动态系统的建模与分析
参考:DR_CAN
相同领域的文章:
- 动态系统的建模与分析
- 自动控制原理
- Advanced控制理论
- 傅里叶级数与变换
- 工程数学
文章目录
-
- 1.介绍
- 2.电路系统建模
- 3.流体系统建模
- 4.拉普拉斯变换
- 5.拉普拉斯变换的收敛域(ROC)与逆变换(ILT)
- 6.拉&传&微的关系
- 7.一阶系统的单位阶跃响应
- 8.频率响应与滤波器
- 9.一阶系统的频率响应
- 10.二阶系统对初始条件的动态响应
- 11.二阶系统的单位阶跃响应
- 12.二阶系统的性能分析与比较
- 13.二阶系统频率响应分析
- 14.伯德图
1.介绍
解决一个控制系统的问题:
- 对研究对象进行分析
- 控制器设计
- 测试
分析被控对象的物理特性及动态表现,在这个基础上建立数学模型,数学模型可以是动力学模型、热力学模型、流体力学模型和经济学模型等,然后在数学模型的基础上进行控制器的设计,为满足不同的要求就要应用不同的控制方法(传统控制控制、PID控制、非线性控制、自适应控制和优化控制等),紧接着选择测试平台,可以是仿真平台、实验室模型样机和真实设备等。最后不断将实验结果与模型比较,对数学模型不断的验证和更新。
涉及的内容:
动态系统建模:
- 电力,KCL,KVL
- 流体
- 热力学
- 机械系统
拉普拉斯+微分方程
时域分析
频域分析
2.电路系统建模
基础元件:
| 基础元件 | 单位 | 符号 |
|---|---|---|
| 电量 | 库仑(c) | q q q |
| 电流 | 安培(A) | i i i |
| 电压 | 伏特(V) | e e e |
| 电阻 | 欧姆(Ω) | R R R |
| 电容 | 法拉(F) | C C C |
| 电感 | 亨利(H) | L L L |
流速: i = d q d t i=\frac{dq}{dt} i=dtdq
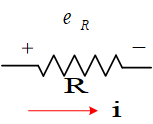
电阻电压: e R = i R e_R=iR eR=iR
电量: q = C e c q=Ce_c q=Cec
e c = 1 C q = 1 C ∫ 0 t i d t e_c=\frac{1}{C}q=\frac{1}{C}\int_0^tidt ec=C1q=C1∫0tidt

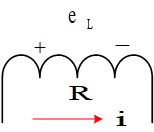
电感:
e L = L d i d t = L i ′ e_L=L\frac{di}{dt}=Li^{\prime} eL=Ldtdi=Li′
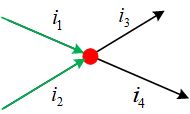
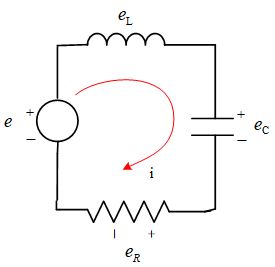
基尔霍夫定律
KCL:所有进入某节点的电流的总和等于所有离开这个节点的电流的总和。
i 1 + i 2 − i 3 − i 4 = 0 i_1+i_2-i_3-i_4=0 i1+i2−i3−i4=0
KVL:沿着闭合回路所有元件两端的电压的代数和为零。
e R − e = 0 e_R-e=0 eR−e=0

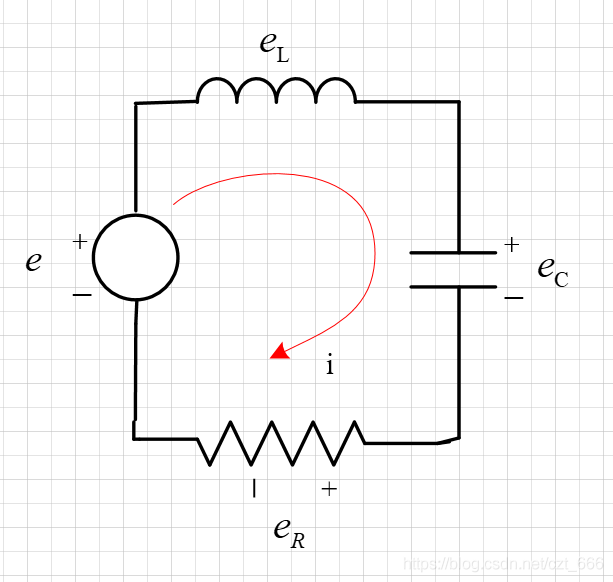
KVL:
e L + e C + e R − e = 0 e_L+e_C+e_R-e=0 eL+eC+eR−e=0
L i ′ + 1 C ∫ 0 t i d t + i R = e Li^{\prime}+\frac{1}{C}\int_0^tidt+iR=e Li′+C1∫0tidt+iR=e
两边求导:
L i ′ ′ + i ′ R + 1 C i = e ′ Li^{\prime\prime}+i^{\prime}R+\frac{1}{C}i=e^{\prime} Li′′+i′R+C1i=e′
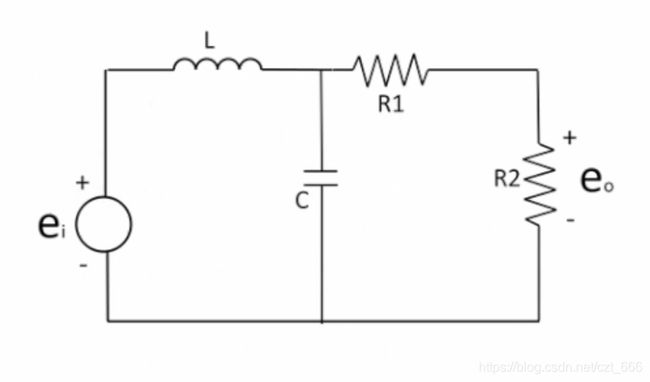
L = 2 H C = 1 4 F R 1 = 1 Ω R 2 = 3 Ω L=2H \\C=\frac{1}{4}F\\ R_1=1\Omega\\ R_2=3\Omega L=2HC=41FR1=1ΩR2=3Ω
loop 1:
e L + e C − e i = 0 e_L+e_C-e_i=0 eL+eC−ei=0
loop 2:
e R 1 + e R 2 − e C = 0 e_{R1}+e_{R2}-e_C=0 eR1+eR2−eC=0
合并:
e L + e R 1 + e R 2 − e i = 0 e_L+e_{R1}+e_{R2}-e_i=0 eL+eR1+eR2−ei=0
这是一个大圈,因此在用KVL时,不一定都用小圈,也可用大圈。
e L = L i 1 ′ = 2 i 1 ′ e_L=Li_1^{\prime}=2i_1^{\prime} eL=Li1′=2i1′
e C = 1 C ∫ 0 t ( i 1 − i 2 ) d t = 4 ∫ 0 t ( i 1 − i 2 ) d t e_C=\frac{1}{C}\int_0^t (i_1-i_2) dt=4\int_0^t (i_1-i_2) dt eC=C1∫0t(i1−i2)dt=4∫0t(i1−i2)dt
e R 1 = i 2 R 1 = i 2 e_{R1}=i_2R_1=i_2 eR1=i2R1=i2
e R 1 = i 2 R 2 = 3 i 2 e_{R1}=i_2R_2=3i_2 eR1=i2R2=3i2
loop 1:
2 L i 1 ′ + 4 ∫ 0 t ( i 1 − i 2 ) d t − e i = 0 (1) 2Li_1^{\prime}+4\int_0^t (i_1-i_2) dt-e_i=0\tag{1} 2Li1′+4∫0t(i1−i2)dt−ei=0(1)
loop 2:
4 i 2 − 4 ∫ 0 t ( i 1 − i 2 ) d t = 0 (2) 4i_2-4\int_0^t (i_1-i_2) dt=0\tag{2} 4i2−4∫0t(i1−i2)dt=0(2)
由(1)(2)式得:
2 i 1 ′ + 4 i 2 − e i = 0 (3) 2i_1^{\prime}+4i_2-e_i=0\tag{3} 2i1′+4i2−ei=0(3)
由(2)得:
i 2 ′ = i 1 − i 2 i 2 ′ ′ = i 1 ′ − i 2 ′ (4) i_2^{\prime}=i_1-i_2\\ i_2^{\prime\prime}=i_1^{\prime}-i_2^{\prime} \tag{4} i2′=i1−i2i2′′=i1′−i2′(4)
由(3)(4)式得:
2 ( i 2 ′ ′ + i 2 ′ ) + 4 i 2 = e i (5) 2(i_2^{\prime\prime}+i_2^{\prime})+4i_2=e_i\tag{5} 2(i2′′+i2′)+4i2=ei(5)
求 e o e_o eo和 e i e_i ei的关系:
e o = e R = 3 i 2 (6) e_o=e_R=3i_2\tag{6} eo=eR=3i2(6)
由(5)(6)式得:
2 ( e o ′ ′ + e o ′ ) + 4 e o = 3 e i 2(e_o^{\prime\prime}+e_o^{\prime})+4e_o=3e_i 2(eo′′+eo′)+4eo=3ei
小结:
KVL列方程,然后消掉自己定义的电流
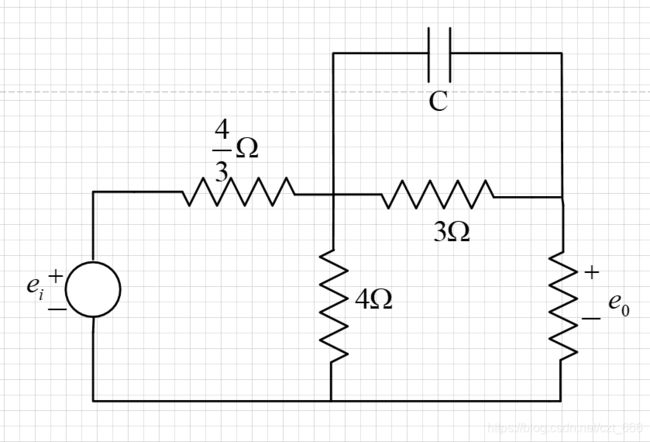
loop 1:
i 1 R 1 + ( i 1 − i 2 ) R 2 − e i = 0 16 3 i 1 − 4 i 2 − e i = 0 (1) i_1R1+(i_1-i_2)R2-e_i=0\\ \frac{16}{3}i_1-4i_2-e_i=0\tag{1} i1R1+(i1−i2)R2−ei=0316i1−4i2−ei=0(1)
loop 2:
( i 2 − i 3 ) R 3 + i 2 R 4 − ( i 1 − i 2 ) R 2 = 0 − 4 i 1 + 9 i 2 − 3 i 3 = 0 (2) (i_2-i_3)R3+i_2R4-(i_1-i_2)R2=0\\ -4i_1+9i_2-3i_3=0\tag{2} (i2−i3)R3+i2R4−(i1−i2)R2=0−4i1+9i2−3i3=0(2)
loop 3:
1 C ∫ 0 t i 3 d t − ( i 2 − i 3 ) R 3 = 0 i 3 = 3 C ( i 2 ′ − i 3 ′ ) (3) \frac{1}{C}\int_0^t i_3 dt-(i_2-i_3)R3=0\\ i_3=3C(i_2^{\prime}-i_3^{\prime})\tag{3} C1∫0ti3dt−(i2−i3)R3=0i3=3C(i2′−i3′)(3)
我们的目的是找到 e i e_i ei和 e o e_o eo的关系,而 e o = 2 i 2 e_o=2i_2 eo=2i2,因此想先消去 i 1 i_1 i1和 i 3 i_3 i3,再消去 i 2 i_2 i2
由(1)(2)式得:
− 4 ( 3 4 i 2 + 3 16 e i ) + 9 i 2 − 3 i 3 = 0 2 i 2 − i 3 − 1 4 e i = 0 (4) -4(\frac{3}{4}i_2+\frac{3}{16}e_i)+9i_2-3i_3=0\\ 2i_2-i_3-\frac{1}{4}e_i=0\tag{4} −4(43i2+163ei)+9i2−3i3=02i2−i3−41ei=0(4)
由(3)(4)式得:
2 i 2 − 3 C ( i 2 ′ − i 3 ′ ) − 1 4 e i = 0 (5) 2i_2-3C(i_2^{\prime}-i_3^{\prime})-\frac{1}{4}e_i=0\tag{5} 2i2−3C(i2′−i3′)−41ei=0(5)
(5)式还有 i 3 ′ i_3^{\prime} i3′没消去,为了不引入新的变量,对(4)式求导:
2 i 2 ′ − i 3 ′ − 1 4 e i ′ = 0 (6) 2i_2^{\prime}-i_3^{\prime}-\frac{1}{4}e_i^{\prime}=0\tag{6} 2i2′−i3′−41ei′=0(6)
由(5)(6)式得:
2 i 2 − 3 C ( i 2 ′ − ( 2 i 2 ′ − 1 4 e i ′ ) ) − 1 4 e i = 0 2 i 2 + 3 C i 2 ′ − 3 4 C e i ′ − 1 4 e i = 0 (7) 2i_2-3C(i_2^{\prime}-(2i_2^{\prime}-\frac{1}{4}e_i^{\prime}))-\frac{1}{4}e_i=0\\ 2i_2+3Ci_2^{\prime}-\frac{3}{4}Ce_i^{\prime}-\frac{1}{4}e_i=0\tag{7} 2i2−3C(i2′−(2i2′−41ei′))−41ei=02i2+3Ci2′−43Cei′−41ei=0(7)
只有电流 i 2 i_2 i2,这样就可以引入 e o e_o eo了:
e o + 3 2 C e o ′ = 1 4 e i + 3 4 C e i ′ (8) e_o+\frac{3}{2}Ce_o^{\prime}=\frac{1}{4}e_i+\frac{3}{4}Ce_i^{\prime}\tag{8} eo+23Ceo′=41ei+43Cei′(8)
3.流体系统建模
流体系统的几个基本元素:
此处默认为不可压缩的均质流体
| 密度 | ρ \rho ρ | k g / m 3 kg/m^3 kg/m3 |
|---|---|---|
| 流量flow rate | q q q | m 3 / s m^3/s m3/s |
| 体积 | v | m 3 m^3 m3 |
| 高度hight | h | m |
| 压强pressure | P | N / m 2 N/m^2 N/m2 |
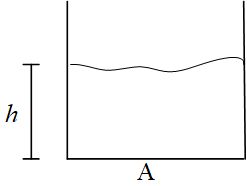
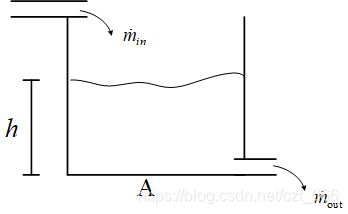
压强有三个概念,比如说对于容器的液体来说,它的高度是 h h h,横截面积是 A A A,由流体重力产生的压强称之为静压(Hydrostatic Pressure):
P H y d r o = F H y d r o A = m g A = ρ V g A = ρ A h g A = ρ g h A = ρ g h \begin{aligned} P_{Hydro} & = \frac{F_{Hydro}}{A} = \frac{mg}{A} = \frac{\rho V g}{A}\\ & = \frac{\rho Ah g}{A} = \frac{\rho g h}{A} = \rho g h \end{aligned} PHydro=AFHydro=Amg=AρVg=AρAhg=Aρgh=ρgh
除了液体的压强以外还有大气压强,绝对压强(Absolute Pressure):
P a b s = P a + P H y d r o = P a + ρ g h P_{abs}=P_a+P_{Hydro}=P_a+ \rho g h Pabs=Pa+PHydro=Pa+ρgh
测量出来的压力称为表压(Gauge Pressure):
P g a u g e = P a b s − P a = ρ g h P_{gauge}=P_{abs}-P_a= \rho g h Pgauge=Pabs−Pa=ρgh
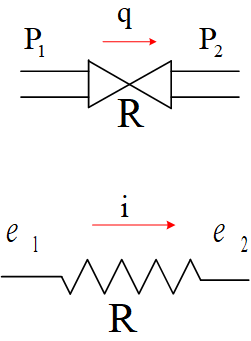
流阻Fluid Resistance
产生流阻的原因是流体在流动的过程中,通过一些管道连接等,这些都会阻碍流体的流动,因此会产生压差,压差和流量相关:
P 1 − P 2 = ρ q R P_1-P_2=\rho q R P1−P2=ρqR
ρ q = k g / m 3 ⋅ m 3 / s = k g / s \rho q=kg/m^3\cdot m^3/s=kg/s ρq=kg/m3⋅m3/s=kg/s:每秒钟通过横截面的流体的质量,两边的压力差越大,每秒钟流过的流体的越多。
流阻和电阻的概念非常相似:
e 1 − e 2 = i R e_1-e_2=i R e1−e2=iR
理想压源
P 2 = P 1 + P s P_2=P_1+P_s P2=P1+Ps

基本法则-质量守恒定律Conseration of Mass
有了基本元素,还需要基本法则把它们联系在一起,就像电路当中有基尔霍夫定律,在力学当中有牛顿定律一样,这里面我们用到的是质量守恒定律,容器内流体质量的变化:
d m d t = m ˙ i n − m ˙ o u t \frac{\mathrm{d} m}{\mathrm{d} t} =\dot{m}_{in}-\dot{m}_{out} dtdm=m˙in−m˙out
式子两边除以 ρ \rho ρ:
d V d t = q ˙ i n − q ˙ o u t \frac{\mathrm{d} V}{\mathrm{d} t} =\dot{q}_{in}-\dot{q}_{out} dtdV=q˙in−q˙out
⇒ A d h d t = q ˙ i n − q ˙ o u t \Rightarrow A\frac{\mathrm{d} h}{\mathrm{d} t} =\dot{q}_{in}-\dot{q}_{out} ⇒Adtdh=q˙in−q˙out
⇒ d h d t = 1 A ( q ˙ i n − q ˙ o u t ) \Rightarrow \frac{\mathrm{d} h}{\mathrm{d} t} =\frac{1}{A}(\dot{q}_{in}-\dot{q}_{out}) ⇒dtdh=A1(q˙in−q˙out)
容器底部受到的压力:
P = P a + ρ g h P=P_a+\rho gh P=Pa+ρgh
其动态方程为:
d P d t = d d t ( P a + ρ g h ) = ρ g d h d t = ρ g A ( q ˙ i n − q ˙ o u t ) \begin{aligned} \frac{\mathrm{d} P}{\mathrm{d} t} &= \frac{\mathrm{d} }{\mathrm{d} t}(P_a+\rho gh)\\ & = \rho g\frac{\mathrm{d} h}{\mathrm{d} t} \\& = \frac{ \rho g}{A}(\dot{q}_{in}-\dot{q}_{out}) \end{aligned} dtdP=dtd(Pa+ρgh)=ρgdtdh=Aρg(q˙in−q˙out)

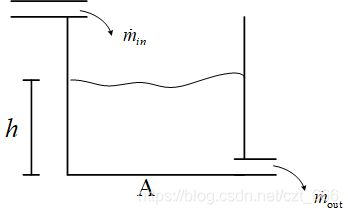
进口处为 q i n q_{in} qin,出口处 q o u t q_{out} qout,容器得横截面积为 A A A,出口流阻为u R R R,求液面高度的动态方程 d h d t \frac{dh}{dt} dtdh.
由质量守恒定律:
d V d t = q ˙ i n − q ˙ o u t \frac{\mathrm{d} V}{\mathrm{d} t} =\dot{q}_{in}-\dot{q}_{out} dtdV=q˙in−q˙out
⇒ d h d t = 1 A ( q ˙ i n − q ˙ o u t ) \Rightarrow \frac{\mathrm{d} h}{\mathrm{d} t} =\frac{1}{A}(\dot{q}_{in}-\dot{q}_{out}) ⇒dtdh=A1(q˙in−q˙out)
流阻压差:
P 1 − P a = ρ q o u t R P_1-P_a=\rho q_{out}R P1−Pa=ρqoutR
q o u t = P 1 − P a ρ R = P a − ρ g h − P a ρ R = g h R \begin{aligned} q_{out} &=\frac{P_1-P_a}{\rho R}\\ &=\frac{P_a-\rho gh-P_a}{\rho R}\\ &=\frac{gh}{ R} \end{aligned} qout=ρRP1−Pa=ρRPa−ρgh−Pa=Rgh
⇒ d h d t = q ˙ i n A − g h A R \Rightarrow \frac{\mathrm{d} h}{\mathrm{d} t} =\frac{\dot{q}_{in}}{A}-\frac{gh}{ AR} ⇒dtdh=Aq˙in−ARgh
4.拉普拉斯变换
拉普拉斯变换是控制理论的基础,它广泛的应用于工程分析当中,它可以把时域( t t t)上的函数变换到复数域( s = σ + j w s=\sigma+jw s=σ+jw)上,从而大大简化系统分析的难度和复杂程度。
f ( t ) → F ( s ) f(t) \to F(s) f(t)→F(s)
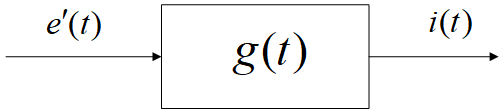
先从一个简单的电路系统开始,它的动态方程:
e ′ = L i ′ ′ + R i ′ + 1 C i e^{'}=Li^{''}+Ri^{'}+\frac{1}{C}i e′=Li′′+Ri′+C1i
定义系统的输入为 e e e,输出为 i i i,分析电流的变化。本质上就是求解微分方程的过程,假设 g ( t ) g(t) g(t)就是变化过程, g ( t ) g(t) g(t)隐含了系统的特征,就是微分方程表现出来的内容,三者的关系其实是一个卷积的过程。因此分析这样一个系统,它涉及到了卷积和微分方程,分析和计算起来都非常麻烦,而且不是很直观。拉普拉斯变换可以帮助我们解决这些问题,通过拉普拉斯变换,微分方程变成了代数方程,卷积运算变成了乘法运算。
对时域函数 f ( t ) f(t) f(t)作拉普拉斯变换:
L [ f ( t ) ] = F ( s ) = ∫ 0 ∞ f ( t ) e − s t d t \mathcal{L[f(t)]}=F(s)=\int_0^\infty f(t)e^{-st}dt L[f(t)]=F(s)=∫0∞f(t)e−stdt
f ( t ) f(t) f(t)是一个平面图形,经过拉普拉斯变换后三维的复数域。当 σ = 0 \sigma=0 σ=0时,从箭头的方向看过去,就是傅里叶变换,可以看到拉普拉斯变换和傅里叶变换的关系。
F ( s ) = F ( w ) = ∫ 0 ∞ f ( t ) e − j w t d t F(s)=F(w)=\int_0^\infty f(t)e^{-jwt}dt F(s)=F(w)=∫0∞f(t)e−jwtdt
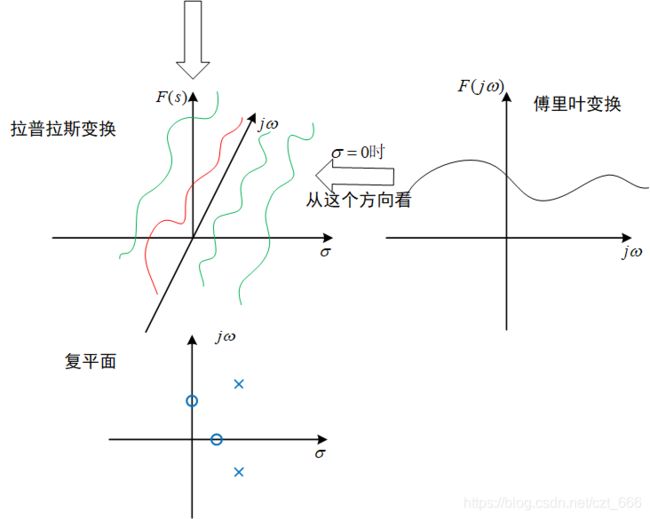
从上向下看就是复平面,做工程的往往会关注系统的极点和零点在复平面上的位置.
对指数函数 f ( t ) = e − a t f(t)=e^{-at} f(t)=e−at的拉普拉斯变换
L [ f ( t ) ] = ∫ 0 ∞ e − a t e − s t d t = ∫ 0 ∞ e − ( a + s ) t d t = − 1 a + s e − ( a + s ) t ∣ 0 ∞ = lim t → ∞ − 1 a + s e − ( a + s ) t − ( − 1 a + s ) = 1 a + s \begin{aligned} \mathcal{L}[f(t)] & = \int_0^\infty e^{-at} e^{-st}dt\\ & = \int_0^\infty e^{-(a+s)t}dt\\ & = -\frac{1}{a+s} \left. e^{-(a+s)t}\right|_0^\infty\\ & = \lim_{t \to \infty}-\frac{1}{a+s}e^{-(a+s)t}-(-\frac{1}{a+s})\\ & = \frac{1}{a+s} \end{aligned} L[f(t)]=∫0∞e−ate−stdt=∫0∞e−(a+s)tdt=−a+s1e−(a+s)t∣∣∣0∞=t→∞lim−a+s1e−(a+s)t−(−a+s1)=a+s1
拉普拉斯变换的重要性质:符合线性变换,线性变换符合叠加原理
L [ a f ( t ) + b g ( t ) ] = a F ( s ) + b G ( s ) \mathcal{L}[af(t)+bg(t)]=aF(s)+bG(s) L[af(t)+bg(t)]=aF(s)+bG(s)
正弦 sin a t \sin at sinat的拉普拉斯变换
根据欧拉公式转化为复指数
e i θ = cos θ + i sin θ e^{i\theta}=\cos \theta+i\sin \theta eiθ=cosθ+isinθ
e − i θ = cos θ − i sin θ e^{-i\theta}=\cos \theta-i\sin \theta e−iθ=cosθ−isinθ
两式相减:
e i θ − e − i θ = 2 i sin θ sin θ = e i θ − e − i θ 2 i e^{i\theta}-e^{-i\theta}=2i\sin \theta\\ \sin\theta=\frac{e^{i\theta}-e^{-i\theta}}{2i} eiθ−e−iθ=2isinθsinθ=2ieiθ−e−iθ
sin a t = e i a t − e − i a t 2 i \sin at=\frac{e^{iat}-e^{-iat}}{2i} sinat=2ieiat−e−iat
因为拉普拉斯变换是一个线性变换
L [ e i a t 2 i ] − L [ e − i a t 2 i ] = 1 2 i ( L [ e i a t ] − L [ e − i a t ] ) = 1 2 i ( 1 s − a i − 1 s + a i ) = 1 2 i ( 2 a i ( s − a i ) ( s + a i ) ) = a s 2 + a 2 \begin{aligned} \mathcal{L}\left [ \frac{e^{iat}}{2i} \right ] -\mathcal{L}\left [ \frac{e^{-iat}}{2i} \right ] & = \frac{1}{2i} \left ( \mathcal{L}\left [ e^{iat} \right ] -\mathcal{L}\left [ e^{-iat} \right ] \right ) \\ & = \frac{1}{2i} \left ( \frac{1}{s-ai}-\frac{1}{s+ai} \right ) \\ & = \frac{1}{2i} \left ( \frac{2ai}{(s-ai)(s+ai)} \right )\\ & = \frac{a}{s^2+a^2} \end{aligned} L[2ieiat]−L[2ie−iat]=2i1(L[eiat]−L[e−iat])=2i1(s−ai1−s+ai1)=2i1((s−ai)(s+ai)2ai)=s2+a2a
导数的拉普拉斯变换
L [ f ′ ( t ) ] = ∫ 0 + ∞ f ′ ( t ) e − s t d t \mathcal{L}\left [ f^{'}(t) \right ] =\int_0^{+\infty}f^{'}(t)e^{-st}dt L[f′(t)]=∫0+∞f′(t)e−stdt
复合函数求积分,用到分部积分:
∫ 0 + ∞ f ′ ( t ) g ( t ) d t = f ( t ) g ( t ) − ∫ 0 + ∞ f ( t ) g ′ ( t ) d t \int_0^{+\infty}f^{'}(t)g(t)dt=f(t)g(t)-\int_0^{+\infty}f(t)g^{'}(t)dt ∫0+∞f′(t)g(t)dt=f(t)g(t)−∫0+∞f(t)g′(t)dt
g ( t ) = e − s t , g ′ ( t ) = − s e − s t g(t)=e^{-st},g^{'}(t)=-se^{-st} g(t)=e−st,g′(t)=−se−st
L [ f ′ ( t ) ] = f ( t ) e − s t ∣ 0 ∞ − ∫ 0 + ∞ f ( t ) ( − s e − s t ) d t = lim t → ∞ f ( t ) e − s t − f ( 0 ) − s ∫ 0 + ∞ f ( t ) ( − e − s t ) d t = s F ( s ) − f ( 0 ) = s F ( s ) \begin{aligned} \mathcal{L}\left [ f^{'}(t) \right ] & = \left . f(t)e^{-st} \right |_0^{\infty}-\int_0^{+\infty}f(t)(-se^{-st})dt\\ & = \lim_{t \to \infty}f(t)e^{-st}-f(0)-s\int_0^{+\infty}f(t)(-e^{-st})dt\\ & = sF(s)-f(0)\\ & = sF(s) \end{aligned} L[f′(t)]=f(t)e−st∣∣0∞−∫0+∞f(t)(−se−st)dt=t→∞limf(t)e−st−f(0)−s∫0+∞f(t)(−e−st)dt=sF(s)−f(0)=sF(s)
F ( s ) F(s) F(s)为拉普拉斯变换,很多时候都把初始条件设置为 f ( 0 ) = 0 f(0)=0 f(0)=0。
同理可得
L [ f ′ ′ ( t ) ] = s 2 F ( s ) − s f ( 0 ) − f ′ ( 0 ) \mathcal{L}\left [ f^{''}(t) \right ] = s^2F(s)-sf(0)-f^{'}(0) L[f′′(t)]=s2F(s)−sf(0)−f′(0)
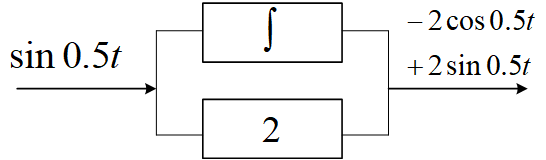
L [ ∫ 0 ∞ f ( t ) d t ] = 1 s F ( s ) \mathcal{L}\left [ \int_0^\infty f(t)dt \right ] = \frac{1}{s} F(s) L[∫0∞f(t)dt]=s1F(s)
卷积的拉普拉斯变换
能够将卷积运算变成乘积运算,大大简化运算和分析的复杂程度。
L [ f ( t ) ∗ g ( t ) ] = F ( s ) G ( s ) \mathcal{L}\left [ f(t)*g(t) \right ]=F(s)G(s) L[f(t)∗g(t)]=F(s)G(s)
回到最初的电路的动态方程:
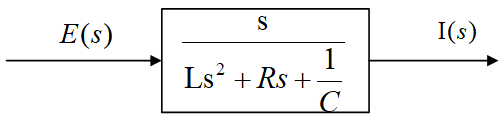
e ′ = L i ′ ′ + R i ′ + 1 C i e^{'}=Li^{''}+Ri^{'}+\frac{1}{C}i e′=Li′′+Ri′+C1i
两端作拉普拉斯变换:
s E ( s ) = L s 2 I ( s ) + s R I ( s ) + 1 C I ( s ) sE(s)=Ls^2I(s)+sRI(s)+\frac{1}{C}I(s) sE(s)=Ls2I(s)+sRI(s)+C1I(s)
I ( s ) = s L s 2 + s R + 1 C E ( s ) I(s)=\frac{s}{Ls^2+sR+\frac{1}{C}}E(s) I(s)=Ls2+sR+C1sE(s)
可以看到,经过拉普拉斯变换把微分方程变换为代数方程,它只有加减乘除,非常的简单。下图方框称之为传递函数。
5.拉普拉斯变换的收敛域(ROC)与逆变换(ILT)
指数函数的拉普拉斯变换:
L [ f ( t ) ] = ∫ 0 ∞ e − a t e − s t d t = ∫ 0 ∞ e − ( a + s ) t d t = − 1 a + s e − ( a + s ) t ∣ 0 ∞ \begin{aligned} \mathcal{L}[f(t)] & = \int_0^\infty e^{-at} e^{-st}dt\\ & = \int_0^\infty e^{-(a+s)t}dt\\ & = -\frac{1}{a+s} \left. e^{-(a+s)t}\right|_0^\infty\\ \end{aligned} L[f(t)]=∫0∞e−ate−stdt=∫0∞e−(a+s)tdt=−a+s1e−(a+s)t∣∣∣0∞
如果 s = − 2 a , L [ f ( t ) ] s=-2a,\mathcal{L}[f(t)] s=−2a,L[f(t)]是发散的
∫ 0 ∞ e − ( a + s ) t d t = ∫ 0 ∞ e a t d t \int_0^\infty e^{-(a+s)t}dt= \int_0^\infty e^{at}dt ∫0∞e−(a+s)tdt=∫0∞eatdt
加上限制条件,收敛域ROC:Region of lonvergence,把 s = σ + j w 代 入 s=\sigma+jw代入 s=σ+jw代入
∫ 0 ∞ e − a t e − ( σ + j w ) t d t = ∫ 0 ∞ e − ( a + σ ) t e − j w t d t \int_0^\infty e^{-at} e^{-(\sigma+jw)t}dt=\int_0^\infty e^{-(a+\sigma)t}e^{-jwt}dt ∫0∞e−ate−(σ+jw)tdt=∫0∞e−(a+σ)te−jwtdt
根据欧拉公式:
e − j w t = cos w t − i sin w t e^{-jwt}=\cos wt-i\sin wt e−jwt=coswt−isinwt
∣ e − j w t ∣ = cos 2 w t + sin 2 w t = 1 \left | e^{-jwt} \right | =\cos^2 wt+\sin^2 wt=1 ∣∣e−jwt∣∣=cos2wt+sin2wt=1
e − j w t e^{-jwt} e−jwt这一项仅仅带来的是振动,并不会对系统的收敛产生影响。因此收敛域为
− ( a + σ ) < 0 ⇒ σ > − a ⇒ R e ( s ) > − a -(a+\sigma)<0\\ \Rightarrow \sigma >-a\\ \Rightarrow Re(s) >-a −(a+σ)<0⇒σ>−a⇒Re(s)>−a
前面我们已经知道,拉普拉斯能简化运算和分析,为什么还需要微分方程?因为微分方程能够描述动态世界的数学手段。
在经典控制理论和现代控制理论当中,研究对象一般是常系数微分方程,对应的系统就是线性时不变系统,如果是非线性系统的话,一般会在平衡点附近作线性化处理,或者直接采用非线性分析手段。
用拉普拉斯变换求解微分方程的三个步骤:
- 时域转化到复频域 t → s t \to s t→s,这里用到拉普拉斯变换
- 求解代数方程
- 把结果从复频域转回时域,用到拉普拉斯逆变换
拉普拉斯逆变换
例子
F ( s ) = − s + 5 s 2 + 5 s + 4 = − s + 5 ( s + 4 ) ( s + 1 ) = A s + 4 + B s + 1 = A ( s + 1 ) + B ( s + 4 ) ( s + 4 ) ( s + 1 ) \begin{aligned} F(s) & = \frac{-s+5}{s^2+5s+4}\\ & = \frac{-s+5}{(s+4)(s+1)}\\ & = \frac{A}{s+4}+\frac{B}{s+1}\\ & = \frac{A(s+1)+B(s+4)}{(s+4)(s+1)}\\ \end{aligned} F(s)=s2+5s+4−s+5=(s+4)(s+1)−s+5=s+4A+s+1B=(s+4)(s+1)A(s+1)+B(s+4)
⇒ A ( s + 1 ) + B ( s + 4 ) = − s + 5 \Rightarrow A(s+1)+B(s+4)=-s+5 ⇒A(s+1)+B(s+4)=−s+5
s = − 1 : B ( − 1 + 4 ) = 1 + 5 ⇒ B = 2 s=-1:\quad B(-1+4)=1+5 \Rightarrow B=2 s=−1:B(−1+4)=1+5⇒B=2
s = − 4 : − 3 A = 9 ⇒ A = − 3 s=-4:\quad -3A=9 \Rightarrow A=-3 s=−4:−3A=9⇒A=−3
F ( s ) = − 3 s + 4 + 2 s + 1 F(s) = \frac{-3}{s+4}+\frac{2}{s+1} F(s)=s+4−3+s+12
两端拉普拉斯逆变换:
L − 1 [ F ( s ) ] = L − 1 [ − 3 s + 4 + 2 s + 1 ] = − 3 e − 4 t + 2 e − t \mathcal{L}^{-1}\left [ F(s) \right ] = \mathcal{L}^{-1}\left [ \frac{-3}{s+4}+\frac{2}{s+1} \right ] \\ =-3e^{-4t}+2e^{-t} L−1[F(s)]=L−1[s+4−3+s+12]=−3e−4t+2e−t
s = − 1 , s = − 4 s=-1,s=-4 s=−1,s=−4称为极点Pole
F ( s ) = 4 s + 8 s 2 + 2 s + 5 = 4 s + 8 ( s + 1 + 2 i ) ( s + 1 − 2 i ) = A s + 1 + 2 i + B s + 1 − 2 i \begin{aligned} F(s) & = \frac{4s+8}{s^2+2s+5}\\ & = \frac{4s+8}{(s+1+2i)(s+1-2i)}\\ & = \frac{A}{s+1+2i}+\frac{B}{s+1-2i}\\ \end{aligned} F(s)=s2+2s+54s+8=(s+1+2i)(s+1−2i)4s+8=s+1+2iA+s+1−2iB
⇒ A = i + 2 , B = − i + 2 \Rightarrow A=i+2,B=-i+2 ⇒A=i+2,B=−i+2
F ( s ) = i + 2 s + 1 + 2 i + − i + 2 s + 1 − 2 i F(s) = \frac{i+2}{s+1+2i}+\frac{-i+2}{s+1-2i} F(s)=s+1+2ii+2+s+1−2i−i+2
f ( t ) = L − 1 [ F ( s ) ] = ( i + 2 ) e − ( 1 + 2 i ) t + ( − i + 2 ) e − ( 1 − 2 i ) t = e − t ( i e − 2 i t + 2 e − 2 i t − i e 2 i t + 2 e 2 i t ) = e − t ( i ( e − 2 i t − e 2 i t ) + 2 ( e − 2 i t + e 2 i t ) ) = e − t ( 2 sin + 4 cos 2 t ) \begin{aligned} f(t) &=\mathcal{L}^{-1}[F(s)]=(i+2)e^{-(1+2i)t}+(-i+2)e^{-(1-2i)t}\\ &=e^{-t}\left ( ie^{-2it}+2e^{-2it}-ie^{2it}+2e^{2it} \right )\\ &=e^{-t}\left ( i\left ( e^{-2it}-e^{2it} \right ) +2\left ( e^{-2it}+e^{2it} \right ) \right )\\ &=e^{-t}(2\sin +4\cos 2t ) \end{aligned} f(t)=L−1[F(s)]=(i+2)e−(1+2i)t+(−i+2)e−(1−2i)t=e−t(ie−2it+2e−2it−ie2it+2e2it)=e−t(i(e−2it−e2it)+2(e−2it+e2it))=e−t(2sin+4cos2t)
其中,根据欧拉公式有
e i θ = cos θ + i sin θ (1) e^{i\theta}=\cos \theta+i\sin \theta\tag{1} eiθ=cosθ+isinθ(1)
e − i θ = cos θ − i sin θ (2) e^{-i\theta}=\cos \theta-i\sin \theta\tag{2} e−iθ=cosθ−isinθ(2)
(2)-(1)
sin 2 t = − e − 2 i t − e 2 i t 2 i \sin 2t=-\frac{e^{-2it}-e^{2it}}{2i} sin2t=−2ie−2it−e2it
cos 2 t = e − 2 i t + e 2 i t 2 \cos 2t=\frac{e^{-2it}+e^{2it}}{2} cos2t=2e−2it+e2it
6.拉&传&微的关系
重点讲解传递函数
这部分内容非常重要,对经典控制理论、根轨迹、伯德图、信号处理等学习都有很大的帮助,因为都是从这里伸展出去的。
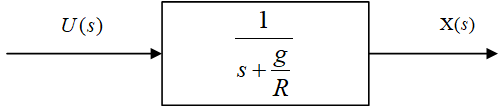
流体系统
d h d t + g A R h = q ˙ i n A \frac{\mathrm{d} h}{\mathrm{d} t}+ \frac{g}{ AR}h=\frac{\dot{q}_{in}}{A} dtdh+ARgh=Aq˙in
令A=1
x = h x=h x=h输出
u = q i n u=q_{in} u=qin输入
x ˙ ( t ) + g R x ( t ) = u ( t ) \dot x(t)+ \frac{g}{ R}x(t)=u(t) x˙(t)+Rgx(t)=u(t)
两端作拉普拉斯变换:
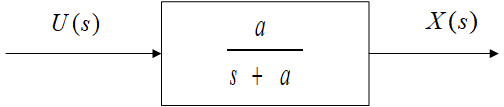
s X ( s ) + g R X ( s ) = U ( s ) , x ( 0 ) = 0 sX(s)+\frac{g}{ R}X(s)=U(s),\quad x(0)=0 sX(s)+RgX(s)=U(s),x(0)=0
s + g R X ( s ) U ( s ) = 1 s + g R = G ( s ) s+\frac{g}{ R}\frac{X(s)}{U(s)}=\frac{1}{s+\frac{g}{ R}}=G(s) s+RgU(s)X(s)=s+Rg1=G(s)
G ( s ) G(s) G(s)称为传递函数
假设系统的输入为常数,对常数作拉普拉斯变换
u ( t ) = C = C e 0 u(t)=C=Ce^0 u(t)=C=Ce0
L [ u ( t ) ] = C 1 s + 0 = C 1 s \mathcal{L}[u(t)]=C\frac{1}{s+0} =C\frac{1}{s} L[u(t)]=Cs+01=Cs1
X ( s ) = U ( s ) G ( s ) = C 1 s ⋅ 1 s + g R = C ( A s + B s + g R ) = C A ( s + g R ) + B s s ( s + g R ) \begin{aligned} X(s) & = U(s)G(s) = C\frac{1}{s} \cdot \frac{1}{s+\frac{g}{ R}}\\ & = C\left ( \frac{A}{s}+ \frac{B}{s+\frac{g}{ R}} \right ) \\ & = C\frac{A(s+\frac{g}{ R})+Bs}{s(s+\frac{g}{ R})} \end{aligned} X(s)=U(s)G(s)=Cs1⋅s+Rg1=C(sA+s+RgB)=Cs(s+Rg)A(s+Rg)+Bs
s = 0 : A = R g s=0:A=\frac{R}{g} s=0:A=gR
s = − g R : B = − R g s=-\frac{g}{ R}:B=-\frac{R}{g} s=−Rg:B=−gR
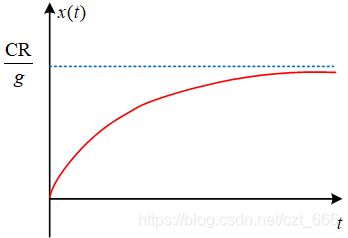
X ( s ) = C ( R g 1 s − R g 1 s + g R ) = C R g ( 1 s − 1 s + g R ) \begin{aligned} X(s) = C\left ( \frac{R}{g}\frac{1}{s}-\frac{R}{g} \frac{1}{s+\frac{g}{ R}} \right ) \end{aligned}=\frac{CR}{g}\left ( \frac{1}{s}-\frac{1}{s+\frac{g}{ R}} \right ) X(s)=C(gRs1−gRs+Rg1)=gCR(s1−s+Rg1)
x ( t ) = C R g ( e 0 t − e − g R t ) = C R g ( 1 − e − g R t ) \begin{aligned} x(t) & = \frac{CR}{g}\left ( e^{0t}-e^{-\frac{g}{ R}t} \right )\\ & = \frac{CR}{g}\left ( 1-e^{-\frac{g}{ R}t} \right ) \end{aligned} x(t)=gCR(e0t−e−Rgt)=gCR(1−e−Rgt)
当时间 t → ∞ t \to \infty t→∞,系统收敛到 C R g \frac{CR}{g} gCR。系统的关键点在指数部分, 0 t 0t 0t不变, C R g t \frac{CR}{g}t gCRt随着时间不断的衰减,所以系统是稳定的。
7.一阶系统的单位阶跃响应
流体系统
动态方程:
x ˙ ( t ) + g R x ( t ) = u ( t ) \dot x(t)+ \frac{g}{ R}x(t)=u(t) x˙(t)+Rgx(t)=u(t)
输出是一阶,输入是单位阶跃,称为一阶系统的单位阶跃响应 Unit Step Response.
一般形式:
u ( t ) = { 0 , t = 0 1 , t > 0 u(t)=\left\{\begin{matrix} 0\quad ,t=0 \\ 1\quad,t>0 \end{matrix}\right. u(t)={0,t=01,t>0
L [ u ( t ) ] = 1 s + 0 = 1 s \mathcal{L}[u(t)]=\frac{1}{s+0} =\frac{1}{s} L[u(t)]=s+01=s1
X ( s ) = 1 s ⋅ a s + a = A s + B s + a = A ( s + a ) + B s s ( s + a ) X(s)=\frac{1}{s}\cdot\frac{a}{s+a}=\frac{A}{s}+\frac{B}{s+a}=\frac{A(s+a)+Bs}{s(s+a)} X(s)=s1⋅s+aa=sA+s+aB=s(s+a)A(s+a)+Bs
A ( s + a ) + B s = a A(s+a)+Bs=a A(s+a)+Bs=a
s = − a : s=-a: s=−a:B=-1
s = 0 : s=0: s=0:A=1
两边作拉普拉斯逆变换:
L − 1 [ X ( s ) ] = L − 1 [ 1 s − 1 s + a ] \mathcal{L}^{-1}\left [ X(s) \right ] =\mathcal{L}^{-1} \left [ \frac{1}{s}-\frac{1}{s+a} \right ] L−1[X(s)]=L−1[s1−s+a1]
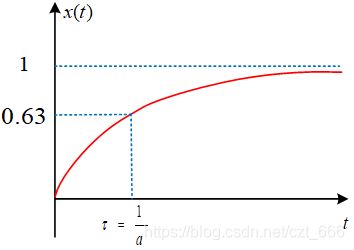
x ( t ) = 1 − e − a t x(t)=1-e^{-at} x(t)=1−e−at
a越大收敛越快。
时间常数 time constant t = τ = 1 a t=\tau =\frac{1}{a} t=τ=a1
x ( τ ) = 1 − e − a 1 a = 1 − e − 1 = 0.63 x(\tau)=1-e^{-a\frac{1}{a}}=1-e^{-1}=0.63 x(τ)=1−e−aa1=1−e−1=0.63
即 τ = 1 a \tau =\frac{1}{a} τ=a1的时候达到最终状态的63%。
有时候还会引入另一个概念-稳定时间(Steady State)(整定时间)Setting time
T s s = 4 τ T_{ss}=4\tau Tss=4τ
x ( T s s ) = x ( 4 a ) = 1 − e − a 4 a = 1 − e − 4 = 0.98 x(T_{ss})=x(\frac{4}{a})=1-e^{-a\frac{4}{a}}=1-e^{-4}=0.98 x(Tss)=x(a4)=1−e−aa4=1−e−4=0.98
对于一阶线性系统来说,时间常数是特有的,因此可以用时间常数作系统识别。
根据上一节有:
x ( t ) = C R g ( 1 − e − g R t ) x(t) = \frac{CR}{g}\left ( 1-e^{-\frac{g}{ R}t} \right ) x(t)=gCR(1−e−Rgt)
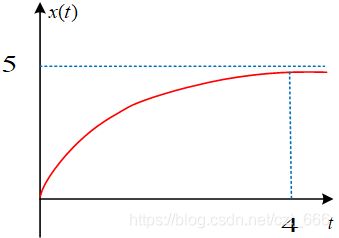
4秒钟达到稳定时间:
T s s = 4 T_{ss}=4 Tss=4
⇒ τ = 1 \Rightarrow \tau=1 ⇒τ=1
系统的传递函数:
G ( s ) = 1 s + g R G(s)=\frac{1}{s+\frac{g}{R} } G(s)=s+Rg1
⇒ τ = R g = 1 \Rightarrow \tau=\frac{R}{g}=1 ⇒τ=gR=1
C R g = 5 ⇒ C = 5 \frac{CR}{g}=5 \Rightarrow C=5 gCR=5⇒C=5
一阶系统与信号处理
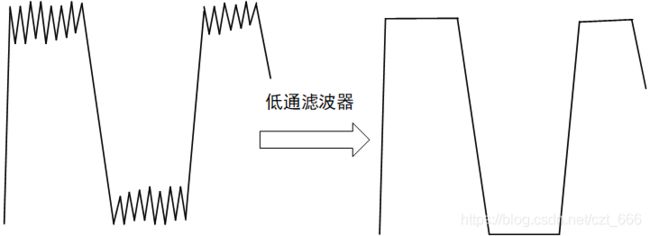
一阶系统是一个低通滤波器,低通滤波器只反映了低频变化,高频变化则被过滤了。对于流体系统来说,容器内的液体就起到了抵抗高速变化的作用,是因为它有积累,所以说有积累的都是低通滤波器,它对高速变化不敏感。最典型的积累就是积分,如:
∫ cos x + cos 100 x d x = sin x + 1 100 sin 100 x + C \int \cos x +\cos 100x dx=\sin x +\frac{1}{100} \sin 100x +C ∫cosx+cos100xdx=sinx+1001sin100x+C
高频变化被缩放100倍,相当于被过滤掉了。所以说大家平时多做积累,有了容量以后面对高速变化的世界才可以做到处乱不惊。
另一个角度
一阶线性时不变系统1st order LTI:
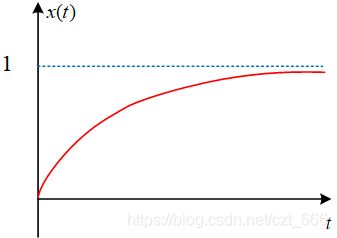
x ˙ + a x = a u , t ≥ 0 , u = 1 \dot x+ax=au,\quad t\ge 0,u=1 x˙+ax=au,t≥0,u=1
x ˙ = a ( 1 − x ) \dot x=a(1-x) x˙=a(1−x)
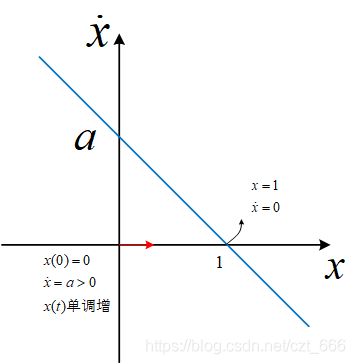
x ( t ) x(t) x(t)单调增, x ˙ \dot x x˙逐渐减小, x ( t ) x(t) x(t)增加速度减缓,最后为零,可以得到一样的图。
其他情况, a < 0 , x ( 0 ) ≠ 0 a<0,x(0) \ne 0 a<0,x(0)=0等
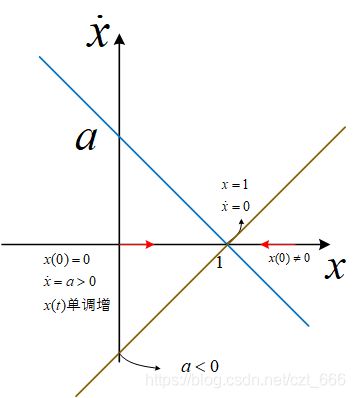
Phase-Portrait
8.频率响应与滤波器
信号通过线性时不变系统后频率不变
M i sin ( w t + ϕ i ) → M o sin ( w t + ϕ o ) M_i \sin(wt+\phi_i)\to M_o \sin(wt+\phi_o) Misin(wt+ϕi)→Mosin(wt+ϕo)
振幅响应 Magnitude Response:
M o M i = M \frac{M_o}{M_i}=M MiMo=M
辐角响应 Phase Response:
ϕ o − ϕ i = ϕ \phi_o-\phi_i=\phi ϕo−ϕi=ϕ
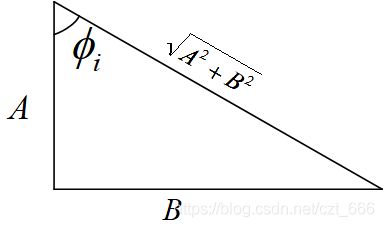
一般形式:
u ( t ) = A sin w t + B cos w t = A 2 + B 2 ( A A 2 + B 2 sin w t + B A 2 + B 2 cos w t ) = A 2 + B 2 ( cos ϕ i sin w t + sin ϕ i cos w t ) = A 2 + B 2 sin ( w t + ϕ i ) = M i sin ( w t + ϕ i ) \begin{aligned} u(t) & = A\sin wt +B\cos wt\\ & = \sqrt{A^2+B^2}\left ( \frac{A}{\sqrt{A^2+B^2}} \sin wt +\frac{B}{\sqrt{A^2+B^2}} \cos wt \right ) \\ & = \sqrt{A^2+B^2}\left ( \cos \phi_i \sin wt + \sin \phi_i \cos wt \right ) \\ & = \sqrt{A^2+B^2} \sin (wt +\phi_i )\\ &=M_i \sin(wt+\phi_i) \end{aligned} u(t)=Asinwt+Bcoswt=A2+B2(A2+B2Asinwt+A2+B2Bcoswt)=A2+B2(cosϕisinwt+sinϕicoswt)=A2+B2sin(wt+ϕi)=Misin(wt+ϕi)
两边作拉普拉斯变换:
U ( s ) = A w s 2 + w 2 + B s s 2 + w 2 = A w + B s s 2 + w 2 = A w + B s ( s + j w ) ( s − j w ) \begin{aligned} U(s) & = \frac{Aw}{s^2+w^2} +\frac{Bs}{s^2+w^2} \\ & = \frac{Aw+Bs}{s^2+w^2} \\ & = \frac{Aw+Bs}{(s+jw)(s-jw)} \end{aligned} U(s)=s2+w2Aw+s2+w2Bs=s2+w2Aw+Bs=(s+jw)(s−jw)Aw+Bs
其中, j = − 1 j=\sqrt{-1} j=−1
G ( s ) = D ( s ) N ( s ) = D ( s ) ( s − p 1 ) ( s − p 2 ) ⋯ ( s − p n ) G(s)=\frac{D(s)}{N(s)} =\frac{D(s)}{(s-p_1)(s-p_2)\cdots (s-p_n)} G(s)=N(s)D(s)=(s−p1)(s−p2)⋯(s−pn)D(s)
p 1 , p 2 , ⋯ , p n p_1,p_2,\cdots ,p_n p1,p2,⋯,pn:极点Poles
X ( s ) = U ( s ) G ( s ) = A w + B s ( s + j w ) ( s − j w ) ⋅ D ( s ) ( s − p 1 ) ( s − p 2 ) ⋯ ( s − p n ) = K 1 s + j w + K 2 s − j w + C 1 s − p 1 + C 2 s − p 2 + ⋯ + C n s − p 1 = K 1 ( s − j w ) N ( s ) + K 2 ( s + j w ) N ( s ) + C 1 ( s + j w ) ( s − j w ) + C 2 ( s + j w ) ( s − j w ) ( s − p 2 ) ⋯ ( s − p n ) + ⋯ ( s + j w ) ( s − j w ) ( s − p 1 ) ( s − p 2 ) ⋯ ( s − p n ) = A w + B s ( s + j w ) ( s − j w ) ( s − p 1 ) ( s − p 2 ) ⋯ ( s − p n ) \begin{aligned} X(s) & = U(s)G(s)\\ & = \frac{Aw+Bs}{(s+jw)(s-jw)}\cdot \frac{D(s)}{(s-p_1)(s-p_2)\cdots (s-p_n)}\\ & = \frac{K_1}{s+jw}+ \frac{K_2}{s-jw}+\frac{C_1}{s-p_1}+\frac{C_2}{s-p_2}+\cdots+\frac{C_n}{s-p_1}\\ & = \frac{K_1(s-jw)N(s)+K_2(s+jw)N(s)+C_1(s+jw)(s-jw)+C_2(s+jw)(s-jw)(s-p_2)\cdots (s-p_n)+\cdots }{(s+jw)(s-jw)(s-p_1)(s-p_2)\cdots (s-p_n)}\\ & = \frac{Aw+Bs}{(s+jw)(s-jw)(s-p_1)(s-p_2)\cdots (s-p_n)} \end{aligned} X(s)=U(s)G(s)=(s+jw)(s−jw)Aw+Bs⋅(s−p1)(s−p2)⋯(s−pn)D(s)=s+jwK1+s−jwK2+s−p1C1+s−p2C2+⋯+s−p1Cn=(s+jw)(s−jw)(s−p1)(s−p2)⋯(s−pn)K1(s−jw)N(s)+K2(s+jw)N(s)+C1(s+jw)(s−jw)+C2(s+jw)(s−jw)(s−p2)⋯(s−pn)+⋯=(s+jw)(s−jw)(s−p1)(s−p2)⋯(s−pn)Aw+Bs
拉普拉斯逆变换:
x ( t ) = K 1 e − j w t + K 2 e j w t + C 1 e p 1 t + C 2 e p 2 t + ⋯ + C n e p n t x(t)=K_1e^{-jwt}+K_2e^{jwt}+C_1e^{p_1t}+C_2e^{p_2t}+\cdots +C_ne^{p_nt} x(t)=K1e−jwt+K2ejwt+C1ep1t+C2ep2t+⋯+Cnepnt
对于稳定系统, p 1 , p 2 , ⋯ , p n p_1,p_2,\cdots ,p_n p1,p2,⋯,pn的实部小于0,有
X s s ( t ) = K 1 e − j w t + K 2 e j w t X_{ss}(t)=K_1e^{-jwt}+K_2e^{jwt} Xss(t)=K1e−jwt+K2ejwt
ss:Steady State 稳态,由上式可以看出频率响应就是稳态响应。求 K 1 , K 2 K_1,K_2 K1,K2:
K 1 ( s − j w ) N ( s ) + K 2 ( s + j w ) N ( s ) + C 1 ( s + j w ) ( s − j w ) + C 2 ( s + j w ) ( s − j w ) ( s − p 2 ) ⋯ ( s − p n ) + ⋯ = ( A w + B s ) D ( s ) K_1(s-jw)N(s)+K_2(s+jw)N(s)+C_1(s+jw)(s-jw)\\+C_2(s+jw)(s-jw)(s-p_2)\cdots (s-p_n)+\cdots=(Aw+Bs)D(s) K1(s−jw)N(s)+K2(s+jw)N(s)+C1(s+jw)(s−jw)+C2(s+jw)(s−jw)(s−p2)⋯(s−pn)+⋯=(Aw+Bs)D(s)
s = − j w s=-jw s=−jw
K 1 ( − j w − j w ) N ( − j w ) + 0 = ( A w − B j w ) D ( − j w ) K_1(-jw-jw)N(-jw)+0=(Aw-Bjw)D(-jw) K1(−jw−jw)N(−jw)+0=(Aw−Bjw)D(−jw)
K 1 = A w − B j w − 2 j w ⋅ D ( − j w ) N ( − j w ) = B + A j 2 G ( − j w ) K_1=\frac{Aw-Bjw}{-2jw}\cdot \frac{D(-jw)}{N(-jw)}=\frac{B+Aj}{2}G(-jw) K1=−2jwAw−Bjw⋅N(−jw)D(−jw)=2B+AjG(−jw)
s = j w s=jw s=jw
K 2 = B − A j 2 G ( j w ) K_2=\frac{B-Aj}{2}G(jw) K2=2B−AjG(jw)
复数表达:
G ( j w ) = ∣ G ( j w ) ∣ e j ϕ G G(jw)=\left | G(jw) \right | e^{j \phi_{G}} G(jw)=∣G(jw)∣ejϕG
X s s ( t ) = B + A j 2 ∣ G ( j w ) ∣ e − j ϕ G e − j w t + B − A j 2 ∣ G ( j w ) ∣ e j ϕ G e j w t = 1 2 ∣ G ( j w ) ∣ ( ( B + A j ) e − ( ϕ G + w t ) j + ( B − A j ) e ( ϕ G + w t ) j ) \begin{aligned} X_{ss}(t) & = \frac{B+Aj}{2} \left | G(jw) \right | e^{-j \phi_{G}} e^{-jwt}\\ & + \frac{B-Aj}{2} \left | G(jw) \right | e^{j \phi_{G}} e^{jwt}\\ & = \frac{1}{2} \left | G(jw) \right |\left ( (B+Aj)e^{-(\phi_G +wt)j} +(B-Aj)e^{(\phi_G +wt)j}\right ) \\ \end{aligned} Xss(t)=2B+Aj∣G(jw)∣e−jϕGe−jwt+2B−Aj∣G(jw)∣ejϕGejwt=21∣G(jw)∣((B+Aj)e−(ϕG+wt)j+(B−Aj)e(ϕG+wt)j)
欧拉公式:
e − ( ϕ G + w t ) j = cos ( − ( ϕ G + w t ) ) + j sin ( − ( ϕ G + w t ) ) = cos ( ϕ G + w t ) − j sin ( ϕ G + w t ) e ( ϕ G + w t ) j = cos ( ϕ G + w t ) + j sin ( ϕ G + w t ) \begin{aligned} e^{-(\phi_G +wt)j} & = \cos (-(\phi_G +wt))+j \sin (-(\phi_G +wt))\\ & = \cos (\phi_G +wt)-j \sin (\phi_G +wt)\\ e^{(\phi_G +wt)j} & = \cos (\phi_G +wt)+j \sin (\phi_G +wt) \end{aligned} e−(ϕG+wt)je(ϕG+wt)j=cos(−(ϕG+wt))+jsin(−(ϕG+wt))=cos(ϕG+wt)−jsin(ϕG+wt)=cos(ϕG+wt)+jsin(ϕG+wt)
X s s ( t ) = 1 2 ∣ G ( j w ) ∣ ( B cos ( ϕ G + w t ) − B j sin ( ϕ G + w t ) + A j cos ( ϕ G + w t ) + A sin ( ϕ G + w t ) + B cos ( ϕ G + w t ) + B j sin ( ϕ G + w