从零开始学自动驾驶(3)——前端里程计之代码优化
此节对应任佬代码tag5.0
在上一节的front_end_node节点中,代码依旧很长,回顾一下,大致是这个样子

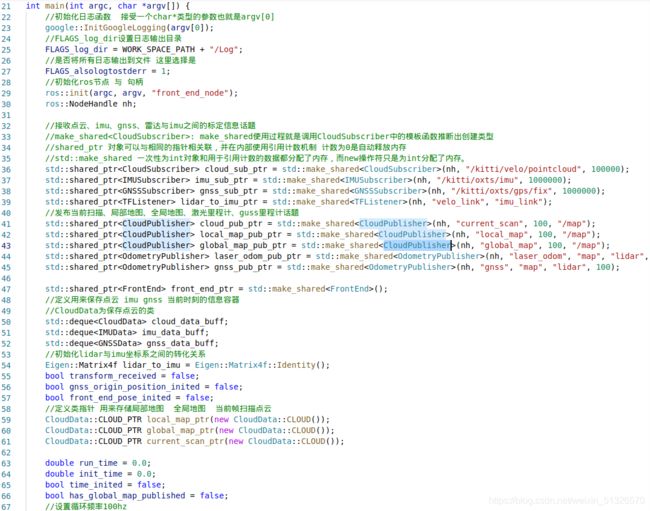 emmmmm其实也还好,下面是,简化后的节点代码:
emmmmm其实也还好,下面是,简化后的节点代码:
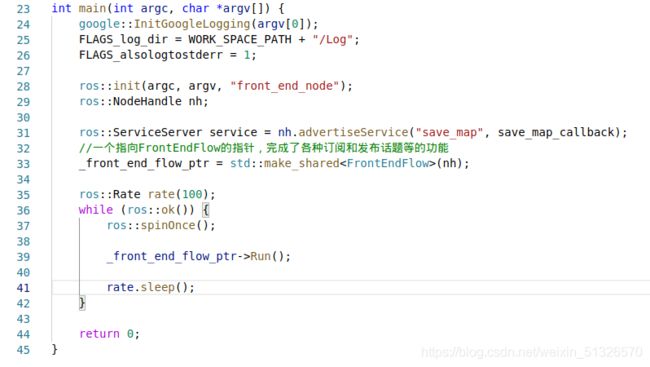
把各个部分进行封装,使整个代码看起来更加清晰和简洁,也更有利于我们对各个模块进行扩展和替换对比。。
保存全局地图模块
//接受存储地图信息
ros::ServiceServer service = nh.advertiseService("save_map", save_map_callback);
回调函数
bool save_map_callback(saveMap::Request &request, saveMap::Response &response) {
response.succeed = _front_end_flow_ptr->SaveMap();
_front_end_flow_ptr->PublishGlobalMap();
return response.succeed;
}
SaveMap()函数用于保存全局地图具体实现
bool FrontEnd::SaveMap() {
//重置全局地图
global_map_ptr_.reset(new CloudData::CLOUD());
std::string key_frame_path = "";
//定义保存关键帧点云和转化位置后点云的类指针
CloudData::CLOUD_PTR key_frame_cloud_ptr(new CloudData::CLOUD());
CloudData::CLOUD_PTR transformed_cloud_ptr(new CloudData::CLOUD());
//
for (size_t i = 0; i < global_map_frames_.size(); ++i) {
//建立保存位置和pcd文件
key_frame_path = data_path_ + "/key_frames/key_frame_" + std::to_string(i) + ".pcd";
//把关键帧保存置pcd文件中
pcl::io::loadPCDFile(key_frame_path, *key_frame_cloud_ptr);
//把关键帧转化到到地图坐标系上,完成地图拼接,并保存
pcl::transformPointCloud(*key_frame_cloud_ptr,
*transformed_cloud_ptr,
global_map_frames_.at(i).pose);
*global_map_ptr_ += *transformed_cloud_ptr;
}
//建立地图map.pcd文件用于保存全局地图
std::string map_file_path = data_path_ + "/map.pcd";
//全局地图导入到map.pcd文件中
pcl::io::savePCDFileBinary(map_file_path, *global_map_ptr_);
has_new_global_map_ = true;
return true;
}
保存局部地图和关键帧模块
bool FrontEnd::UpdateWithNewFrame(const Frame& new_key_frame) {
// 把关键帧点云存储到硬盘里,节省内存 全局地图由关键帧组成,所以全局地图的大小就是关键帧的数量
std::string file_path = data_path_ + "/key_frames/key_frame_" + std::to_string(global_map_frames_.size()) + ".pcd";
//把关键帧存入建立的pcd文件中
pcl::io::savePCDFileBinary(file_path, *new_key_frame.cloud_data.cloud_ptr);
Frame key_frame = new_key_frame;
// 这一步的目的是为了把关键帧的点云保存下来
// 由于用的是共享指针,所以直接复制只是复制了一个指针而已
// 此时无论你放多少个关键帧在容器里,这些关键帧点云指针都是指向的同一个点云
//简单点说就是这个指针指向点云里的点云
key_frame.cloud_data.cloud_ptr.reset(new CloudData::CLOUD(*new_key_frame.cloud_data.cloud_ptr));
CloudData::CLOUD_PTR transformed_cloud_ptr(new CloudData::CLOUD());
// 更新局部地图
local_map_frames_.push_back(key_frame);
//局部地图大于一定数量,去除以前的数据
while (local_map_frames_.size() > static_cast<size_t>(local_frame_num_)) {
local_map_frames_.pop_front();
}
local_map_ptr_.reset(new CloudData::CLOUD());
//更新局部点云
for (size_t i = 0; i < local_map_frames_.size(); ++i) {
//点云转化到局部坐标系下,进行拼接
pcl::transformPointCloud(*local_map_frames_.at(i).cloud_data.cloud_ptr,
*transformed_cloud_ptr,
local_map_frames_.at(i).pose);
*local_map_ptr_ += *transformed_cloud_ptr;
}
has_new_local_map_ = true;
// 更新ndt匹配的目标点云
// 关键帧数量还比较少的时候不滤波,因为点云本来就不多,太稀疏影响匹配效果
if (local_map_frames_.size() < 10) {
registration_ptr_->SetInputTarget(local_map_ptr_);
} else {
//对点云进行滤波操作,在存储到容器中作为待匹配点云
CloudData::CLOUD_PTR filtered_local_map_ptr(new CloudData::CLOUD());
local_map_filter_ptr_->Filter(local_map_ptr_, filtered_local_map_ptr);
registration_ptr_->SetInputTarget(filtered_local_map_ptr);
}
// 保存所有关键帧信息在容器里
// 存储之前,点云要先释放,因为已经存到了硬盘里,不释放也达不到节省内存的目的
key_frame.cloud_data.cloud_ptr.reset(new CloudData::CLOUD());
global_map_frames_.push_back(key_frame);
return true;
}
订阅数据、发布数据模块
调用FrontEndFlow类中FrontEndFlow(ros::NodeHandle& nh)函数
//一个指向FrontEndFlow的指针,完成了各种订阅和发布话题等的功能
_front_end_flow_ptr = std::make_shared<FrontEndFlow>(nh);
此函数完成如下功能:
FrontEndFlow::FrontEndFlow(ros::NodeHandle& nh) {
//接收点云、imu、GNSS、雷达IMU外参标定数据
cloud_sub_ptr_ = std::make_shared<CloudSubscriber>(nh, "/kitti/velo/pointcloud", 100000);
imu_sub_ptr_ = std::make_shared<IMUSubscriber>(nh, "/kitti/oxts/imu", 1000000);
gnss_sub_ptr_ = std::make_shared<GNSSSubscriber>(nh, "/kitti/oxts/gps/fix", 1000000);
lidar_to_imu_ptr_ = std::make_shared<TFListener>(nh, "velo_link", "imu_link");
//发布点云、局部地图、全局地图、激光里程计、GNSS里程计数据
cloud_pub_ptr_ = std::make_shared<CloudPublisher>(nh, "current_scan", 100, "/map");
local_map_pub_ptr_ = std::make_shared<CloudPublisher>(nh, "local_map", 100, "/map");
global_map_pub_ptr_ = std::make_shared<CloudPublisher>(nh, "global_map", 100, "/map");
laser_odom_pub_ptr_ = std::make_shared<OdometryPublisher>(nh, "laser_odom", "map", "lidar", 100);
gnss_pub_ptr_ = std::make_shared<OdometryPublisher>(nh, "gnss", "map", "lidar", 100);
front_end_ptr_ = std::make_shared<FrontEnd>();
//重置局部地图、全局地图、当前帧扫描信息
local_map_ptr_.reset(new CloudData::CLOUD());
global_map_ptr_.reset(new CloudData::CLOUD());
current_scan_ptr_.reset(new CloudData::CLOUD());
}
整体运行流程
开始运行整个流程:
//开始运行整个流程
_front_end_flow_ptr->Run();
_front_end_flow_ptr 现在是指向 FrontEndFlow 类的指针,下面看一下run()的实现流程,run()函数会逐步调用下面的函数
bool FrontEndFlow::Run() {
//读取数据
ReadData();
//读取标定信息
if (!InitCalibration())
return false;
//初始化GNSS
if (!InitGNSS())
return false;
//判断数据是否有效
while(HasData()) {
if (!ValidData())
continue;
//更新GNSS里程计信息
UpdateGNSSOdometry();
//更新激光里程计信息并发布
if (UpdateLaserOdometry())
PublishData();
}
return true;
}
每一部分均与上一节类似。。
读取数据
//读取数据,把数据保存在cloud_data_buff_中
bool FrontEndFlow::ReadData() {
cloud_sub_ptr_->ParseData(cloud_data_buff_);
imu_sub_ptr_->ParseData(imu_data_buff_);
gnss_sub_ptr_->ParseData(gnss_data_buff_);
return true;
}
读取imu坐标系相对于雷达的坐标变换
bool FrontEndFlow::InitCalibration() {
static bool calibration_received = false;
if (!calibration_received) {
if (lidar_to_imu_ptr_->LookupData(lidar_to_imu_)) {
calibration_received = true;
}
}
return calibration_received;
}
初始化GNSS,第一帧来作为初始坐标
bool FrontEndFlow::InitGNSS() {
static bool gnss_inited = false;
if (!gnss_inited && gnss_data_buff_.size() > 0) {
GNSSData gnss_data = gnss_data_buff_.front();
gnss_data.InitOriginPosition();
gnss_inited = true;
}
return gnss_inited;
}
判断三个数据容器中是否存在信息
bool FrontEndFlow::HasData() {
if (cloud_data_buff_.size() == 0)
return false;
if (imu_data_buff_.size() == 0)
return false;
if (gnss_data_buff_.size() == 0)
return false;
return true;
}
提取有效点,对雷达、imu、GNSS做时间同步
bool FrontEndFlow::ValidData() {
current_cloud_data_ = cloud_data_buff_.front();
current_imu_data_ = imu_data_buff_.front();
current_gnss_data_ = gnss_data_buff_.front();
double d_time = current_cloud_data_.time - current_imu_data_.time;
if (d_time < -0.05) {
cloud_data_buff_.pop_front();
return false;
}
if (d_time > 0.05) {
imu_data_buff_.pop_front();
gnss_data_buff_.pop_front();
return false;
}
cloud_data_buff_.pop_front();
imu_data_buff_.pop_front();
gnss_data_buff_.pop_front();
return true;
}
更新GNSS里程计信息
bool FrontEndFlow::UpdateGNSSOdometry() {
gnss_odometry_ = Eigen::Matrix4f::Identity();
//将经度、纬度、高度信息转化为东北天坐标系下的E N U
current_gnss_data_.UpdateXYZ();
gnss_odometry_(0,3) = current_gnss_data_.local_E;
gnss_odometry_(1,3) = current_gnss_data_.local_N;
gnss_odometry_(2,3) = current_gnss_data_.local_U;
gnss_odometry_.block<3,3>(0,0) = current_imu_data_.GetOrientationMatrix();
gnss_odometry_ *= lidar_to_imu_;//imu相对于雷达位姿变换
return true;
}
更新激光里程计信息
bool FrontEndFlow::UpdateLaserOdometry() {
static bool front_end_pose_inited = false;
//如果没有初始化,以GNSS第一帧数据进行初始化
if (!front_end_pose_inited) {
front_end_pose_inited = true;
front_end_ptr_->SetInitPose(gnss_odometry_);
//GNSS作为激光历程计的初始化
laser_odometry_ = gnss_odometry_;
return true;
}
laser_odometry_ = Eigen::Matrix4f::Identity();
if (front_end_ptr_->Update(current_cloud_data_, laser_odometry_))
return true;
else
return false;
}
发布数据
bool FrontEndFlow::PublishData() {
//发布GNSS、激光里程计数据
gnss_pub_ptr_->Publish(gnss_odometry_);
laser_odom_pub_ptr_->Publish(laser_odometry_);
//发布当前帧扫描数据
front_end_ptr_->GetCurrentScan(current_scan_ptr_);
cloud_pub_ptr_->Publish(current_scan_ptr_);
//发布局部地图数据
if (front_end_ptr_->GetNewLocalMap(local_map_ptr_))
local_map_pub_ptr_->Publish(local_map_ptr_);
return true;
}
保存地图
bool FrontEndFlow::SaveMap() {
return front_end_ptr_->SaveMap();
}
发布全局地图
bool FrontEndFlow::PublishGlobalMap() {
if (front_end_ptr_->GetNewGlobalMap(global_map_ptr_)) {
global_map_pub_ptr_->Publish(global_map_ptr_);
global_map_ptr_.reset(new CloudData::CLOUD());
}
return true;
}
}
似乎感觉截图的方式看起来比较舒服一些,后面的文章打算多以截图的方式给出
匹配模块
我们可以先定义一个匹配函数的基类,然后定义 匹配算法 NDT 的子类,这样后面我们更换匹配算法的时候,重新定义一个新子类即可
基类:
 NDT子类
NDT子类
在使用过程中,我们可以直接用基类的指针指向子类来进行函数调用
 下面一起看看调用匹配算法的流程是如何进行的
下面一起看看调用匹配算法的流程是如何进行的
首先在更新激光里程计的大步骤中:

然后在Update函数下:
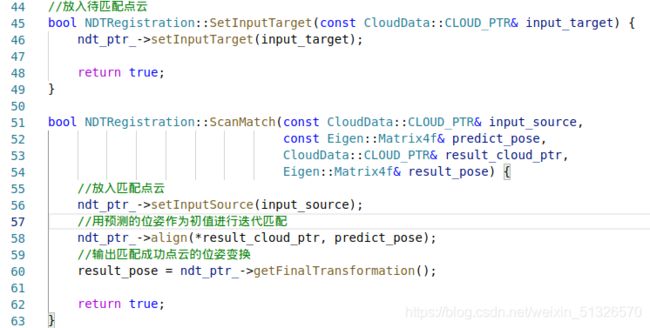
 最后调用ndt:
最后调用ndt:
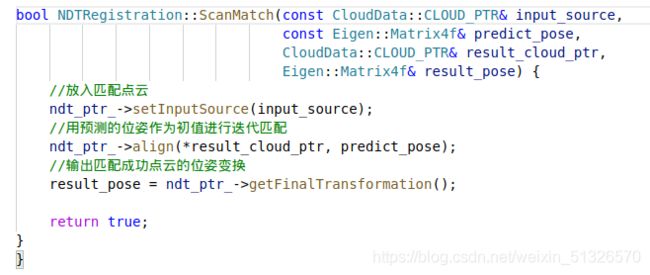
中间一个小问题找了好长时间,没有发现程序在哪里调用的子类匹配算法,也就是InitRegistration函数,然后找阿找阿

到这里还是很蒙阿,那咋调用的 FrontEnd( ) 呢?? 然后复习了一下多态知识,发现类被调用的时候,默认构造函数会运行,豁然开朗:front_end_ptr = std::make_shared(); 这句当时就不知道干嘛的,原来是 指针指向类时,make_shared()调用了类的默认构造函数。

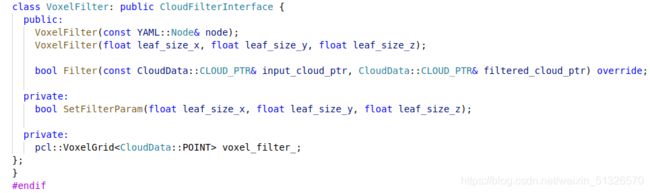
滤波模块
滤波模块与ndt模块类似
滤波基类
 滤波子类
滤波子类
 滤波调用
滤波调用
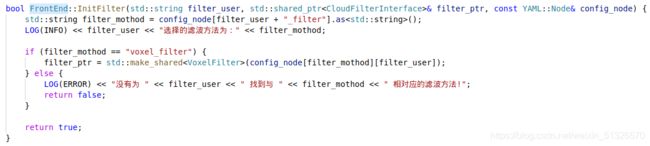
滤波实现

配置文件
为了方便调试,把常用的参数写在配置文件里是必须的,主要为yaml格式,先看一下文件中的主要内容:
 首先找到yaml文件位置,然后配置一个节点来调用文件中内容:
首先找到yaml文件位置,然后配置一个节点来调用文件中内容:

调用配置文件
![]()

![]()
。。。。。。