SLAM14讲 01
欧式变换:
在欧式变换前后的两个坐标系下,同一个向量的模长和方向不发生改变,是为欧式变换.
一个欧式变换由一个旋转和一个平移组成。

齐次坐标
齐次坐标:将n维的向量用n+1维向量表示,我们常用在3维向量末尾添加1变成4维的齐次坐标。
引入齐次坐标的目的是合并矩阵运算中的加法和乘法。
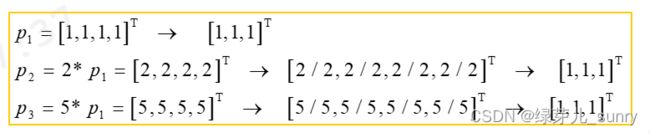
在齐次坐标中,某个点p的每个分量同乘以一个非0常数w,仍然表示3维空间中同一个点。
齐次坐标(Xc , Yc , Zc ,1)T 对应3维空间的点为(Xc , Yc , Zc)T 。
如下所示:
为什么要用到李群和李代数?
避免一直是数学上的推导。
假设某个时刻我们预测机器人的位姿为 T (待定值), 它观测到了一个惯性坐标系下的点 p 而产生了一个观测数据 z ,它是该点在相机坐标系下的坐标,则可得
z=Tp+ω
其中, ω 是观测噪声。由于观测噪声的存在, z 无法严格满足式 z=Tp。因此而产生的误差 e 为
e=z−Tp
若共有N 个观测值,那么就有N 个这样的式子。机器人的位姿估计就转变成寻找一个最优的 T 使得整体的误差最小化:
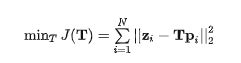
通常,直接求解上式得出最优的 T 是很困难的(或计算量很大)。我们常常先给定一个猜测值(初始值) T0 ,然后不断地对它进行迭代更新。而这个过程需要用到导数(可以想想梯度下降法)。回顾导数的定义

显然计算导数和进行更新时都要用到加法。但SO(3) 和SE(3) 上对矩阵加法的运算并不封闭。如果要继续采取这个迭代更新的策略势必要再想想办法,使得导数“可行”。而这就可以通过李群及其对应的李代数来实现。
参考:https://zhuanlan.zhihu.com/p/33156814
角点
角点是图像很重要的特征,某方面属性特别突出的点,是在某些属性上强度最大或者最小的孤立点、线段的终点等。对图像图形的理解和分析有很重要的作用。角点在保留图像图形重要特征的同时,可以有效地减少信息的数据量,使其信息的含量很高,有效地提高了计算的速度,有利于图像的可靠匹配,使得实时处理成为可能。


图参考:https://blog.csdn.net/weixin_41809077/article/details/125466380
李群与李代数
R在原点附近的一阶泰勒展开,我们看到这个向量φ=(φ1,φ2,φ3)反应了R的导数性质,故称它在SO(3)上的原点 φ0 附近的正切空间上。这个φ正是李群大SO(3)对应的李代数小so(3)
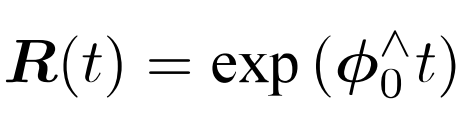
李代数小so(3)是三维向量φ的集合,每个向量φi的反对称矩阵都可以表达李群(大SO(3))上旋转矩阵R的导数,而R和φ是一个指数映射关系。也就是说,李群空间的任意一个旋转矩阵R都可以用李代数空间的一个向量的反对称矩阵指数来近似
泰勒公式:

参考:https://mp.weixin.qq.com/s/sVjy9kr-8qc9W9VN78JoDQ
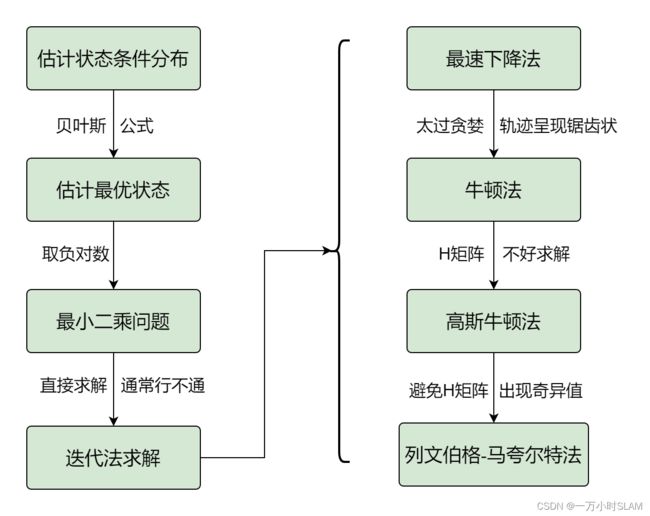
状态估计

我们已知的是:运动方程、观测方程、运动数据、图片数据;
我们求解目标的是:相机各个时刻的位姿和路标点的世界坐标。
概括起来就是:在已知SLAM模型的情况下,通过带噪声的数据z和u推断位姿x和地图y的概率分布,这是一个状态估计问题。
状态估计问题如何求解呢?
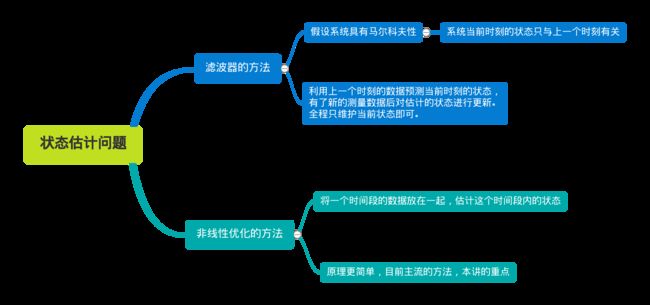
参考:https://blog.csdn.net/weixin_42126210/article/details/123648742