- C++学习记录与心得(一)类和对象
SOULHENG
C++学习
一、写在开头记录自己的学习过程也是为自己的学习生涯做一点标记,既可以方便以后查阅,对我本人来说也可以起到促进学习的作用。本人之前会一点c语言,现在跟着课程向导学习一点c++的基本知识。笔者自身也是处于学习之中,如果有什么不对的地方希望大家不吝赐教。二、类和对象1.c++与c不同的一点就是C++中有类和对象之说,public中定义公用的数据和成员函数,private下定义私有的数据和成员函数。公用的
- C语言学习记录(4)青年歌手大奖赛_评委会打分
舌尖上的五香
C语言
C语言学习记录前言一直自己没有学习做笔记的习惯,所以为了加强自己对知识的深入理解,决定将学习笔记写下来,希望向各位大牛们学习交流!不当之处请斧正!在此感谢!这边就先从学习C语言写起,自己本身对程序语言方面不擅长,所以决定对此从基础开始学习,大牛们对此文可以忽略!学校的OJ上的题青年歌手大奖赛_评委会打分题目描述青年歌手大奖赛中,评委会给参赛选手打分。选手得分规则为去掉一个最高分和一个最低分,然后计
- 设计模式13:职责链模式
MatthewMao
设计模式设计模式qt职责链模式
系列总链接:《大话设计模式》学习记录_net大话设计-CSDN博客1.概述职责链模式(ChainofResponsibilityPattern)是一种行为设计模式,它允许将请求沿着处理者链传递,直到有一个处理者能够处理该请求。这种模式通过避免发送者和接收者之间的直接耦合,使得多个对象都有机会处理请求,从而增强了系统的灵活性和可扩展性。每个处理者包含对其下一个处理者的引用,如果当前处理者无法处理请求
- Pytorch实现mnist手写数字识别
Zn要学习
python
>-**本文为[365天深度学习训练营]中的学习记录博客**>-**原作者:[K同学啊]**我的环境:语言环境:Python3.8编译器:JupyterLab深度学习环境:torch==1.12.1+cu113torchvision==0.13.1+cu113一、前期准备1.设置GPU如果设备上支持GPU就使用GPU,否则使用CPUimporttorchimporttorch.nnasnnimpo
- 2025-02-13 学习记录--C/C++-PTA 7-16 求符合给定条件的整数集
小呀小萝卜儿
学习-C/C++学习c语言
一、题目描述⭐️二、代码(C语言)⭐️#includeintmain(){intA,//用户输入的不超过6的正整数Acount=0;//满足条件的整数个数,初始化为0scanf("%d",&A);//输入A//生成并输出满足条件的三位数for(inti=A;i
- 第N11周:seq2seq翻译实战-Pytorch复现
计算机真好丸
pytorch人工智能python
文章目录一、前期准备1.搭建语言类2.文本处理函数3.文件读取函数二、Seq2Seq模型1.编码器(encoder)2.解码器(decoder)三、训练1.数据预处理2.训练函数3.评估四、评估与训练1.Loss图2.可视化注意力五、总结本文为365天深度学习训练营中的学习记录博客原作者:K同学啊一、前期准备from__future__importunicode_literals,print_fu
- 第N5周:Pytorch文本分类入门
计算机真好丸
pytorch分类人工智能
文章目录一、前期准备1.环境安装2.加载数据3.构建词典4.生成数据批次和迭代器二、准备模型1.定义模型2.定义实例三、训练模型1.拆分数据集并运行模型2.使用测试数据集评估模型本文为365天深度学习训练营中的学习记录博客原作者:K同学啊一、前期准备1.环境安装确保安装了torchtext与portalocker库2.加载数据importtorch#强制使用CPUdevice=torch.devi
- 第TR5周:Transformer实战:文本分类
计算机真好丸
transformer分类深度学习
文章目录1.准备环境1.1环境安装1.2加载数据2.数据预处理2.1构建词典2.2生成数据批次和迭代器2.3构建数据集3.模型构建3.1定义位置编码函数3.2定义Transformer模型3.3初始化模型3.4定义训练函数3.5定义评估函数4.训练模型4.1模型训练5.总结:本文为365天深度学习训练营中的学习记录博客原作者:K同学啊1.准备环境1.1环境安装这是一个使用PyTorch通过Tran
- 【学习记录】AVL树及相关链表,线程池实现
liarsup
学习链表windows
本来打算使用avl树套链表的结构,来避免优先级相等的情况,但是最后发现当绝大多数优先级都相等,avl树还是不可避免的退化成单链表,而需求中也确实是绝大多数都是优先级相等。所以评估之后觉得avl树带来的提升远不及其提升的复杂度,所以放弃该方案,改为链表实现,现将此前实验的代码整理如下,AVL树部分应该没有问题。重要步骤做了注释.c文件如下////CreatedbyAdministratoron202
- opencv全面详解教程
听忆.
机器学习深度学习计算机视觉人工智能
opencv全面详解教程1.OpenCV简介2.安装OpenCV2.1使用pip安装(适用于Python)2.2通过conda安装2.3从源码编译(高级)3.OpenCV基本操作3.1读取和显示图像3.2保存图像3.3视频处理4.图像处理操作4.1调整大小和裁剪4.2颜色空间转换4.3图像平滑(滤波)4.4边缘检测5.形态学操作6.特征检测与匹配6.1角点检测(Harris)6.2SIFT、SUR
- 2025-02-13 学习记录--C/C++-PTA 7-14 求整数段和
小呀小萝卜儿
学习-C/C++学习c语言
一、题目描述⭐️给定两个整数A和B,输出从A到B的所有整数以及这些数的和。输入格式:给定两个整数A和B,输出从A到B的所有整数以及这些数的和。输出格式:首先顺序输出从A到B的所有整数,每5个数字占一行,每个数字占5个字符宽度,向右对齐。最后在一行中按Sum=X的格式输出全部数字的和X。输入样例:-38输出样例:二、代码(C语言)⭐️#includeintmain(){intA,B,//2个整数A和
- 【OpenCV-Python】——哈里斯/Shi-Tomas角检测&FAST/SIFT/ORB特征点检测&暴力/FLANN匹配器&对象查找
柯宝最帅
OpenCV学习计算机视觉人工智能
目录前言:1、角检测1.1哈里斯角检测1.2优化哈里斯角1.3Shi-Tomasi角检测2、特征点检测2.1FAST特征点检测2.2SIFT特征检测2.3ORB特征检测3、特征匹配3.1暴力匹配器3.2FLANN匹配器4、对象查找总结:前言:图像的特征是指图像中具有独特性和易识别性的区域,如角和边缘等。提取特征并对其进行描述,便于图像匹配和搜索。1、角检测1.1哈里斯角检测cv2.conerHar
- Flutter_学习记录_数据更新的学习
一人前行
flutter学习flutter
Flutter如果界面上有数据更新时,目前学习到的有3种:第一种:直接用StatefulWidget组件,然后当数据更新时,调用setState的方法更新数据,页面上的数据会直接更新;第二种:用StatefulWidget组件和InheritedWidget的结合,这种模式比较适用于有比较多层级的场景;这样数据更新时,就不用一层一层的从父类上传递数据;第三种:用第三方库scoped_model,这
- Springboot(五十)SpringBoot3集成sentinel并连接sentinel-dashboard
camellias_
springbootsentinel后端
对,你没看错,又是sentinel。我真是够了,而且,我觉得这应该不是最后一次,以后应该还会写到关于sentinel的学习记录。前边我们了解了sentinel如何使用。相对来讲还是比较简单的。之后学到自定义注解的时候,还自定义了一个sentinel注解来实现限流。用着相对来讲还是很方便的。但是呢,有一个小小的问题。官方推荐使用sentinel-dashboard,这玩意我一直没用明白。我得项目一直
- PyQt学习记录03——批量设置水印
XS30
PyQt学习pyqt学习
0.目录PyQt学习记录01——加法计算器PyQt学习记录02——串口助手1.前言本次主要是为了学习Qt中的QFileDialog函数,QFileDialog.getExistingDirectory:用于选择文件夹,返回的是一个文件夹路径。QFileDialog.getOpenFileName:用于选择单个文件。返回的是文件的完整路径。以及通过importlib.util实现跨文件的函数调用,即
- 《InsideUE4》GamePlay架构学习_Pawn
ZengSZ_00
《InsideUE4》GamePlay架构学习Pawn前言ComponentActorPawnDefaultPawn,SpectatorPawn,CharacterDefaultPawnSpectatorPawnCharacter思考为何Actor也能接受Input事件?Pawn前言本次系列是关于知乎InsideUE系列的学习记录。原作链接如下:原文链接前面我们学习了大钊老师有关于Gameplay
- C++基础知识学习记录—引用
墨楠。
学习
1、引用的概念概念:引用相当于给变量取个别名对引用进行操作与直接操作变量相同,注意引用类型与变量类型一致#includeusingnamespacestd;intmain(){inta=10;int&cite_a=a;//操作引用cite_a与操作变量a完全一样coutusingnamespacestd;intmain(){inta=10;int&cita_a=a;//引用的性质1:称为一个变量的
- Java实现kaptcha网页验证码验证,你会吗???
一个爱运动的程序员
Java基础java后端springboot
在做关于SSM项目之商铺系统时,了解到了kaptcha实现网页验证码验证,感觉就很有趣,所以便开始学习记录了起来|ू・ω・`),复制粘贴即可用。文章目录一、引入Maven依赖二、编写Servlet三、编写:页面、判断与跳转1、只有数字的验证码2、含义数字、字母、中文的验证码3、两个数相加的验证码首先来了解一下什么是验证码:验证码(CAPTCHA)∶是一种区分用户是计算机还是人的公共全自动程序。作用
- PyQt5/Pyside2学习记录
黎猫大侠
qt学习开发语言pyqt
前言最近导师的项目要求是PyQt,现学现用,现在写下中间的一些注意事项。本程序分为两个界面,要求两个界面能堆叠显示,一个首页界面,一个功能界面。在功能界面中,有三个操控的控件,下拉框、文本框和确认按钮;还有三个区域显示两个图片和一个动画。工具栏中有四个点击项,前两个是实现首页和功能界面的切换,剩下两个是用来弹出新窗口,显示文档的,记录几个重要的知识点。富文本可以显示公式Layout可以控制自适应虽
- C 语言学习记录:数组相关知识
Aphelios380
算法c++数据结构
一、未来的规划目录下一期将会对大学生学习C语言中遇到的常见考点,单独做一期经典案例讲解加之前讲到的练习题做个合集发出来,还望期待一手!在深入学习C语言的道路上,数组是一个非常重要的知识点。以下是我学习C语言的整体规划目录,今天主要聚焦于数组部分,也是过完年后把这部分的最后篇给更出来,后续更新会更加勤勉:什么是C语言第一个C语言程序数据类型变量,常量字符串+转义字符+注释选择语句循环语句函数数组二、
- 行人检测系统:基于YOLOv5的行人检测与UI界面实现
深度学习&目标检测实战项目
YOLOuipython开发语言深度学习视觉检测计算机视觉
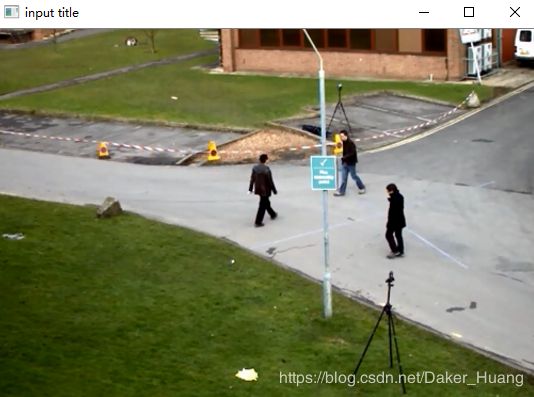
1.引言行人检测(PedestrianDetection)是计算机视觉中的一个重要任务,广泛应用于自动驾驶、智能安防、交通监控等领域。行人检测的目标是从图像或视频中检测出行人的位置,并标出其在图像中的边界框。随着深度学习技术的快速发展,YOLO(YouOnlyLookOnce)系列模型在目标检测任务中表现出了极高的准确性和速度,成为了行人检测的常用工具。本文将详细介绍如何使用YOLOv5实现行人检
- 数据库学习记录 Day2(JDBC)
赈川
JDBCJDBCMySqlJava
文章目录Day2JDBC简介JDBC的流程DriverManagerl类数据库URL详解Connection类ResultSet类释放资源Statement对象介绍CRUD操作建立JDBC工具类Day22019年7月6日。这是我学习数据库的第二天。这一天,我学到了以下的知识。JDBC简介JDBC(JavaDatabaseConnectivity),SUN公司为了简化、统一对数据库的操作,定义了一套
- 微信小程序开发学习笔记——3.6【小案例】熟练使用事件与数据绑定取随机值
Qy_cm
小程序开发学习笔记微信小程序学习笔记
>>跟着b站up主“咸虾米_”学习微信小程序开发中,把学习记录存到这方便后续查找。课程连接:https://www.bilibili.com/video/BV19G4y1K74d?p=20点击时模块颜色发生改变,并产生随机数。一、代码event.wxss中添加如下代码.box{margin:50rpx;width:200rpx;height:200rpx;background:pink;color
- 【学习记录】使用高德地图API开发一个简单基础的WebGIS系统(GIS考研院校专题地图网站)
Simon_Fitz
学习javascript
文章目录0.前言1.功能设计2.数据处理3.项目结构4.功能实现4.1.初始化4.2.地图基础功能模块4.2.1.放大缩小功能,图层管理功能4.2.2.地图测量功能,几何绘制功能4.3.导航规划功能模块4.4.POI检索功能模块4.5.专题数据加载5.总结0.前言本人只是一个普普通通的GIS学生,下面是记录我的写的一个作业demo的内容,可能会存在一定的错误,欢迎在评论区\私信交流!*完整功能展示
- 日拱一卒(20)——leetcode学习记录:大小为 K 且平均值大于等于阈值的子数组数目
特立独行的Q
leetcode学习算法
一、题目给定数组,统计数组中长度为k的子数组且该子数组的平均值大于threshold的数量二、思路滑动窗思路,计算长度为k的滑动窗的平均值,关键点在于,每滑动一次,只需要去掉头增加尾,而不需要重新全部计算,进而将计算量从O(n*k)降低为O(n)三、题解classSolution:defnumOfSubarrays(self,arr,k,threshold):curr=sum(arr[:k])n=
- ESP32开发学习记录---》GPIO
且撷相思红豆枝
ESP32IDFc++算法开发语言
she2025年2月5日,新年后决定开始充电提升自己,故作此记,以前没有使用过IDF开发ESP32因此新年学习一下ESP32。ESPIDF开发环境配置网上已经有很多的资料了,我就不再赘述,我这里只是对我的学习经历的一些记录。首先学习一个芯片我们当然先使用的GPIO设置啦,GPIO对一个单片机来说相当于各个语言的helloworld。那么第一章学习我们就从GPIO配置开始吧,学习一个单片机的最应该做
- Python函数学习记录--七十二变
lemon_caca
python
目录1.术之本源--函数的定义2.灵力流转--参数与返回值2.1参数2.1.1位置参数2.1.2默认参数2.1.3关键字参数2.1.4可变参数--*args2.1.5可变参数--**kwargs2.1.6*args和**kwargs同时使用2.1.7特殊字符--/和*2.2返回值3.无尽丹田--作用域3.1global3.2nonlocal4身化万千--高阶函数4.1函数作为参数4.2函数作为返回
- python数据类型学习记录--神话与数据类型
lemon_caca
python
目录1.众神云集--数字类型1.1玉皇大帝--整数(int)1.2嫦娥--浮点数(float)1.3太上老君--复数(complex)1.4数字类型的通用特性1.4.1类型转换1.4.2数学函数1.4.3随机数及随机数的复现2.齐天大圣--字符串类型2.1字符串的创建2.2字符串常见操作2.3字符串的其他用法2.4字符串格式化2.4.1%格式化2.4.2str.format()2.4.3f-str
- T1:实现mnist手写数字识别
哈维羊
neo4j
>-**本文为[365天深度学习训练营](https://mp.weixin.qq.com/s/0dvHCaOoFnW8SCp3JpzKxg)中的学习记录博客**>-**原作者:[K同学啊](https://mtyjkh.blog.csdn.net/)**写在最前:目标1.知道如何配置环境2.跑通模型(不报错)3.储存模型,供后续使用4.了解如何衡量模型训练结果是否是优秀一、环境配置编译器:PyC
- 每日一题———37.堆排序
而塞过
每日一题堆数据结构大根堆小根堆建堆算法时间复杂度
前言数据结构每日一题声明:因个人能力有限,本文仅是个人的学习记录笔记,有错误之处还望指出概念堆:n个关键序列L[1,2…n],满足下面一条性质称为堆大根堆:满足L(i)>=L(2i)且L(i)>=L(2i+1)小根堆:满足L(i)=左右与顺序无关,小根堆也一样:只要满足:根左右子树端点)不满足则进行调整,将更小的元素下坠,一直到满足要求//建立大根堆voidBuildMaxHeap(inta[],
- Linux的Initrd机制
被触发
linux
Linux 的 initrd 技术是一个非常普遍使用的机制,linux2.6 内核的 initrd 的文件格式由原来的文件系统镜像文件转变成了 cpio 格式,变化不仅反映在文件格式上, linux 内核对这两种格式的 initrd 的处理有着截然的不同。本文首先介绍了什么是 initrd 技术,然后分别介绍了 Linux2.4 内核和 2.6 内核的 initrd 的处理流程。最后通过对 Lin
- maven本地仓库路径修改
bitcarter
maven
默认maven本地仓库路径:C:\Users\Administrator\.m2
修改maven本地仓库路径方法:
1.打开E:\maven\apache-maven-2.2.1\conf\settings.xml
2.找到
- XSD和XML中的命名空间
darrenzhu
xmlxsdschemanamespace命名空间
http://www.360doc.com/content/12/0418/10/9437165_204585479.shtml
http://blog.csdn.net/wanghuan203/article/details/9203621
http://blog.csdn.net/wanghuan203/article/details/9204337
http://www.cn
- Java 求素数运算
周凡杨
java算法素数
网络上对求素数之解数不胜数,我在此总结归纳一下,同时对一些编码,加以改进,效率有成倍热提高。
第一种:
原理: 6N(+-)1法 任何一个自然数,总可以表示成为如下的形式之一: 6N,6N+1,6N+2,6N+3,6N+4,6N+5 (N=0,1,2,…)
- java 单例模式
g21121
java
想必单例模式大家都不会陌生,有如下两种方式来实现单例模式:
class Singleton {
private static Singleton instance=new Singleton();
private Singleton(){}
static Singleton getInstance() {
return instance;
}
- Linux下Mysql源码安装
510888780
mysql
1.假设已经有mysql-5.6.23-linux-glibc2.5-x86_64.tar.gz
(1)创建mysql的安装目录及数据库存放目录
解压缩下载的源码包,目录结构,特殊指定的目录除外:
- 32位和64位操作系统
墙头上一根草
32位和64位操作系统
32位和64位操作系统是指:CPU一次处理数据的能力是32位还是64位。现在市场上的CPU一般都是64位的,但是这些CPU并不是真正意义上的64 位CPU,里面依然保留了大部分32位的技术,只是进行了部分64位的改进。32位和64位的区别还涉及了内存的寻址方面,32位系统的最大寻址空间是2 的32次方= 4294967296(bit)= 4(GB)左右,而64位系统的最大寻址空间的寻址空间则达到了
- 我的spring学习笔记10-轻量级_Spring框架
aijuans
Spring 3
一、问题提问:
→ 请简单介绍一下什么是轻量级?
轻量级(Leightweight)是相对于一些重量级的容器来说的,比如Spring的核心是一个轻量级的容器,Spring的核心包在文件容量上只有不到1M大小,使用Spring核心包所需要的资源也是很少的,您甚至可以在小型设备中使用Spring。
- mongodb 环境搭建及简单CURD
antlove
WebInstallcurdNoSQLmongo
一 搭建mongodb环境
1. 在mongo官网下载mongodb
2. 在本地创建目录 "D:\Program Files\mongodb-win32-i386-2.6.4\data\db"
3. 运行mongodb服务 [mongod.exe --dbpath "D:\Program Files\mongodb-win32-i386-2.6.4\data\
- 数据字典和动态视图
百合不是茶
oracle数据字典动态视图系统和对象权限
数据字典(data dictionary)是 Oracle 数据库的一个重要组成部分,这是一组用于记录数据库信息的只读(read-only)表。随着数据库的启动而启动,数据库关闭时数据字典也关闭 数据字典中包含
数据库中所有方案对象(schema object)的定义(包括表,视图,索引,簇,同义词,序列,过程,函数,包,触发器等等)
数据库为一
- 多线程编程一般规则
bijian1013
javathread多线程java多线程
如果两个工两个以上的线程都修改一个对象,那么把执行修改的方法定义为被同步的,如果对象更新影响到只读方法,那么只读方法也要定义成同步的。
不要滥用同步。如果在一个对象内的不同的方法访问的不是同一个数据,就不要将方法设置为synchronized的。
- 将文件或目录拷贝到另一个Linux系统的命令scp
bijian1013
linuxunixscp
一.功能说明 scp就是security copy,用于将文件或者目录从一个Linux系统拷贝到另一个Linux系统下。scp传输数据用的是SSH协议,保证了数据传输的安全,其格式如下: scp 远程用户名@IP地址:文件的绝对路径
- 【持久化框架MyBatis3五】MyBatis3一对多关联查询
bit1129
Mybatis3
以教员和课程为例介绍一对多关联关系,在这里认为一个教员可以叫多门课程,而一门课程只有1个教员教,这种关系在实际中不太常见,通过教员和课程是多对多的关系。
示例数据:
地址表:
CREATE TABLE ADDRESSES
(
ADDR_ID INT(11) NOT NULL AUTO_INCREMENT,
STREET VAR
- cookie状态判断引发的查找问题
bitcarter
formcgi
先说一下我们的业务背景:
1.前台将图片和文本通过form表单提交到后台,图片我们都做了base64的编码,并且前台图片进行了压缩
2.form中action是一个cgi服务
3.后台cgi服务同时供PC,H5,APP
4.后台cgi中调用公共的cookie状态判断方法(公共的,大家都用,几年了没有问题)
问题:(折腾两天。。。。)
1.PC端cgi服务正常调用,cookie判断没
- 通过Nginx,Tomcat访问日志(access log)记录请求耗时
ronin47
一、Nginx通过$upstream_response_time $request_time统计请求和后台服务响应时间
nginx.conf使用配置方式:
log_format main '$remote_addr - $remote_user [$time_local] "$request" ''$status $body_bytes_sent "$http_r
- java-67- n个骰子的点数。 把n个骰子扔在地上,所有骰子朝上一面的点数之和为S。输入n,打印出S的所有可能的值出现的概率。
bylijinnan
java
public class ProbabilityOfDice {
/**
* Q67 n个骰子的点数
* 把n个骰子扔在地上,所有骰子朝上一面的点数之和为S。输入n,打印出S的所有可能的值出现的概率。
* 在以下求解过程中,我们把骰子看作是有序的。
* 例如当n=2时,我们认为(1,2)和(2,1)是两种不同的情况
*/
private stati
- 看别人的博客,觉得心情很好
Cb123456
博客心情
以为写博客,就是总结,就和日记一样吧,同时也在督促自己。今天看了好长时间博客:
职业规划:
http://www.iteye.com/blogs/subjects/zhiyeguihua
android学习:
1.http://byandby.i
- [JWFD开源工作流]尝试用原生代码引擎实现循环反馈拓扑分析
comsci
工作流
我们已经不满足于仅仅跳跃一次,通过对引擎的升级,今天我测试了一下循环反馈模式,大概跑了200圈,引擎报一个溢出错误
在一个流程图的结束节点中嵌入一段方程,每次引擎运行到这个节点的时候,通过实时编译器GM模块,计算这个方程,计算结果与预设值进行比较,符合条件则跳跃到开始节点,继续新一轮拓扑分析,直到遇到
- JS常用的事件及方法
cwqcwqmax9
js
事件 描述
onactivate 当对象设置为活动元素时触发。
onafterupdate 当成功更新数据源对象中的关联对象后在数据绑定对象上触发。
onbeforeactivate 对象要被设置为当前元素前立即触发。
onbeforecut 当选中区从文档中删除之前在源对象触发。
onbeforedeactivate 在 activeElement 从当前对象变为父文档其它对象之前立即
- 正则表达式验证日期格式
dashuaifu
正则表达式IT其它java其它
正则表达式验证日期格式
function isDate(d){
var v = d.match(/^(\d{4})-(\d{1,2})-(\d{1,2})$/i);
if(!v) {
this.focus();
return false;
}
}
<input value="2000-8-8" onblu
- Yii CModel.rules() 方法 、validate预定义完整列表、以及说说验证
dcj3sjt126com
yii
public array rules () {return} array 要调用 validate() 时应用的有效性规则。 返回属性的有效性规则。声明验证规则,应重写此方法。 每个规则是数组具有以下结构:array('attribute list', 'validator name', 'on'=>'scenario name', ...validation
- UITextAttributeTextColor = deprecated in iOS 7.0
dcj3sjt126com
ios
In this lesson we used the key "UITextAttributeTextColor" to change the color of the UINavigationBar appearance to white. This prompts a warning "first deprecated in iOS 7.0."
Ins
- 判断一个数是质数的几种方法
EmmaZhao
Mathpython
质数也叫素数,是只能被1和它本身整除的正整数,最小的质数是2,目前发现的最大的质数是p=2^57885161-1【注1】。
判断一个数是质数的最简单的方法如下:
def isPrime1(n):
for i in range(2, n):
if n % i == 0:
return False
return True
但是在上面的方法中有一些冗余的计算,所以
- SpringSecurity工作原理小解读
坏我一锅粥
SpringSecurity
SecurityContextPersistenceFilter
ConcurrentSessionFilter
WebAsyncManagerIntegrationFilter
HeaderWriterFilter
CsrfFilter
LogoutFilter
Use
- JS实现自适应宽度的Tag切换
ini
JavaScripthtmlWebcsshtml5
效果体验:http://hovertree.com/texiao/js/3.htm
该效果使用纯JavaScript代码,实现TAB页切换效果,TAB标签根据内容自适应宽度,点击TAB标签切换内容页。
HTML文件代码:
<!DOCTYPE html>
<html xmlns="http://www.w3.org/1999/xhtml"
- Hbase Rest API : 数据查询
kane_xie
RESThbase
hbase(hadoop)是用java编写的,有些语言(例如python)能够对它提供良好的支持,但也有很多语言使用起来并不是那么方便,比如c#只能通过thrift访问。Rest就能很好的解决这个问题。Hbase的org.apache.hadoop.hbase.rest包提供了rest接口,它内嵌了jetty作为servlet容器。
启动命令:./bin/hbase rest s
- JQuery实现鼠标拖动元素移动位置(源码+注释)
明子健
jqueryjs源码拖动鼠标
欢迎讨论指正!
print.html代码:
<!DOCTYPE html>
<html>
<head>
<meta http-equiv=Content-Type content="text/html;charset=utf-8">
<title>发票打印</title>
&l
- Postgresql 连表更新字段语法 update
qifeifei
PostgreSQL
下面这段sql本来目的是想更新条件下的数据,可是这段sql却更新了整个表的数据。sql如下:
UPDATE tops_visa.visa_order
SET op_audit_abort_pass_date = now()
FROM
tops_visa.visa_order as t1
INNER JOIN tops_visa.visa_visitor as t2
ON t1.
- 将redis,memcache结合使用的方案?
tcrct
rediscache
公司架构上使用了阿里云的服务,由于阿里的kvstore收费相当高,打算自建,自建后就需要自己维护,所以就有了一个想法,针对kvstore(redis)及ocs(memcache)的特点,想自己开发一个cache层,将需要用到list,set,map等redis方法的继续使用redis来完成,将整条记录放在memcache下,即findbyid,save等时就memcache,其它就对应使用redi
- 开发中遇到的诡异的bug
wudixiaotie
bug
今天我们服务器组遇到个问题:
我们的服务是从Kafka里面取出数据,然后把offset存储到ssdb中,每个topic和partition都对应ssdb中不同的key,服务启动之后,每次kafka数据更新我们这边收到消息,然后存储之后就发现ssdb的值偶尔是-2,这就奇怪了,最开始我们是在代码中打印存储的日志,发现没什么问题,后来去查看ssdb的日志,才发现里面每次set的时候都会对同一个key