0210更新【论文阅读目录】
不那么正经的目录
- 最近更新:
- Introduction - 萌生 从0开始
- 【01】End to End Learning for Self-Driving Cars - Literature review 1
- 【02】DSDNet Deep Structured self-Driving Network - Literature review 2
- 【03】Motion Planning through policy search
- 【04】PRM-RL Long-range Robotic Navigation Tasks by Combining Reinforcement Learning and Sampling-based Planning
- 【05】Socially aware motion planning with deep reinforcement learning-annotated
- 【06】A Survey on Policy Search Algorithms for Learning Robot Controllers in a Handful of Trials
- 21/07/13 中途插播
- 【07】 Optimal Trajectory Generation for Dynamic Street Scenarios in a Frenet Frame
- 【08】 Learning by Cheating
- 【09】Learning to drive from a world on rails
- 【10】The Dynamic Window Approach to Collision Avoidance
- 【11】Safe Trajectory Generation for Complex Urban Environments Using Spatio-temporal Semantic Corridor
- 【12】Efficient Uncertainty-aware Decision-making for Autonomous Vehicles Using Guided
- 【13】Optimization-Based Collision Avoidance
- 【14】 Multi-Modal Fusion Transformer for End-to-End Autonomous Driving
- 【15】 Can Autonomous Vehicles Identify, Recover From, and Adapt to Distribution Shifts?
- 【16】 Pylot: A Modular Platform for Exploring Latency-Accuracy Tradeoffs in Autonomous Vehicles
- 【17】End-to-End Model-Free Reinforcement Learning for Urban Driving Using Implicit Affordances
- 【18】GRI: General Reinforced Imitation and its Application to Vision-Based Autonomous Driving
- 【19】Exploring the Limitations of Behavior Cloning for Autonomous Driving
- 【20】Can Autonomous Vehicles Identify, Recover From, and Adapt to Distribution Shifts?
- 系列完结撒花!
前言唠一唠:
2022/1: 好像马上就要20篇了 完成这个2020年8月的愿望了,其实在自己的notion上 已经超过了20了把 有些没有一并分享出来,但是我一直觉得知识应该开源 尽管这样在前期 得不到反馈的时候 会很累 就像当初做字幕一样 做着做着 太累了… 然而后面看到b站点赞和收藏 好像有了动力确没了热情 hhhh
2021/9:步入第二年了,然而还没有什么自己的进度 还在疯狂汲取巨人们的成功,尝试先爬上肩膀
2020/8:MPhil 研究型硕士第一年(HKUST),导师方向 无人驾驶 所以就大方向早早确定
中方向自己很想做: Self-Driving End-to-End 端到端的输入输出,但是和师兄聊天得知这个领域很难在现实中实现(毕竟这种无知内部的输出开车撞人了咋办) 但是还是想先闯一番,独自一人探索中,那么第一步就开始了 -> 文献综述 Literature review 这个系列可能不止一个方向,motion planning, fusion什么的可能都会仔细看一点
其中很多解释文字,可能不尽人意甚至是有误导,请各位大佬看的时候觉得不对的,留个言,我会定期改正自己的文字与想法(毕竟我说出来的都成我的认知了),从开始可能中英分开,中间中英夹杂可能部分人不适应,再到后面可能英文的解释越多(没办法毕竟后面写也得英文… 博客就当一遍写一遍理解练习?) 唠完了 那么走
然后最新 又回到传统方案了 所以后面传统不急于深度学习的会多一点,务实…
最近更新:
- 2022/01/16:更新GRI一文,也是leaderboard上的 arxiv 刷的时候刷到了 就看了看 感觉框架想法不错
- 2021/12/31:添加MaRLn一文,基本在刷carla leaderboard上开源和有论文的所有文章 看看想法
- 2021/12/13:添加transfuser一文,快到20篇了,最近又回到学习了hhhh 主要是传统emmm 我看不到搞头,看了一下 算是给毕业论文当综述了,学习还是比较好玩 虽然都是那几个网络,但是总会有耳目一新的hhh
- 2021/1122:添加OBCA方案,用凸优化做的碰撞检测问题,然后有julia源码,apollo也用这个实现了TDR-OBCA,后面再看看这篇对着apollo代码看看 毕竟julia不能上车…
- 2021/0906:新添加了DWA、沈老师团队的两篇论文,但是还没看完代码,等待整理完,快了快了,20篇冲啊!
- 2021/803:添加了world on rails一文,对这个作者佩服的五体投地!
友情参考:博客园主页:https://www.cnblogs.com/kin-zhang
Introduction - 萌生 从0开始
因为传统的驾驶步骤应该是:!首先具备躲避能力,再次基础上搭传感器!【1.感知】然后就是去建图【2.建图】当你有了一幅地图,你才能开始导航 -> 做规划,这里分对于路径的规划与对于车辆的运动控制规划,路径的就是类似于寻路问题?运动控制就是这个路径上我怎么走,怎么沿着他走,怎么转弯?【3.路径规划】【4.控制规划】
然后在这个传统上我们已经能看见最明显的问题了,也就是这个路径上我怎么走,方向盘打多少?油门推多少?包括每一个动作可能也要单独设计,比如转弯 左转右转的大小,不同大小道的掉头,是不是也会导致掉头的参数不一致?
所以 end-to-end self-driving 萌生了!end-to-end是什么?端到端——也就是类似于用神经网络【这个词不高大上,在你听完吴恩达系列的时候 他只是一种解决问题的工具,还是那种最懒的 什么都让电脑自己学去吧,只要神经元够多,我就不怕,这也是为什么神经网络很早就提出了但是迟迟没有得到发展】打个比方——一张图,我要识别这是猫是狗?emm 对于我们人来说我们也是经过小时候才知道哦!这是狗,这是猫,没有啥难度,对电脑来说 它们是一堆数据,一堆像素点,像素点上有RGB三个的大小,端到端就类似于我去学,一大堆权重,0/1告诉我,这个像素点对于识别猫狗的准确率?【我感觉我没表达清 有点带偏了?】 好吧 我放弃了 大家转到3Blue1Brown的介绍好了 hhhh
那么接下来就是这咋用在自动驾驶呢?hhh 当你能识别猫狗的时候,假设一张图你识别的是左转右转操作(当然还有停车踩油门操作)是不是悟了,说着简单是因为我只引入了一个也就是图!假设传感器的输入就是一张图!例如89年CMU的这一篇: 从这里萌生——第零篇
[0] Pomerleau, Dean A. Alvinn: An autonomous land vehicle in a neural network[J]. Advances in neural information processing systems. 1989: 305-313.
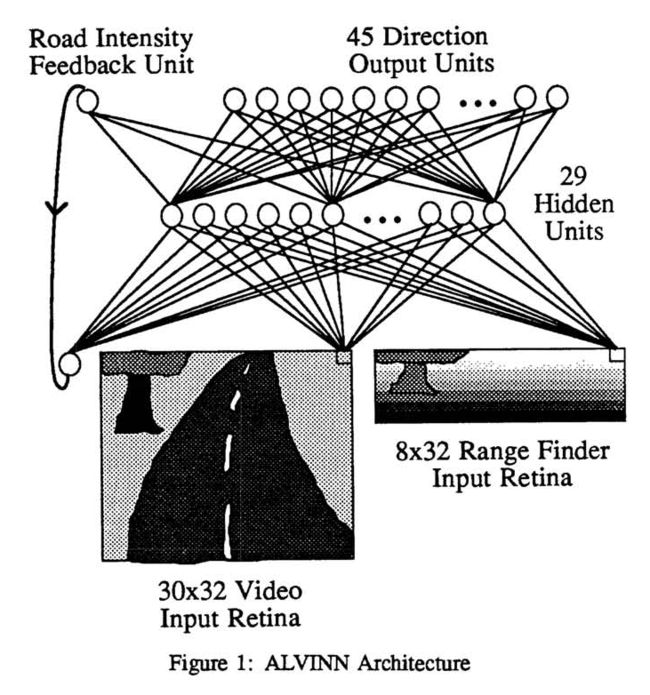
实不相瞒,其实这是我本科毕业要翻译的论文,但是赶工期,所以基本google了,我尽量把摘要部分翻的 人能看懂的程度了:
ALVINN(基于神经网络中的自动驾驶汽车)是专为道路跟踪任务而设计的3层反向传播网络,通过输入从摄像机和激光测距仪获取的图像,输出车辆应遵循的行驶方向来驾驶汽车。并且它能够使用模拟仿真道路图像进行训练。卡内基·梅隆大学设计的自主导航测试车上的测试表明,该系统在某些野外条件下能够精确地沿着真实道路行驶。此外,这种新的自适应异常的自主导航系统在每种不同条件下训练时,会输出专门的行驶方案。它能够根据当前条件选择最合适的方案,输出正确的转向方向。
花了十几分钟 尝试去讲表述一个自己想要尝试的方向?引用一位毕业的从事科研的哥告诉我的:如果你想要了解某个方向,搜集至少200篇有关论文,写出一篇综述。这样,你不仅了解了这个方向,同样也有了一篇小论文。【多读论文才是研究生入门的基本途径】
再加上英语课要开始 -> academic writing,那么正式进入文献综述啦,(希望我写着写着不会半途而废,200篇不可能了,20篇 我尝试一下)
【01】End to End Learning for Self-Driving Cars - Literature review 1
转至博客园:【论文阅读】End to End Learning for Self-Driving Cars
【02】DSDNet Deep Structured self-Driving Network - Literature review 2
转至博客园:【论文阅读】DSDNet Deep Structured self-Driving Network
【03】Motion Planning through policy search
【论文阅读】Motion Planning through policy search
【04】PRM-RL Long-range Robotic Navigation Tasks by Combining Reinforcement Learning and Sampling-based Planning
【论文阅读】PRM-RL Long-range Robotic Navigation Tasks by Combining Reinforcement Learning and Sampling-based Planning
【05】Socially aware motion planning with deep reinforcement learning-annotated
【论文阅读】Socially aware motion planning with deep reinforcement learning-annotated
正在进行中,年前看的一直看一半没看了…
不过从这里开始后面估计会很频繁阅读,因为有压力下了,这时候可能不会再精读细读了而是摘要过一下?
但愿这个系列还能坚持到20篇的
【06】A Survey on Policy Search Algorithms for Learning Robot Controllers in a Handful of Trials
这篇是TRO的文献综述版,当初我读的时候很多基础知识都没有补充足,最近再看的时候(没错这篇论文我读了3遍 断断续续 打工人啊)觉得 TQL!!! 但是我至今还没有整理完,感觉后面越看越知道了怎么样看论文哎(但是一篇还是要好久好久 主要是套娃严重)
正在进行中
21/07/13 中途插播
2021/07/13: 一直以来,很嫌弃cnblogs的默认主题,然后今天我发现了原来Github上有超多开源的主题,然后我又好了,其实时至今日,应该阅读有20篇了 只是记录很多时候都随随意意的写,比如在ipad手写,notion随便几笔,这样,这几天一直在review 大佬的论文,学到了好多东西!然后自己的想法也开始完善起来了
后面有写其他的论文,但是很多时候写的时候加了自己的想法,所以论文还没发之前估计不会提前发布文章(notion)
对了后面其实我也找到了超爽的notion,csdn开始被我嫌弃了,但是又没被我嫌弃,主要是csdn搜索引擎太好了,就是可以直接搜索到,相对比于cnblog 博客园新文章就很难被搜到,再加上我写的时候一直在看怎么调目录出来,现在好了 主题解决了;但是吧 CSDN广告有点多,所以就在这边做总结,那边发布好了…
贴一下博客园主页吧:https://www.cnblogs.com/kin-zhang
然后是关于找到的博客园主题:https://github.com/BNDong/Cnblogs-Theme-SimpleMemory
文档超棒,非常简单的设置 超nice!!!
【07】 Optimal Trajectory Generation for Dynamic Street Scenarios in a Frenet Frame
这篇其实在CSDN上也发了 因为随着源码,所以也一起放在CSDN上了,但是其实notion外链是最好看的… 因为是在那上面写的,导出markdown多多少少有些问题(但比知乎连公式都显示不全可好太多了!)
- CSDN:https://blog.csdn.net/qq_39537898/article/details/118515386
- 无广告博客园版:https://www.cnblogs.com/kin-zhang/p/15006838.html
- 最终级美观 notion外链版
但是还是麻烦给个赞什么的(CSDN/博客园),因为notion外链emmm 看不到观看的,虽然说是笔记,但是总是希望能看到一起学习的人儿统计感觉更棒
【08】 Learning by Cheating
正在进行中,已完成一部分,感觉挺棒的想法
【09】Learning to drive from a world on rails
上一篇同出一个作者,正在进行中,已完成一部分,不得不佩服这个作者真牛皮
- 无广告博客园版:https://www.cnblogs.com/kin-zhang/p/15094246.html
- 最终极美观 notion外联版 因为这个加了自己杂七杂八的想法 所以暂时先不发链接了
【10】The Dynamic Window Approach to Collision Avoidance
这篇其实本科做毕设的时候就看过,但是当时基本是匆匆调库,并没有深入论文去一行行对着代码看,这次正好有机会了 重温一下,顺便试一下直接拿markdown做的笔记,所以格式什么的在CSDN和博客园都很优美 hhhh
- 无广告博客园版:https://www.cnblogs.com/kin-zhang/p/15211490.html
- CSDN:https://blog.csdn.net/qq_39537898/article/details/120023511
【11】Safe Trajectory Generation for Complex Urban Environments Using Spatio-temporal Semantic Corridor
看完了但是还没有对着源码看,其中有些问题,阿冰哥也帮忙做出了解答,就是直接约束求解那块还得看看代码的具体实现步骤,不然总觉得不得要领
要不后面先把 论文部分放上来
【12】Efficient Uncertainty-aware Decision-making for Autonomous Vehicles Using Guided
和上面那一篇同出沈老师的团队,打算看还没开始,最近还在整理杰哥的杰作思路和对代码。
其他项目上的杂事也很多 emmm 时不时就会有点累 emmm
【13】Optimization-Based Collision Avoidance
- 无广告博客园版:https://www.cnblogs.com/kin-zhang/p/15591088.html
- CSDN:https://blog.csdn.net/qq_39537898/article/details/121483647
【14】 Multi-Modal Fusion Transformer for End-to-End Autonomous Driving
- 无广告博客园版:https://www.cnblogs.com/kin-zhang/articles/15685464.html
- 站内版本:https://blog.csdn.net/qq_39537898/article/details/121915792
【15】 Can Autonomous Vehicles Identify, Recover From, and Adapt to Distribution Shifts?
已写完 秉承着 一周一篇更新速度把
- xx
- xx
【16】 Pylot: A Modular Platform for Exploring Latency-Accuracy Tradeoffs in Autonomous Vehicles
- 无广告博客园版:https://www.cnblogs.com/kin-zhang/p/15708239.html
- 站内版本:https://blog.csdn.net/qq_39537898/article/details/122027970
【17】End-to-End Model-Free Reinforcement Learning for Urban Driving Using Implicit Affordances
- 无广告博客园版:https://www.cnblogs.com/kin-zhang/p/15754221.html
- 站内版本:https://blog.csdn.net/qq_39537898/article/details/122261368
【18】GRI: General Reinforced Imitation and its Application to Vision-Based Autonomous Driving
- 无广告博客园版:https://www.cnblogs.com/kin-zhang/p/15811714.html
- 站内版本:https://blog.csdn.net/qq_39537898/article/details/122261368
【19】Exploring the Limitations of Behavior Cloning for Autonomous Driving
- 无广告博客园版:https://www.cnblogs.com/kin-zhang/p/15830742.html
- 站内版本:https://blog.csdn.net/qq_39537898/article/details/122624089
【20】Can Autonomous Vehicles Identify, Recover From, and Adapt to Distribution Shifts?
- 无广告博客园版:https://www.cnblogs.com/kin-zhang/p/15879803.html
- 站内版本:https://blog.csdn.net/qq_39537898/article/details/122864017
系列完结撒花!
2022/02/10 最近太忙了… 后面再留感想