ROS(二)自定义话题消息
ROS(二)自定义话题消息
一
在src下创建msg文件夹,和消息有关的文件全部放在msg文件夹下,在msg下使用命令touch Person.msg创建文件
person.msg内容如下自定义话题消息_第1张图片](http://img.e-com-net.com/image/info8/2d18ba97a2c743e8be77f97939ad62f2.jpg)
二 在package.xml中添加功能包依赖
放在这个位置

三 在CMakeLists.txt里添加内容

在这里添加一个message_generation
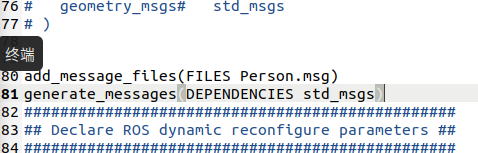
在这里添加这两句
add_message_files(FILES Person.msg)
generate_messages(DEPENDENCIES std_msgs)

把这里改成这样
四 编译
回到工作空间根目录下使用catkin_make进行编译,然后去根目录下devel/include下可以看到一个Person.h就是编译生成的


五 调用Person.h
5.1
在learning_topic/src中创建两个cpp文件
person_publisher.cpp
/**
* 该例程将发布/person_info话题,自定义消息类型learning_topic::Person
*/
#include person_subscriber.cpp
/**
* 该例程将订阅/person_info话题,自定义消息类型learning_topic::Person
*/
#include 5.2
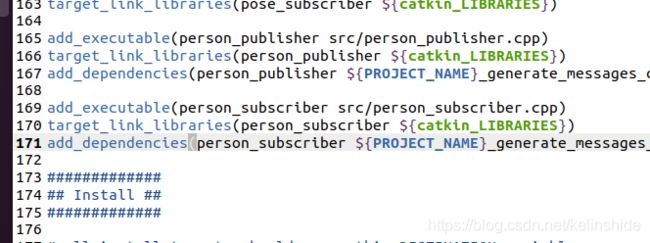
add_executable(person_publisher src/person_publisher.cpp)
target_link_libraries(person_publisher ${catkin_LIBRARIES})
add_dependencies(person_publisher ${PROJECT_NAME}_generate_messages_cpp)
add_executable(person_subscriber src/person_subscriber.cpp)
target_link_libraries(person_subscriber ${catkin_LIBRARIES})
add_dependencies(person_subscriber ${PROJECT_NAME}_generate_messages_cpp)
放在learning_topic/CMakeLists.txt下这个位置
5.3
再次回到根目录下使用catkin_make进行编译
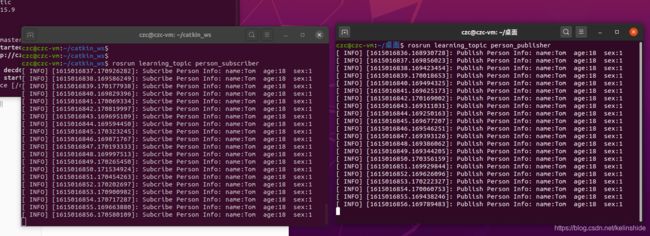
再次roscore
再开一个终端rosrun learning_topic person_subscriber
再开一个rosrun learning_topic person_publisher
效果如下