Apollo学习
Apollo入门
安装
内存尽量大,100G + ,交换空间也要大一些16G,或者12G,按照教程流程基本可以安装好。
文档学习
基本框架
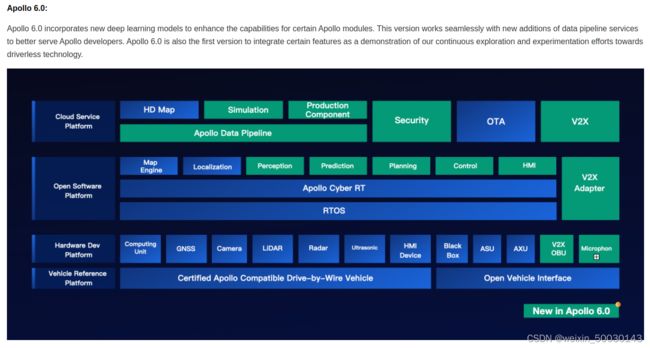

主要包括四个部分:最底层的车辆认证平台,往上一层的硬件开发平台,第三层的核心开源软件平台以及最上层的云服务层。
Ubuntu 18.04安装Apollo 6.0:从零开始到启动Demo(超多细节)
一、云端服务平台(Cloud Service Platform)
包括高精地图(HD Map);仿真服务(Simulation);量产服务组件(Production component);Apollo数据管道(Apollo data Pipeline);安全(Security);OTA(空中下载技术),通过移动通信的接口实现对软件进行远程管理,传统的做法到4S店通过整车OBD对相应的ECU进行软件升级。);V2X(Vehicle-to-Everything,车路协同),根据不同的协同要素,V2X主要分为车与车之间(V2V)、车与路之间(V2I)、车与人之间(V2P)、车与网络之间(V2N)四大应用版块。
二、开源软件平台
总体框架

核心开源软件层又可以细分为三层:
最下面的是RTOS实时操作系统,在Apollo中,我们使用打补丁的方式来实现实时的效果。
运行时框架:是Apollo的操作环境,是ROS的定制版即机器人操作系统。为了使ROS适应无人车,Apollo团队改进了共享内存的功能和性能、去中心化和数据兼容性。
应用程序模块层(框架为Apollo Cyber RT):Apollo软件平台具有各种模块,这些模块包括 MAP引擎、定位、感知、规划、控制、端到端驾驶以及人机接口(HMI)。每个模块都有自己的算法库。
代码结构
代码结构
结构
Apollo Cyber RT
常用术语

开发工具
- 可视化工具
cyber_visualizer - 命令行工具
cyber_monitor和cyber_recorder
运行:
1.前提:安装环境,
source /apollo/cyber/setup.bash
2.然后:并进入docker容器
cd apollo
bash docker/scripts/dev_start.sh
bash docker/scripts/dev_into.sh
3.下载数据包
#下载
wget https://apollo-system.cdn.bcebos.com/dataset/6.0_edu/demo_sensor_data.tar.xz
#解压
tar -xvf demo_sensor_data.tar.xz

4.运行cyber_recorder
cyber_recorder play -f /path/to/your_record
#此处
cyber_recorder play -f sensor_rgb.record -loop
打开新的终端,注意:进入另个容器的时候,不能再dev_start.sh,只用dev_into.sh就可
5.查看channel数据
cyber_monitor
步骤五:运行Cyber_visualizer
重新打开一个终端,在 Apollo Docker 环境中执行如下命令运行 cyber_visualizer:
cyber_visualizer
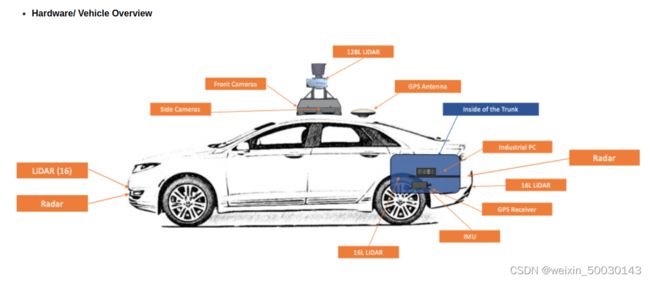
三、硬件开发平台

四、车辆认证平台
编译
四个步骤:
- 预处理
- 编译
- 汇编
- 链接
bazel编译
bazel优势:精细,对依赖的管理更好。
bazel文件类型:
-
WORKSPACE :bazel相对根目录,工作区存放了所有源代码和Bazel编译输出的文件。
Bazel工程的根目录下,必须包含一个文件名为Workspace的文件,它用来指明构建的根目录,Workspace采用类似于Python的语法。
Workspace下包含多个Package,而每个Package又包含多个编译目标Target。 -
BUILD: 编译文件,文章理解
cc_library,cc_binary, cc_test 三种规则 -
.bzl:rules文件,bazel扩展
-
.bazelrc:配置文件,可指定
-
bazelignore:忽略的目录
一个 bazel demo网址
依赖非bazel文件的方法:
- 添加local repository,git repository or http archive
在本地的WORKSPACE中
local_repository
(
name= "coworkers_project",
path=" ",
)
- 带new_前缀的规则,比如,new_local_repository
new_local_repository(
build_file ="Myworker.BUILD",
#build_file指定要在现有项目上叠加BUILD文件
- 编译成so后缀的文件,比如引用OpenCV的库之类的,
cc_libary(
name="mylib",
srcs=["mylib.so"],
hdrs=["mylib.h"],
)
#可通过@mylib来引用
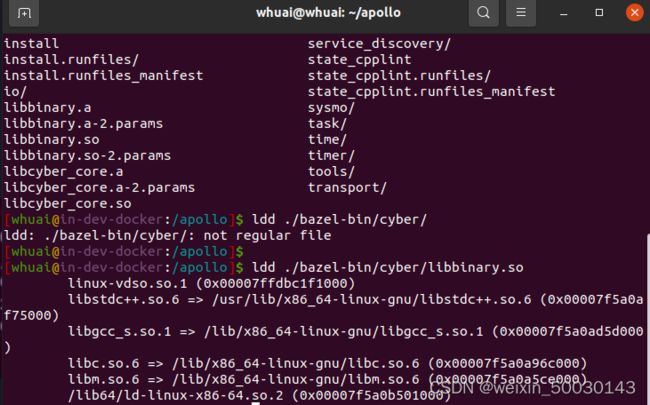
链接
分为动态库和静态库,动态库用的多,后缀是.so。
使用命令ldd 可以查看动态库的链接。
启动Cyber_RT(默认情况下,cyber的日志信息是写出到磁盘文件中,并不会在终端输出,为了方便查看运行结果,我们需要修改cyber的配置文件,使其能够将日志消息输出到终端上)
进入容器and Cyber_RT
第一步:启动docker容器
cd apollo
bash docker/scripts/dev_start.sh
第二步:进入docker
bash docker/scripts/dev_into.sh
第三步 修改文件
vim cyber/setup.bash
#参数GLOG_alsologtostderr的默认值为0,修改为1
#加载资源
source setup.bash
第四步:编译cyber
./apollo.sh build
or
bazel build cyber
生成了bazel-bin/文件夹

Docker
个人理解
Docker解决的问题就是环境的问题。一个比方,docker把操作系统,代码,配置全部放到集装箱里。再打包放到鲸鱼上,由鲸鱼给我们送到服务器上,在我的机器上怎么运行,在别的机器上也怎么运行。不会有任何的问题。
常用命令
docker pull
docker push
docker stop
docker restart
docker run
docker ps:列出容器
docker start
docker stop
docker restart
docker run

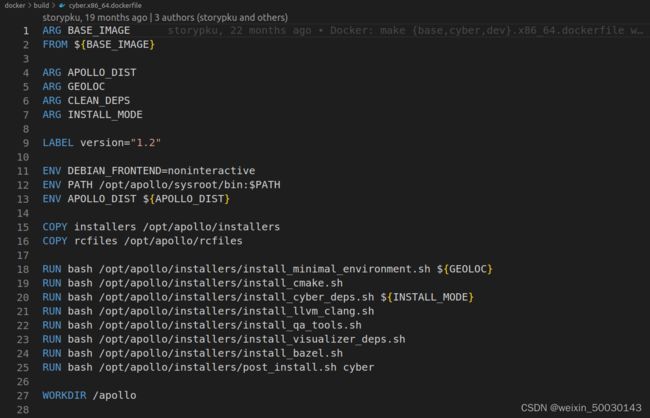
制作docker镜像
Dokerfile:通过编译dockerfile可以用来制作docker容器
docker build -f dockerfile -t tag