一文读懂特征值分解EVD与奇异值分解SVD
这篇关于特征值和特征向量的内容是我用PCA的时候接触到的,本科学的东西早就记不得了orz,所以复习了一遍顺便做了一下梳理,这算是PCA的前置知识。
特征值分解
特征值与特征向量
设 A A A 是 n n n 阶矩阵, 如果数 λ \lambda λ 和 n n n 维非零列向量 x x x 使关系式
A x = λ x A x=\lambda x Ax=λx成立,那么 λ \lambda λ 就称为矩阵 A A A 的特征值, x x x 称为 A A A的对应于特征 值 λ \lambda λ 的特征向量。
注意有两个要素:(1) A A A是方阵(2) x x x是非零向量
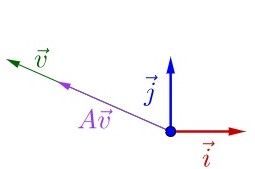
我们都知道左乘矩阵代表的是线性变换,上述定义从几何来理解就是:向量 x x x 经过 A A A变换后,它的方向没有变(可能会相反),而大小变为 λ \lambda λ倍。这是一种很特殊的情况,你想变换后的向量形式千千万,唯独某类向量会保持住它的方向不变,而只改变其长度,这类向量对 A A A来说是及其特殊的存在,所以我们可以认为矩阵 A A A的特征可以由这些特征值和对应的特征向量所体现(这可能是“特征”两字的由来)。
定义可以写成: ( A − λ E ) x = 0 (A-\lambda E) x=0 (A−λE)x=0这是一个齐次线性方程组,它有非零解的充分必要条件是系数行列式等于0,也就是 ∣ A − λ E ∣ = 0 |A-\lambda E|=0 ∣A−λE∣=0这个式子化简以后是以 λ \lambda λ 为未知数的一元 n n n 次方程,称为矩阵 A A A 的特征方程,它有 n n n个解(重根解算多个),这些解就是矩阵 A A A的特征值,求出特征值再带回到第二个式子中就可以得到对应的特征值 x x x。
关于这 n n n个解,有三种情况
- 存在复数解
- 都是实数解,但存在重根
- 都是互异实数解
下文都不考虑复数解的情况,先举个求特征值和特征向量的例子:
求矩阵 A = ( 3 − 1 − 1 3 ) A=\left(\begin{array}{rr}3 & -1 \\ -1 & 3\end{array}\right) A=(3−1−13) 的特征值和特征问量
特征多项式为:
∣ A − λ E ∣ = ∣ 3 − λ − 1 − 1 3 − λ ∣ = ( 3 − λ ) 2 − 1 = 8 − 6 λ + λ 2 = ( 4 − λ ) ( 2 − λ ) |A-\lambda E|=\left|\begin{array}{cc}3-\lambda & -1 \\ -1 & 3-\lambda\end{array}\right|=(3-\lambda)^{2}-1=8-6 \lambda+\lambda^{2}=(4-\lambda)(2-\lambda) ∣A−λE∣=∣∣∣∣3−λ−1−13−λ∣∣∣∣=(3−λ)2−1=8−6λ+λ2=(4−λ)(2−λ)所以 A 的特征值为 λ 1 = 2 , λ 2 = 4 \lambda_{1}=2, \lambda_{2}=4 λ1=2,λ2=4,当 λ 1 = 2 \lambda_{1}=2 λ1=2 时, 对应的特征向量应满足
( 3 − 2 − 1 − 1 3 − 2 ) ( x 1 x 2 ) = ( 0 0 ) \left(\begin{array}{cc} 3-2 & -1 \\ -1 & 3-2 \end{array}\right)\left(\begin{array}{l} x_{1} \\ x_{2} \end{array}\right)=\left(\begin{array}{l} 0 \\ 0 \end{array}\right) (3−2−1−13−2)(x1x2)=(00)即 ( 1 − 1 − 1 1 ) ( x 1 x 2 ) = ( 0 0 ) \left(\begin{array}{rr} 1 & -1 \\ -1 & 1 \end{array}\right)\left(\begin{array}{l} x_{1} \\ x_{2} \end{array}\right)=\left(\begin{array}{l} 0 \\ 0 \end{array}\right) (1−1−11)(x1x2)=(00)解得 p 1 = k ( 1 1 ) ( k ≠ 0 ) p_{1}=k\left(\begin{array}{l} 1 \\ 1 \end{array}\right)(k \neq 0) p1=k(11)(k=0)同理可以求出 λ 2 = 4 \lambda_2=4 λ2=4时对应的特征向量,从这个例子我们可以看到,特征向量是不唯一的。
那么特征值具有哪些性质呢?如下:
- λ 1 + λ 2 + ⋯ + λ n = a 11 + a 22 + ⋯ + a n n \lambda_{1}+\lambda_{2}+\cdots+\lambda_{n}=a_{11}+a_{22}+\cdots+a_{n n} λ1+λ2+⋯+λn=a11+a22+⋯+ann
- λ 1 λ 2 ⋯ λ n = ∣ A ∣ \lambda_{1} \lambda_{2} \cdots \lambda_{n}=|\boldsymbol{A}| λ1λ2⋯λn=∣A∣
- φ ( λ ) \varphi(\lambda) φ(λ) 是 φ ( A ) \varphi(A) φ(A) 的特征值,其中 φ ( λ ) = a 0 + a 1 λ + ⋯ + a m λ m \varphi(\lambda)=a_{0}+a_{1} \lambda+\cdots+a_{m} \lambda^{m} φ(λ)=a0+a1λ+⋯+amλm 是 λ \lambda λ 的多项式 , φ ( A ) = a 0 E + a 1 A + ⋯ + a m A m \varphi(A)=a_{0}E+a_{1} A+\cdots +a_{m} A^m φ(A)=a0E+a1A+⋯+amAm是矩阵 A A A的多项式,由此可以得到两个特殊的,(1) λ k \lambda^{k} λk 是 A k A^{k} Ak 的特征值(2) 1 λ \frac{1}{\lambda} λ1 是 A − 1 \boldsymbol{A}^{-1} A−1 的特征值
- 不同特征值对应的特征向量线性无关
特征值分解
先引入一个相似矩阵的概念,定义,设 A 、 B A、B A、B都是 n n n阶矩阵,若有可逆矩阵 P P P,使
P − 1 A P = B {P}^{-1} {A P}={B} P−1AP=B则称 A A A与 B B B相似,这个过程称为相似变换, P P P称为相似变换矩阵。
它具有一个很重要的性质:相似矩阵的特征值相同
为什么要引入这么一个东西?主要是为了引出相似对角化这个玩意。
特殊的,如果 A A A与对角矩阵 Λ = ( λ 1 λ 2 ⋱ λ n ) \boldsymbol{\Lambda}=\left(\begin{array}{cccc}\lambda_{1} & & & \\ & \lambda_{2} & & \\ & & \ddots & \\ & & & \lambda_{n}\end{array}\right) Λ=⎝⎜⎜⎛λ1λ2⋱λn⎠⎟⎟⎞相似,即 P − 1 A P = Λ {P}^{-1} {A P}={\Lambda} P−1AP=Λ 那么 λ 1 , λ 2 , ⋯ , λ n \lambda_{1}, \lambda_{2}, \cdots, \lambda_{n} λ1,λ2,⋯,λn 是 A {A} A 的 n n n 个特征值(相似矩阵和对角矩阵的性质),而 P P P 的列向量 p i p_i pi 就是 A A A 的对应于特征值 λ i \lambda_i λi的特征向量。
把 P P P乘到右边,得到:
A = P Λ P − 1 A=P \Lambda P^{-1} A=PΛP−1
这个式子就是实际中经常用到的特征值分解,一个矩阵 A A A可以通过特征值分解得到它的特征值和特征向量(numpy有包可以直接调用) ,但是特征分解只适用于方阵,更普遍的是奇异值分解SVD。
import numpy as np
from numpy.linalg import eig
a = np.array([[1, 2, 3],[5, 8, 7],[1, 1, 1]])
e_vals,e_vecs = np.linalg.eig(a)
print(e_vals)
print(e_vecs)
# 注意列向量才是特征向量
[10.254515 -0.76464793 0.51013292]
[[-0.24970571 -0.89654947 0.54032982]
[-0.95946634 0.19306928 -0.73818337]
[-0.13065753 0.39865186 0.40389232]]
从相似对角化的的定义可以看到,我们可以把一个复杂的矩阵 A A A变换成一个很简单的对角矩阵,而这个对角矩阵也同样保留了原来矩阵的特征,且变换的矩阵 P P P就是 A A A的特征向量组成的矩阵,挺神奇!把一个复杂的事物变成具有同样性质的简单事物,进一步我们可以用这个简单的事物代替复杂的事物去做一些操作,从而提高效率或减少复杂度,这在工程上是非常有用的。
但是注意,不是每一个矩阵都能与对角矩阵相似,首先注意到 P P P必须是可逆的,而 P P P又是由特征向量组成,那么换句话说:当且仅当 A A A有 n n n个线性无关的特征向量时, A A A才能相似对角化。由这个定理结合特征值的性质4我们可以得到推论:如 果 n n n 阶 矩 阵 A A A 的 n n n 个特征值互不相等(解的情况3) , 则 A A A 可以相似对角化。
那么哪些不可以相似对角化?解的情况2中,重根对应的特征向量个数小于重数的矩阵,比如矩阵 A = ( − 1 1 0 − 4 3 0 1 0 2 ) A=\left(\begin{array}{rrr}-1 & 1 & 0 \\ -4 & 3 & 0 \\ 1 & 0 & 2\end{array}\right) A=⎝⎛−1−41130002⎠⎞, λ = 1 \lambda=1 λ=1是2重根(另外一个根是2),但是对应的线性无关的特征向量只有一个,所以总体上就只有2个线性无关的特征向量( < 3),故不能相似对角化。
对称矩阵的特征值分解
在可相似对角化的矩阵中,对称矩阵( A T = A A^T=A AT=A)是经常用到,它的性质是:对称矩阵都有 N 个线性无关的特征向量,且不同特征值对应的特征向量相互正交。
由此我们可以知道,对称矩阵一定可以相似对角化,而且可以把些特征向量正交单位化而得到一组正交且模为 1 的向量,故实对称矩阵 A 可被分解成:
A = P Λ P − 1 = P A P T A= P\Lambda P^{-1} = P A P^{\mathrm{T}} A=PΛP−1=PAPT
其中, P P P为正交矩阵( P P T = E PP^T=E PPT=E)
奇异值分解SVD
特征值分解是一个提取矩阵特征很不错的方法,但是它只是对方阵而言的,在现实的世界中,我们看到的大部分矩阵都不是方阵,那么奇异值分解就是一种能适用于任意矩阵分解的方法。
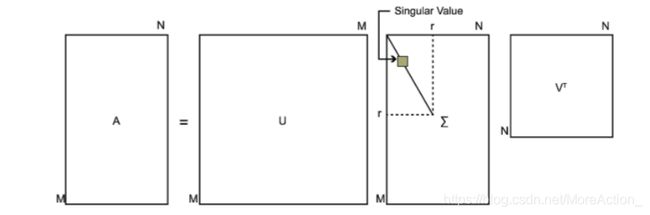
假设矩阵A是一个 m × n m \times n m×n 的矩阵,那么就可以分解为:
A = U Σ V T A=U \Sigma V^{T} A=UΣVT
U: m × m m \times m m×m ,其中的列向量 u ⃗ 1 , u ⃗ 2 , … , u ⃗ m \vec{u}_{1}, \vec{u}_{2}, \ldots, \vec{u}_{m} u1,u2,…,um 是 A A T A A^{T} AAT 的特征向量, 称为矩阵 A A A的左奇异向量。
V: n × n n \times n n×n ,其中的列向量 v ⃗ 1 , v ⃗ 2 , … , v ⃗ m \vec{v}_{1}, \vec{v}_{2}, \ldots, \vec{v}_{m} v1,v2,…,vm 是 A T A A^{T}A ATA 的特征向量, 称为矩阵 A A A的右奇异向量。
Σ \Sigma Σ: m × n m \times n m×n ,除了主对角线上的元素以外全为0, 主对角线上的元素 σ i \sigma_{i} σi称为奇异值, σ i = λ i \sigma_{i}=\sqrt{\lambda_{i}} σi=λi, λ i \lambda_{i} λi是 A T A A^{T}A ATA的特征值(或 A A T AA^{T} AAT,两者特征值相同)。
另外,U和V都是正交矩阵(因为它们是对称矩阵求出来的呀!), 即满足 U T U = E , V T V = E U^{T} U=E, V^{T} V=E UTU=E,VTV=E。
示意图如下:
奇异值在矩阵中是按照从大到小排列,而且奇异值的减少特别的快,在很多情况下,前10%甚至1%的奇异值的和就占了全部的奇异值之和的99%以上的比例。也就是说,我们可以用最大的k个的奇异值和对应的左右奇异向量来近似描述矩阵。也就是说:
A m × n = U m × m Σ m × n V n × n T ≈ U m × k Σ k × k V k × n T A_{m \times n}=U_{m \times m} \Sigma_{m \times n} V_{n \times n}^{T} \approx U_{m \times k} \Sigma_{k \times k} V_{k \times n}^{T} Am×n=Um×mΣm×nVn×nT≈Um×kΣk×kVk×nT
其中,k是一个远小于m、n的数。SVD具有的这种特性可以用于PCA降维、数据压缩和去噪等,关于PCA的内容会另写一篇博客。
reference
<<工程数学线性代数第六版>>
<<线性代数及其应用>>
https://www.zhihu.com/question/21874816/answer/181864044
https://blog.csdn.net/itnerd/article/details/83445155
https://www.cnblogs.com/pinard/p/6251584.html
如果对你有帮助,请点个赞让我知道:-D