具有平滑正曲线边界的一般凸体的精确闭式闵可夫斯基研究(Matlab代码实现)
个人主页:研学社的博客
欢迎来到本博客❤️❤️
博主优势:博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
本文目录如下:
目录
1 概述
2 运行结果
3 Matlab代码实现
4 参考文献

1 概述
欧几里得空间的闭式参数公式,边界是平滑的,并且每个点都有正截面曲率。在这些条件下,每个边界点的位置与表面法线之间存在唯一的关系。
主要结果表示为两个定理:
- 定理 1(文章中的定理 4.1):使用每个表面点的单位法向量直接参数化闵可夫斯基和。虽然在数学上表达起来很简单,但这种参数化并不总是实用的计算方式;
- 定理 2(文章中的定理 4.3):使用未归一化的梯度推导出一个更有用的参数闭式表达式。
在两个椭球体的特殊情况下,建议的表达式与以前使用几何解释导出的表达式相同。为了检验结果,对两个超二次体之间的闵可夫斯基和进行了数值验证和比较。
讨论并演示了两种应用:
- 在运动规划问题中产生配置空间障碍;
- 提高基于优化的碰撞检测算法的性能。
2 运行结果

这里仅展现部分运行结果。
部分代码:
close all; clear; clc;
add_paths();
% Robot
N_vtx = 50;
robot = SuperEllipse([5*rand, 3*rand, rand, 0, 0, 0, pi*rand, N_vtx]);
robot_config = [robot.a, robot.eps, robot.tc', robot.ang];
% Generate environment
N = [1,10,50,200,500,1e3,5e3,1e4];
% N = [1,10,50,200,500];
N_ang = 50;
c_obs = cell(1,length(N));
obstacle = cell(1,length(N));
obs_config = cell(1,length(N));
run_time = zeros(1,length(N));
%% Main routine
disp('****************************************************************')
disp('Application on configuration-space obstacle generations in SE(2)')
disp('****************************************************************')
for i = 1:length(N)
disp(['Number of obstacles: ', num2str(N(i))])
[obstacle{i}, obs_config{i}] = generate_obstacle(N(i));
% Minkowski sums
mink = cell(N(i), N_ang);
ti = tic;
for k = 1:N_ang
robot_ang = (k-1)*pi/N_ang;
for j = 1:N(i)
minkObj = MinkSumClosedForm(robot, obstacle{i}{j},...
rot2(robot_ang), rot2(obstacle{i}{j}.ang));
m1 = robot.GetGradients();
mink{j,k} = minkObj.GetMinkSumFromGradient(m1) +...
obstacle{i}{j}.tc;
end
end
run_time(i) = toc(ti);
c_obs{i} = mink;
end
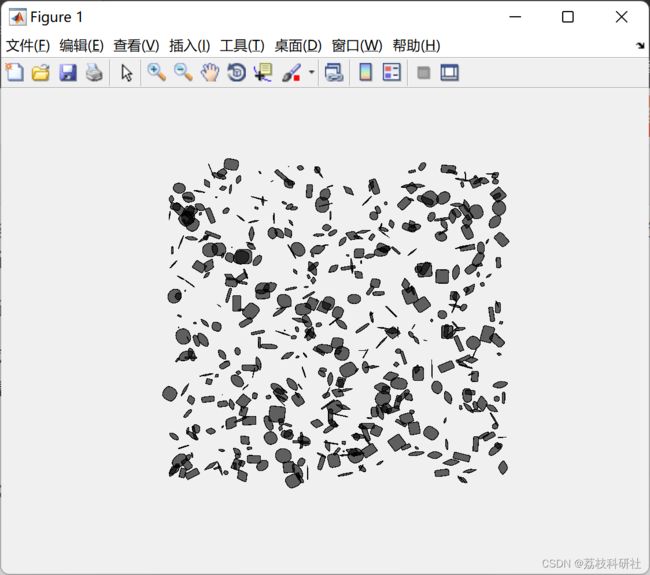
%% Plots
figure; hold on; grid on; axis off;
idx = 5;
bd = 220;
for i = 1:N(idx)
% obstacles in workspace
obstacle = SuperEllipse([obs_config{idx}(i,1:3), 0,...
obs_config{idx}(i,4:end), N_vtx]);
obstacle.PlotShape('k');
end
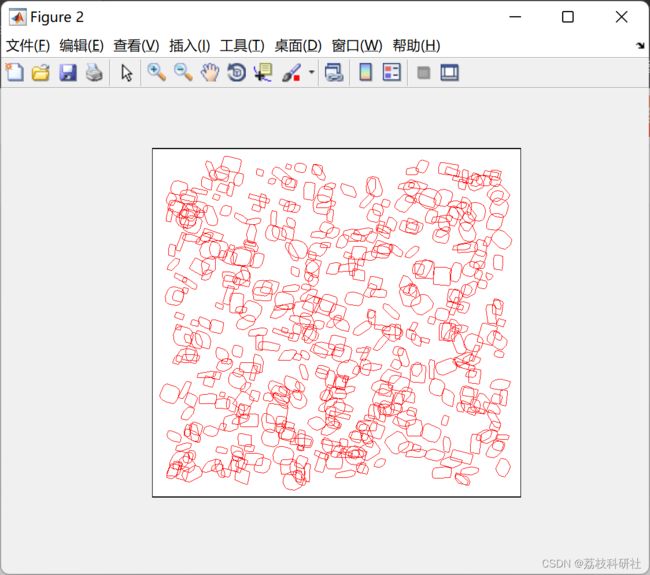
figure; hold on; grid on; axis off;
for i = 1:N(idx)
% obstacles in workspace
obstacle = SuperEllipse([obs_config{idx}(i,1:3), 0,...
obs_config{idx}(i,4:end), N_vtx]);
obstacle.PlotShape('k');
for k = 1:5:N_ang
% c-obstacles
robot_ang = (k-1)*pi/N_ang;
plot3(c_obs{idx}{i,k}(1,:), c_obs{idx}{i,k}(2,:),...
robot_ang*ones(1,50), 'r-', 'LineWidth', 0.1)
% arena boundary
arena = [[-bd;-bd;robot_ang], [-bd;bd;robot_ang],...
[bd;bd;robot_ang], [bd;-bd;robot_ang]];
patch(arena(1,:), arena(2,:), arena(3,:), 'w')
end
end
xlabel('x')
ylabel('y')
zlabel('\theta')
figure; hold on;
plot(N, run_time);
%% Subroutine for generate N random obstacles
function [obstacle, obs_config] = generate_obstacle(N)
obs_a = 10*rand(2,N);
obs_eps = 2 * rand(1,N);
obs_taper = zeros(1,N);
obs_tx = 200 * (2*rand(2,N)-1);
obs_th = pi * rand(1,N);
obstacle = cell(1,N);
for i = 1:N
obstacle{i} = SuperEllipse([obs_a(:,i)', obs_eps(i), obs_taper(i),...
obs_tx(1,i), obs_tx(2,i), obs_th(i), 50]);
end
obs_config = [obs_a; obs_eps; obs_tx; obs_th]';
end
3 Matlab代码实现
4 参考文献
部分理论来源于网络,如有侵权请联系删除。
[1]Ruan, S. and Chirikjian, G.S., 2021. Closed-Form Minkowski Sums of Convex Bodies with Smooth Positively Curved Boundaries. Computer-Aided Design, p.103133.