PCL点云库学习笔记 点云的欧式聚类
欧式聚类详解(点云数据处理)
欧式聚类是一种基于欧氏距离度量的聚类算法。基于KD-Tree的近邻查询算法是加速欧式聚类算法的重要预处理方法。
KD-Tree最近邻搜索
Kd-树是K-dimension tree的缩写,是对数据点在k维空间中划分的一种数据结构;Kd-树是一种平衡二叉树。为了能有效的找到最近邻,Kd-树采用分而治之的思想,即将整个空间划分为几个小部分。k-d树算法的应用可以分为两方面,一方面是有关k-d树本身这种数据结构建立的算法,另一方面是在建立的k-d树上如何进行最邻近查找的算法。
k-d tree是每个节点均为k维数值点的二叉树,其上的每个节点代表一个超平面,该超平面垂直于当前划分维度的坐标轴,并在该维度上将空间划分为两部分,一部分在其左子树,另一部分在其右子树。即若当前节点的划分维度为d,其左子树上所有点在d维的坐标值均小于当前值,右子树上所有点在d维的坐标值均大于等于当前值,本定义对其任意子节点均成立。
构建开始前,对比数据点在各维度的分布情况,数据点在某一维度坐标值的方差越大分布越分散,方差越小分布越集中。从方差大的维度开始切分可以取得很好的切分效果及平衡性。
KD-Tree构建原理
常规的k-d tree的构建过程为:循环依序取数据点的各维度来作为切分维度,取数据点在该维度的中值作为切分超平面,将中值左侧的数据点挂在其左子树,将中值右侧的数据点挂在其右子树。递归处理其子树,直至所有数据点挂载完毕。
KD-Tree近邻查询
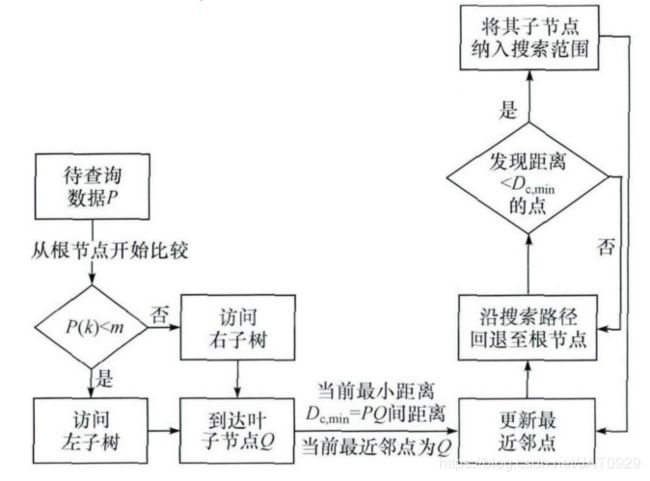
给定点p,查询数据集中与其距离最近点的过程即为最近邻搜索
图中对于给定的查询数据点m,须从KD-Tree的根结点开始进行比较,其中m(k)为当前结点划分维度k上数据点m对应的值,d为当前结点划分的阈值。若 m(k)小于d,则访问左子树;否则访问右子树,直至到达叶子结点Q。此时Q就是当m前最近邻点,而m与Q之间的距离就是当前最小距离Dmin 。随后沿着原搜索路径回退至根结点,若此过程中发现和m之间距离小于 Dmin的点,则须将未曾访问过的子节点均纳入搜索范畴,并及时更新最近邻点,直至所有的搜索路径都为空,整个基于KD-Tree结构的最近邻点查询过程便告完成。
欧式聚类
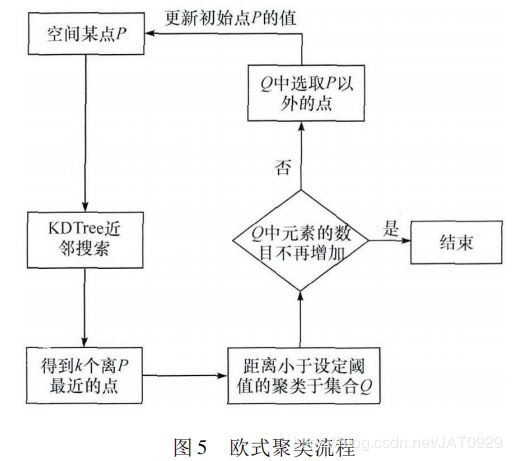
对于欧式聚类来说,距离判断准则为前文提到的欧氏距离。对于空间某点P,通过KD-Tree近邻搜索算法找到k个离p点最近的点,这些点中距离小于设定阈值的便聚类到集合Q中。如果Q中元素的数目不在增加,整个聚类过程便结束;否则须在集合Q中选取p点以外的点,重复上述过程,直到Q中元素的数目不在增加为止。
原文链接:https://blog.csdn.net/JAT0929/article/details/104258461
pcl::EuclideanClusterExtraction是基于欧式距离提取集群的方法,仅依据距离,将小于距离阈值的点云作为一个集群。
具体的实现方法大致是:
(1) 找到空间中某点p10,由kdTree找到离他最近的n个点,判断这n个点到p的距离;
(2) 将距离小于阈值r的点p12、p13、p14…放在类Q里;
(3) 在 Q\p10 里找到一点p12,重复1;
(4) 在 Q\p10、p12 找到一点,重复1,找到p22、p23、p24…全部放进Q里;
(5) 当 Q 再也不能有新点加入了,则完成搜索了。
后面有自定义代码:
https://blog.csdn.net/fei_12138/article/details/109718785
官方教程,结果和下面的代码不一样,下次再试一下:
https://www.pclcn.org/study/shownews.php?id=57
点云欧式聚类算法流程
(1)点云读入;
(2)体素化下采样(方便处理);
(3)去离散点;
(4)RANSAC算法检测平面,并剔除平面点云;
(5)欧式聚类;
(6)结果的输出和可视化;
python代码:
https://zhuanlan.zhihu.com/p/75117664
from paper_1_v0.my_ransac import my_ransac_v5
import numpy as np
img_id = 1 # 这里读入你的kitti 雷达数据即可
path = r'D:\KITTI\Object\training\velodyne\%06d.bin' % img_id ## Path ## need to be changed
points = np.fromfile(path, dtype=np.float32).reshape(-1, 4)
index_ground, index_obj, best_model, alpha = my_ransac_v5(points) # 去除地面,用pcl 的代码也可以,不做也可以
print('points shape', points[index_obj, :3].shape)
s = time.time()
cloud = pcl.PointCloud(points[index_obj, :3])
tree = cloud.make_kdtree()
ec = cloud.make_EuclideanClusterExtraction()
# ec.set_ClusterTolerance(0.02)
ec.set_ClusterTolerance(0.62) # 三个参数设置
ec.set_MinClusterSize(100)
ec.set_MaxClusterSize(15000)
ec.set_SearchMethod(tree)
cluster_indices = ec.Extract()
print('time:', time.time() - s)
print('cluster_indices : ' + str( len(cluster_indices)) + " .")
cluster_points = points[index_obj,:].copy()
cluster_points[:,3] = 1000 # 基础颜色
for j, indices in enumerate(cluster_indices):
print('indices = ' + str(len(indices)))
cluster_points[indices,3] = (j+10) * 4000 # 设置每个类的颜色
color_cloud = pcl.PointCloud_PointXYZRGB(cluster_points)
visual = pcl.pcl_visualization.CloudViewing()
visual.ShowColorCloud(color_cloud, b'cloud')
flag = True
while flag:
flag != visual.WasStopped()体素化下采样:
1.体素滤波
PCL实现的VoxelGrid类通过输入的点云数据创建一个三维体素栅格(可把体素栅格想象为微小的空间三维立方体的集合),然后在每个体素(即,三维立方体)内,用体素中所有点的重心来近似显示体素中其他点,这样该体素就内所有点就用一个重心点最终表示,对于所有体素处理后得到过滤后的点云。
c++代码:
#include //文件输入输出
#include //点类型相关定义
#include //点云可视化相关定义
#include //体素滤波相关
#include
#include
#include
using namespace std;
int main()
{
//1.读取点云
pcl::PointCloud::Ptr cloud(new pcl::PointCloud);
if (pcl::io::loadPCDFile("data\\demo.pcd", *cloud) == -1)
{
PCL_ERROR("Cloudn't read file!");
return -1;
}
cout << "there are " << cloud->points.size() << " points before filtering." << endl;
//2.体素栅格滤波
pcl::PointCloud::Ptr cloud_filter(new pcl::PointCloud);
pcl::VoxelGrid sor;
sor.setInputCloud(cloud);
sor.setLeafSize(0.3f, 0.3f, 0.3f);//体素大小设置为30*30*30cm
sor.filter(*cloud_filter);
//3.滤波结果保存
pcl::io::savePCDFile("data\\demo_filter.pcd", *cloud_filter);
cout << "there are " << cloud_filter->points.size() << " points after filtering." << endl;
system("pause");
return 0;
}
原文链接:https://blog.csdn.net/qq_22170875/article/details/84980996 
体素下采样前
体素滤波(下采样后)
欧式聚类 c++代码:
#include
VTK_MODULE_INIT(vtkRenderingOpenGL)
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
using namespace pcl;
using namespace std;
typedef PointXYZ PoinT;
int *rand_rgb(){//随机产生颜色
int *rgb = new int[3];
rgb[0] = rand() % 255;
rgb[1] = rand() % 255;
rgb[2] = rand() % 255;
return rgb;
}
int main(){
//点云的读取*********************************************************
PointCloud::Ptr cloud(new PointCloud);
if (io::loadPCDFile("C:\\Users\\Administrator\\Desktop\\desk.pcd", *cloud) == -1)
{
PCL_ERROR("read false");
return 0;
}
//体素化下采样******************************************************
VoxelGrid vox;
PointCloud::Ptr vox_cloud(new PointCloud);
vox.setInputCloud(cloud);
vox.setLeafSize(0.01, 0.01, 0.01);
vox.filter(*vox_cloud);
//去除噪声点********************************************************
StatisticalOutlierRemovalsor;
PointCloud::Ptr sor_cloud(new PointCloud);
sor.setMeanK(10);
sor.setInputCloud(vox_cloud);
sor.setStddevMulThresh(0.2);
sor.filter(*sor_cloud);
//平面分割(RANSAC)********************************************************
SACSegmentation sac;
PointIndices::Ptr inliner(new PointIndices);
ModelCoefficients::Ptr coefficients(new ModelCoefficients);
PointCloud::Ptr sac_cloud(new PointCloud);
sac.setInputCloud(sor_cloud);
sac.setMethodType(SAC_RANSAC);
sac.setModelType(SACMODEL_PLANE);
sac.setMaxIterations(100);
sac.setDistanceThreshold(0.02);
//提取平面(展示并输出)******************************************************
PointCloud::Ptr ext_cloud(new PointCloud);
PointCloud::Ptr ext_cloud_rest(new PointCloud);
visualization::PCLVisualizer::Ptr viewer(new visualization::PCLVisualizer("3d view"));
int i = sor_cloud->size(), j = 0;
ExtractIndicesext;
srand((unsigned)time(NULL));//刷新时间的种子节点需要放在循环体外面
while (sor_cloud->size()>i*0.3)//当提取的点数小于总数的3/10时,跳出循环
{
ext.setInputCloud(sor_cloud);
sac.segment(*inliner, *coefficients);
if (inliner->indices.size()==0)
{
break;
}
//按照索引提取点云*************
ext.setIndices(inliner);
ext.setNegative(false);
ext.filter(*ext_cloud);
ext.setNegative(true);
ext.filter(*ext_cloud_rest);
//*****************************
*sor_cloud = *ext_cloud_rest;
stringstream ss;
ss <<"C:\\Users\\Administrator\\Desktop\\"<<"ext_plane_clouds" << j << ".pcd";//路径加文件名和后缀
io::savePCDFileASCII(ss.str(), *ext_cloud);//提取的平面点云写出
int *rgb = rand_rgb();//随机生成0-255的颜色值
visualization::PointCloudColorHandlerCustomrgb1(ext_cloud,rgb[0],rgb[1],rgb[2]);//提取的平面不同彩色展示
delete[]rgb;
viewer->addPointCloud(ext_cloud, rgb1,ss.str());
j++;
}
viewer->spinOnce(1000);
//欧式聚类*******************************************************
vectorece_inlier;
search::KdTree::Ptr tree(new search::KdTree);
EuclideanClusterExtraction ece;
ece.setInputCloud(sor_cloud);
ece.setClusterTolerance(0.02);
ece.setMinClusterSize(100);
ece.setMaxClusterSize(20000);
ece.setSearchMethod(tree);
ece.extract(ece_inlier);
//聚类结果展示***************************************************
ext.setInputCloud(sor_cloud);
visualization::PCLVisualizer::Ptr viewer2(new visualization::PCLVisualizer("Result of EuclideanCluster"));
srand((unsigned)time(NULL));
for (int i = 0; i < ece_inlier.size();i++)
{
PointCloud::Ptr cloud_copy(new PointCloud);
vector ece_inlier_ext = ece_inlier[i].indices;
copyPointCloud(*sor_cloud, ece_inlier_ext, *cloud_copy);//按照索引提取点云数据
stringstream ss1;
ss1 <<"C:\\Users\\Administrator\\Desktop\\"<< "EuclideanCluster_clouds" << j<<".pcd";
io::savePCDFileASCII(ss1.str(), *ext_cloud);//欧式聚类结果写出
int *rgb1 = rand_rgb();
visualization::PointCloudColorHandlerCustomrgb2(ext_cloud, rgb1[0], rgb1[1], rgb1[2]);
delete[]rgb1;
viewer2->addPointCloud(cloud_copy, rgb2,ss1.str());
j++;
}
viewer2->spin();
return 0;
}
可视化结果展示:
提取的平面(颜色随机):
欧式聚类的结果(颜色随机):
写出的点云数据(平面2个,欧式聚类结果5个):
遇到过error C4996: 'pcl::SAC_SAMPLE_SIZE’编译错误的问题
解决方法参考链接:https://blog.csdn.net/lizhengze1117/article/details/86565100
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
using namespace pcl;
using namespace std;
typedef PointXYZ PoinT;
int main(){
//点云的读取*********************************************************
PointCloud::Ptr cloud(new PointCloud);
if (io::loadPCDFile("C:\\Users\\admin\\Desktop\\保留的结果.pcd", *cloud) == -1)
{
PCL_ERROR("read false");
return 0;
}
//欧式聚类*******************************************************
vectorece_inlier;
search::KdTree::Ptr tree(new search::KdTree);
EuclideanClusterExtraction ece;
ece.setInputCloud(cloud);
ece.setClusterTolerance(1);
ece.setMinClusterSize(100);
ece.setMaxClusterSize(20000000000000);
ece.setSearchMethod(tree);
ece.extract(ece_inlier);
//聚类结果展示***************************************************
PointCloud::Ptr ext_cloud(new PointCloud);
ExtractIndicesext;
ext.setInputCloud(cloud);
visualization::PCLVisualizer::Ptr viewer2(new visualization::PCLVisualizer("Result of EuclideanCluster"));
srand((unsigned)time(NULL));
int j = 0;
vectorcolor;
for (int i_segment = 0; i_segment < ece_inlier.size(); i_segment++)
{
color.push_back(static_cast(rand() % 256));
color.push_back(static_cast(rand() % 256));
color.push_back(static_cast(rand() % 256));
}
int color_index = 0;
PointCloud::Ptr color_point(new PointCloud);
for (int i_seg = 0; i_seg < ece_inlier.size(); i_seg++)
{
int clusters_size = ece_inlier[i_seg].indices.size();
for (int i_idx = 0; i_idx < clusters_size; i_idx++)
{
PointXYZRGB point;
point.x = cloud->points[ece_inlier[i_seg].indices[i_idx]].x;
point.y = cloud->points[ece_inlier[i_seg].indices[i_idx]].y;
point.z = cloud->points[ece_inlier[i_seg].indices[i_idx]].z;
point.r = color[3 * color_index];
point.g = color[3 * color_index + 1];
point.b = color[3 * color_index + 2];
color_point->push_back(point);
}
color_index++;
}
viewer2->addPointCloud(color_point);
viewer2->spin();
return 0;
}
————————————————
版权声明:本文为CSDN博主「起个名字费劲死了」的原创文章,遵循CC 4.0 BY-SA版权协议,转载请附上原文出处链接及本声明。
原文链接:https://blog.csdn.net/qq_40335930/article/details/91982640