233搞懂HMM(隐马尔可夫)
文章目录
- 2条性质
- 3个参数
- 3个问题
-
- 维特比算法
- 参考资料
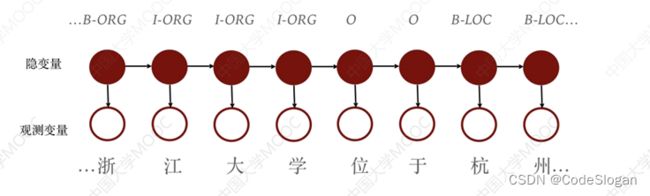
有向图模型,主要用于时序数据建模,在语音识别,自然语言处理等领域,以及在知识图谱命名实体识别中的序列标注,有广泛应用。
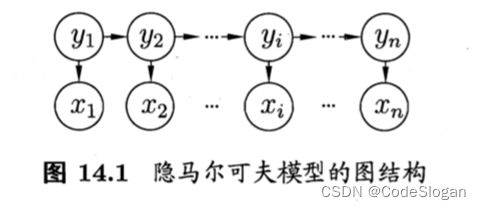
2条性质
马尔可夫链性质:
t时刻的状态变量y只由t-1时刻的状态决定,而与t-2及之前的无关t时刻的观测变量仅由t时刻的状态变量决定
3个参数
- 状态转移概率矩阵:
为NxN的矩阵,矩阵里的每个值记录从当前状态转移到其它状态的概率 - 输出观测概率矩阵:
为NxM的矩阵,M为观测值结果的个数
矩阵记录从当前状态到每一个观测值的概率 - 初始状态概率
在t=1初始时刻,各状态出现的概率。
给定隐马尔可夫模型 λ \mathbf{\lambda} λ,生成观测序列的过程:
- 设置t=1,根据初始状态概率参数,选择初始状态
- 根据输出观测概率矩阵,得出当前状态变量的观测变量
- 根据状态转移概率矩阵,得出当前状态变量的下一个状态变量
- 重复2-3过程,直到结束
3个问题
-
概率计算问题。给定模型 λ = ( A , B , π ) \lambda=\left(A,B,\pi\right) λ=(A,B,π)和观测序列 O = o 1 , o 2 , … , o T O=o_1,o_2,…,o_T O=o1,o2,…,oT,计算在模型 λ \lambda λ下观测序列 O O O出现的概率 P ( O | λ ) P\left(O\middle|\lambda\right) P(O∣λ)。前向-后向算法是通过递推地计算前向-后向概率可以高效地进行隐马尔可夫模型的概率计算。
-
学习问题。已知观测序列 O = o 1 , o 2 , … , o T O=o_1,o_2,…,o_T O=o1,o2,…,oT,估计模型 λ = ( A , B , π ) \lambda=\left(A,B,\pi\right) λ=(A,B,π)参数,使得在该模型下观测序列概率 P ( O | λ ) P\left(O\middle|\lambda\right) P(O∣λ)最大。即用极大似然估计的方法估计参数。EM算法可以高效地对隐马尔可夫模型进行训练。它是一种非监督学习算法。
-
预测问题。已知模型 λ = ( A , B , π ) \lambda=\left(A,B,\pi\right) λ=(A,B,π)和观测序列 O = o 1 , o 2 , … , o T O=o_1,o_2,…,o_T O=o1,o2,…,oT,求对给定观测序列条件概率 P ( I | O ) P\left(I\middle| O\right) P(I∣O)最大的状态序列 I = i 1 , i 2 , … , i T I=i_1,i_2,…,i_T I=i1,i2,…,iT。维特比算法应用动态规划高效地求解最优路径,即概率最大的状态序列。
维特比算法
输入:HMM模型参数,观测序列
输出:状态序列
算法流程:
时刻由观测序列长度决定
δ \delta δ用于记录每一时刻各状态的概率
ψ \psi ψ用于记录前一个时刻的状态,便于回溯
- 初始化, δ \delta δ和 ψ \psi ψ, ψ \psi ψ置为0
- 递归(动态规则,状态转移矩阵),
现有t-1时刻,各状态出现的概率。
根据状态转移矩阵,分别计算其转移到各个状态的概率,取最大值乘以输出观测概率 - 取累乘概率的最大值,并进行回溯,得到状态序列
class HiddenMarkov:
def __self__(self):
self.alphas = None
self.forward_P = None
self.betas = None
self.backward_P = None
def viterbi(self, Q, V, A, B, O, PI):
# 状态集合的大小
N = len(Q)
# 观测序列的大小
M = len(O)
deltas = np.zeros((N, M))
psi = np.zeros((N, M))
I = np.zeros((1, M))
# 遍历预测序列,即遍历全部时刻
for t in range(M):
# 得到这个观测序列值在观测集合里的索引
idxO= V.index(O[t])
# 每一个时刻遍历所有状态
for i in range(N):
if t == 0:
deltas[i][t] = PI[0][i] * B[i][idxO]
psi[i][t] = 0
else:
# t-1时刻所有的状态 与 转移到第i个状态的概率 对应相乘取最大值
# 再与输出预测相乘
deltas[i][t] = np.max(
np.multiply([delta[t-1] for delta in deltas], [a[i] for a in A])) * B[i][idxO]
psi[i][t] = np.argmax(
np.multiply([delta[t-1] for delta in deltas], [a[i] for a in A]))
# 得到最后一时刻的最大概率的下标
I[0][M-1] = np.argmax([delta[M-1] for delta in deltas])
# 由后向前递归得到其它结点
for t in range(M - 2, -1, -1):
I[0][t] = psi[int(I[0][t+1])][t+1]
# 输出最优路径
print('最优路径是:', "->".join([str(int(i + 1)) for i in I[0]]))
Q = [1, 2, 3] # 状态序列
V = ['红', '白']
A = [[0.5, 0.2, 0.3], [0.3, 0.5, 0.2], [0.2, 0.3, 0.5]] # 状态转移
B = [[0.5, 0.5], [0.4, 0.6], [0.7, 0.3]] # 输出观测
O = ['红', '白', '红'] # 观测序列
PI = [[0.2, 0.4, 0.4]] # 初始概率分布
HMM = HiddenMarkov()
HMM.viterbi(Q, V, A, B, O, PI)
参考资料
- 《机器学习》周志华
- 《统计学习方法》李航
- 统计学习方法代码实现