) %#ok<*ALIGN> %随机产生的点不能为起始点和终点
if ~point(tempX,tempY).isObstacle %只有不是障碍物的才能变成障碍物,不能重复设置
point(tempX,tempY).isObstacle = true;
tempObs = tempObs-1;
end
end
end
%%
%Astar算法的核心
openList = []; %#ok<NASGU> 存放待扩展的节点
closeList = []; %存放以后不需要处理的点
gCost = [14 10 14;10 0 10;14 10 14] ; %当前点的8个相邻点的实际代价值设置
flag1 = false; %算法结束的两种情况:终点在openList中或者openList为空,
flag2 = false;
%1.将起点加入openList
openList = [STARTPOINTX,STARTPOINTY,point(STARTPOINTX,STARTPOINTY).f]; %分为3列,分别代表点的x,y,f
point(STARTPOINTX,STARTPOINTY).isOpenList = true;
%2.重复以下步骤
tic %输出算法计算的时间,可用来比较算法的效率
while ~flag1 && ~flag2
%3.选取F最小的放在open表首部
[~,I] = sort(openList(:,3));
openList = openList(I,:);
%4.将F最小的点从openList移至closedList
currentX = openList(1,1); %存放当前最小F点的坐标
currentY = openList(1,2);
point(currentX,currentY).isCloseList = true;
point(currentX,currentY).isOpenList = false;
closeList = [closeList;openList(1,:)]; %#ok<AGROW>
openList(1,:)=[];
%5.根据周围的点是否在openList,采取两种不同的操作,分别如下:
for i = -1:1
tempX = currentX+i; %用for循环获取相邻点的坐标(tempX,tempY)
for j =-1:1
tempY = currentY+j; %如果周围点不是边界或者不在closedList或者障碍物,才能继续往下走
if (tempX>=1) && (tempY>=1) && (tempX<=WIDTH) && (tempY<=LENGTH) && (~point(tempX,tempY).isObstacle) && (~point(tempX,tempY).isCloseList)
%i.如果周围的点在openList里,检查这条路径(即经由当前方格到达它那里)是否更好,用G值作参考;
tempG = gCost(i+2,j+2)+point(currentX,currentY).g; %计算经由当前方格到该点的G值
if point(tempX,tempY).isOpenList
%如果G更小,则把它的父亲设置为当前方格,并重新计算它的G和F值,并重新排序openList,否则什么都不做
if tempG < point(tempX,tempY).g %如果G更小
point(tempX,tempY).parent = point(currentX,currentY); %把它的父亲设置为当前方格
point(tempX,tempY).g = tempG; %并重新计算它的G和F值
[~,I] = sort(openList(:,3)); %重新排序openList
openList = openList(I,:);
end
%ii.如果不在openList,把它加入 openList,并且把当前方格设置为它的父亲,记录该方格的 F,G 和 H 值。
else
point(tempX,tempY).g = tempG; %先计算G和H值,再加入openList
point(tempX,tempY).parent = point(currentX,currentY);
point(tempX,tempY).isOpenList = true; %加入openList
openList = [openList;tempX,tempY,point(tempX,tempY).f]; %#ok<AGROW>
end
end
end
%6.检查是否能够结束算法,即终点是否已经在openList中或者openList是否为空。
flag1 = point(ENDPOINTX,ENDPOINTY).isOpenList;
flag2 = isempty(openList);
end
end
toc
%%
if flag1 %flag1位true,即找到了最短路径,用pointPrint输出路线
disp( "路线总代价为:"+ point(ENDPOINTX,ENDPOINTY).f );
disp("路线为(从下向上看):");
pointPrint(point,ENDPOINTX,ENDPOINTY);
else
disp("未找到路径");
end
2.PointInfo.m
classdef PointInfo
%点的类属性
%点的一些基本信息
properties
xCoordinate;
yCoordinate;
isStartPoint = false; %是否是起点
isEndPoint = false; %是否是终点
isObstacle = false; %是否是障碍物
isCloseList = false; %是否在closed表
isOpenList = false; %是否在open表
iskeyPoint = false; %是否是最短路径上的点
g = Inf; %g,点到待扩展点的实际代价
h = Inf; %h,待扩展点到终点的估计代价
parent; %点的父节点,倒着遍历即可找到路径
end
properties(Dependent) %f一直等于g+h,故将其设为独立的属性,自动计算
f;
end
methods
function value = get.f(obj)
value = obj.g+obj.h;
end
end
end
3.pointPrint.m
function pointPrint(point,ENDPOINTX,ENDPOINTY)
%POINTPRINT:输出地图及路径的函数
%输入地图信息及终点,根据其父节点,即可找到路径
%首先根据父节点找出路线中的关键点,根据最后一个节点往前找
tempPoint = point(ENDPOINTX,ENDPOINTY); %定义一个临时结点存放父节点信息
path = []; %PATH保存路径点
while ~isempty(tempPoint.parent)
tempPoint = tempPoint.parent;
tempX = tempPoint.xCoordinate;
tempY = tempPoint.yCoordinate;
disp("("+tempX+","+tempY+")");
point(tempX,tempY).iskeyPoint = true;
path = [path;tempX,tempY]; %#ok<AGROW>
end
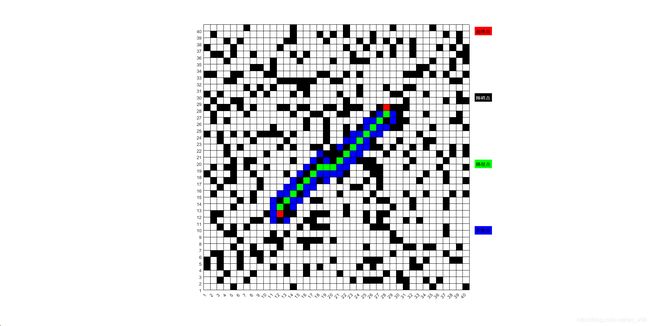
%输出地图情况
colormap([0 0 0;1 1 1;1 0 0;0 1 0;0 0 1]);%设置颜色,分别代表0黑色、1白色、2红色、3绿色、4蓝色
map = ones(size(point,1),size(point,2));
for i = 1:size(map,1) %#ok<ALIGN>
for j = 1:size(map,2) %#ok<ALIGN>
if point(i,j).isStartPoint
map(i,j) = 2; %起点用红色表示
elseif point(i,j).isEndPoint
map(i,j) = 2; %终点也用红色表示
elseif point(i,j).isObstacle
map(i,j) = 0; %障碍物用黑色表示
elseif point(i,j).isCloseList || point(i,j).isOpenList
map(i,j) = 4; %扩展点用蓝色表示
else
map(i,j) = 1; %普通点用白色表示
end
end
end
map(i+1,j+1) = 5; %需将map扩展一格
pcolor(map); %输出除路径点以外的静态点
%colorbar; %可查看颜色情况
set(gca,'XTick',1:size(map,2)-1,'YTick',1:size(map,1)-1); %设置坐标轴
axis image xy; %沿每个坐标轴使用相同的数据单位,保持一致
hold on;
t =text(j+2,i,'起终点'); %用text输出图例
t.BackgroundColor = 'r';
t.FontWeight = 'bold' ;
t =text(j+2,i*3/4,'障碍点');
t.BackgroundColor =[0 0 0];
t.FontWeight = 'bold' ;
t.Color = [1 1 1];
t =text(j+2,i/2,'路径点');
t.BackgroundColor ='g';
t.FontWeight = 'bold' ;
t =text(j+2,i/4,'扩展点');
t.BackgroundColor = 'b';
t.FontWeight = 'bold' ;
%动态输出路径点,用绿色表示
for i = flip(1:size(path,1)-1) %因路径点是倒着存放的,需翻转一下,且最后一个点是起点,无需输出
x = path(i,1);
y = path(i,2);
fill([y,y+1,y+1,y],[x,x,x+1,x+1],'g'); %输出除路径点以外的静态点
pause(0.01); %延时0.01s,可据此设置动态输出频率
end
hold off
end