ROS自定义话题消息
自定义话题消息
-
- 定义msg文件
- 添加功能包的依赖
- 如何使用自定义话题消息
定义msg文件
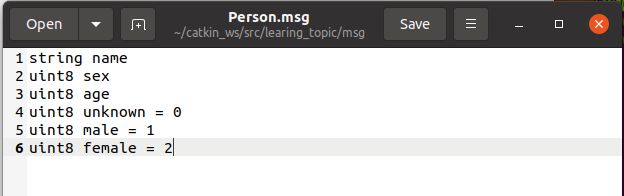
在catkin_ws/src/中相应功能包下创建文件夹msg,该文件用于存储.msg文件,注意此文件是与编程语言无关的。/.msg文件中的内容相当于是宏定义。
byw@byw-virtual-machine:~/catkin_ws/src/learing_topic/msg$ touch Person.msg
下列代码中的string 、uint8这些表示的是需要在不同的编程语言中扩展成相应语言可以使用的数据类型,而这个过程是在执行编译时进行的。所以需要根据这是数据接口设置一些编译规则。
string name
uint8 sex
uint8 age
uint8 unknown = 0
uint8 male = 1
uint8 female = 2
添加功能包的依赖
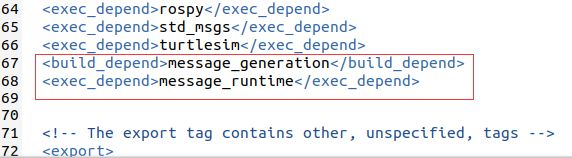
在package.xml中添加功能包依赖。分别添加一个编译依赖包message_generation和一个执行依赖包message_runtime。
<build_depend>message_generation</build_depend>
<exec_depend>message_runtime</exec_depend>
第一,因为在package.xml中添加了一个依赖包,而在创建功能包时后面跟的依赖包不仅在package.xml中还在CMakeLists.txt中,所以还要添加到CMakeLists.txt中。
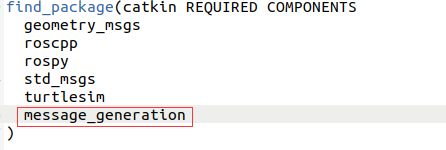

第二,前面讲到需要将/.msg文件编译成对应的不同文件配置项。
add_message_files是把定义的Person.msg作为编译接口,然后编译的时候针对该文件去编译;
generate_messages是在编译Person.msg时需要哪些ros已有的包,这里需要std_msgs,上文提到的string,uint8都是这里面定义的。
add_message_files(FILES Person.msg)
generate_messages(DEPENDENCIES std_msgs)

回到工作空间根目录进行编译,可以在编译文件夹./devel/include中查看编译产生的代码文件。注意要在编译成功后才有该c++头文件。

如何使用自定义话题消息
C++:person_publisher.cpp
/**
* 该例程将发布/person_info话题,自定义消息类型learning_topic::Person
*/
#include person_subscriber.cpp
**
* 该例程将订阅/person_info话题,自定义消息类型learning_topic::Person
*/
#include 由于是.cpp文件需要编译后才可以执行,所以添加编译配置。
• 设置需要编译的代码和生成的可执行文件;
• 设置链接库(执行编译生成的可执行文件时需要的库);
• 添加依赖项(由于有些代码时动态生成的,所以可执行文件也要和刚才动态生成的头文件链接)。
add_executable(person_publisher src/person_publisher.cpp)
target_link_libraries(person_publisher ${catkin_LIBRARIES})
add_dependencies(person_publisher ${PROJECT_NAME}_generate_messages_cpp)
add_executable(person_subscriber src/person_subscriber.cpp)
target_link_libraries(person_subscriber ${catkin_LIBRARIES})
add_dependencies(person_subscriber ${PROJECT_NAME}_generate_messages_cpp)

在编译完成后,就可执行两个节点了。但不要忘记在rosrun之前需要roscore.
roscore
