m基于可见光通信系统的RFID接口过程以及ALOHA防碰撞算法的matlab仿真
目录
1.算法描述
2.matlab算法仿真效果
3.MATLAB核心程序
4.完整MATLAB
1.算法描述
射频识别技术(Radio Frequency Identification,RFID)是一种非接触式自动识别技术,与传统的识别方式相比,它无需直接接触、无需光学可视、无需人工干预即可完成信息输入和处理,具有操作方便快捷、存储数据量大、保密性好、反应时间短、对环境适应性强等优点,现在已广泛应用于工业自动化、商业自动化和交通运输管理等领域,成为当前IT业研究的热点技术之一。
典型的RFID系统主要包括三个部分:电子标签(tag)、读写器(Read)和应用系统(如图1)。电子标签放置在被识别的对象上,是RFID系统真正的数据载体。通常电子标签处于休眠状态,一旦进入读写器作用范围内就会被激活,并与读写器进行无线射频方式的非接触式双向数据通信,以达到识别并交换数据的目的。此外,许多读写器还都有附加的通信接口,以便将所获的数据传给应用系统进行进一步的处理。
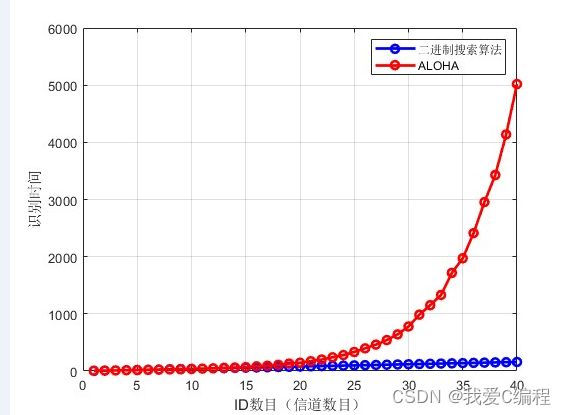
对具有多个上传信道可同时上传ID信息的RFID 系统的空中接口过程进行仿真, 探讨系统识别标签的速率与信道数的关系,并与现有标准ISO,18000-6C的识别速率进行对比RFID 系统的空中接口过程, 当多个上传信道同时上传ID的时候,那么必然会涉及到多个信道之间的干扰,那么信道数目越多,这种相互干扰的就越严重,从而影响对不同上传ID识别速率,所以我们需要研究多信道和识别速度的关系。根据上面内容,需要研究两个方面的东西,一个接口过程,一个防碰撞算法。
RFID的接口过程满足如下的结构框图: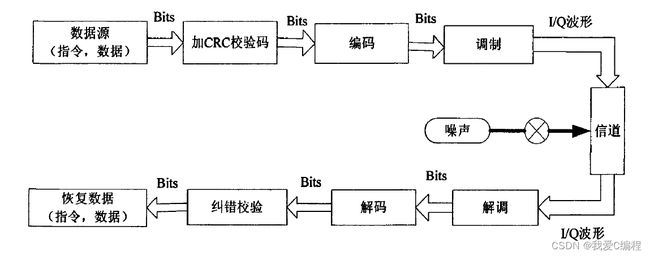
关于防碰撞算法:
进行多种算法的对比:设置不同的ID数量,然后分别仿真其对应的识别时间,即速率,然后做出仿真图。包括二进制搜索算法。标准ISO,18000-6C用的是ALOHA算法。
“Aloha算法是一种非常简单的TDMA算法,该算法被广泛应用在RFID系统中。这种算法多采取“标签先发言”的方式,即标签一进入读写器的阅读区域就自动向读写器发送其自身的ID,随即标签和读写器间开始通信。
ALOHA算法是随机接入算法的一种,当标签要发送数据信息时,它可以在任意时间段随机发送,把它称为纯ALOHA算法。
2.matlab算法仿真效果
matlab2022a仿真结果如下:



3.MATLAB核心程序
%%
%参数定义
%信息码长度
SNR = [10:1:17];
TDL = [500,400,300,200,100,50,20,10];
ERR = zeros(1,length(SNR));
for jj = 1:length(SNR)
jj
Num = 0;
Ber = 0;
while Ber <= TDL(jj);
Num = Num + 1;
Ber
Frame_length = 10*64;
%信息码速率为10KHz
Rates = 10e3;
%发送带宽20KHz
Bwidth = 2*Rates;
%发送信号功率2W
Tpower = 2;
%载波频率70MHz
fc = 70e6;
%采样频率280MHz,满足四倍采样
fs = fc*4;
%20KHz方波
Swave1 = 20e3;
%40KHz方波
Swave2 = 40e3;
%采样点数
M = fs/(2*Swave2);
%信息码采样点
L = fs/Rates;
%2ASK调制的调制度
ma = 0.5;
%alpha值
alpha = 2*ma/(1-ma);
%%
%随机信息码产生
data_code0 = zeros(1,Frame_length);
%随机产生信息码
data_code0 =(randn(1,Frame_length)>=0.5);
%%
%CRC校验
data_code = func_CRC(data_code0);
%%
%数据采样化
data_code_sample = func_samples(data_code,Frame_length,L);
%%
%编码
data_code_sample = func_encode(data_code_sample,data_code,Frame_length,L,M);
%%
%调制发送
%FIR低通滤波器设计
data_sample_fir = func_filter(data_code_sample,fs,fc);
T = Frame_length*L*(1/fs);
t = [0:1/fs:T-(1/fs)];
Carriers = cos(2*pi*fc*t);
%ASK调制
RFID_ASK =((2*Tpower).^0.5)*(1+alpha*data_sample_fir).*Carriers;
%ASK调制信号加正弦波干扰
RFID_ASK_sin = RFID_ASK + 10*cos(2*pi*fc*t+pi/6);
%高斯信道
snr = SNR(jj);
RFID_ASK_sin_N = awgn(RFID_ASK_sin,snr,'measured');
figure(1);
subplot(221)
plot(RFID_ASK(100:1000));
title('2ASK调制信号');
axis([0,1000,-10,10]);
subplot(222)
plot(RFID_ASK_sin(100:1000));
grid on;
title('ASK调制信号加正弦波干扰');
axis([0,1000,-30,30]);
subplot(223)
plot(RFID_ASK_sin_N(100:1000));
grid on;
title('过信道之后信号');
axis([0,1000,-30,30]);
%限幅
AMP = 10;
RFID_ASK_sin_N_amp = func_amp_limit(RFID_ASK_sin_N,AMP);
%ASK解调
[RFID_deASK_filter,amp]=func_AKS_Demod(RFID_ASK_sin_N_amp,Carriers,fc,fs);
subplot(224)
plot(RFID_deASK_filter(100:end));
grid on;
title('2ASK解调信号');
axis([0 L*Frame_length -5 20]);
%判决门限
RFID_deASK10 = func_unsamples(amp,Frame_length,M);
%解码
data_code_rec = func_decode(RFID_deASK10,Frame_length);
%统计误码率
Err_rate = func_err(data_code_rec,data_code,Frame_length);
Ber = Ber + Err_rate*Frame_length;
end
ERR(jj) = Ber/(Num*Frame_length);
end
figure;
semilogy(SNR,ERR,'b-o');
xlabel('SNR');
ylabel('BER');
grid on;
01_094_m4.完整MATLAB
V
V