利用MATLAB模糊控制器实现对水位高度调节SIMULINK仿真(隶属度7分级)
A.理论分析与设计
(1)确定模糊控制器的输入、输出变量
模糊控制器的两个输入变量,分别选为液位偏差E(设定液位高度r-实测液位高度y)和液位偏差变化率EC,输出模糊变量为控制阀门开度U;
(2)确定输入、输出语言变量的空间分割
液位偏差E对应语言变量为Level,其论域为X={-1,-0.6667,-0.3333,0,0.3333,0.6667,1},对应的语言值为 {PB,PM,PS,ZO,NS,NM,NB},分别表示当前水位高,较高,偏高,正好,偏低,较低,低;液位偏差变化率EC对应语言变量为EC,其论域为Y={-0.1,-0.03333,0,-0.03333, 0.1},对应的语言值为{NB, NS,ZO,PS,PB},分别表示当前水位快速下降、下降、不变、上升、快速上升。控制器输出为控制阀门开度U,对应语言变量为U,其论域为{-3,-2,-1,0,1,2,3},对应语言值为{NB,NM,NS,ZO,PS,PM,PB},分别表示“快关阀门”、 “中关阀门”、“慢关阀门”、“阀门开度不变”、“慢开阀门”、“中开阀门”、“快开阀门”。
(3)确定语言值的隶属度函数
Level和EC用高斯型隶属函数,U用三角形隶属度函数。
(4)确定液位模糊控制器的结构
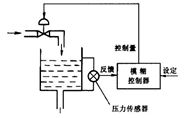
如图1所示为根据(1)-(3)分析设计的液位模糊控制器的结构,虚线框中的为模糊控制器,执行机构为阀门,被控对象为水箱的液位高度。r(t)为给定液位高度,e(k)为液位偏差的原始信号。
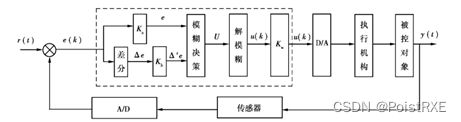
图1 液位模糊控制器的结构
B.FUZZY控制器设计
(1)FUZZY控制器结构
如图2所示,FUZZY控制器结构采用二维模糊控制器,输入变量为误差Level及误差变化率EC,输出变量为阀门开度U,FUZZY控制算法为Mamdani的关系矩阵法。Level和EC用高斯型隶属函数,U用三角形隶属度函数。解模糊化方法为中位数法。

图2 FUZZY控制器结构
(2)建立隶属度函数
参照“A.理论分析与设计”中的第(2)步设置相关参数的设置,如图3所示为level的隶属度函数设置。
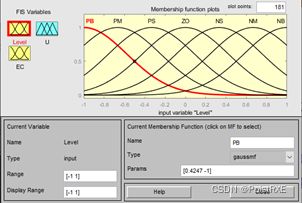
图3 level的隶属度函数设置
如图4所示为rate的隶属度函数设置。
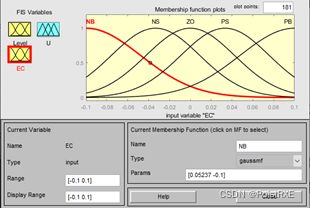
图4 rate的隶属度函数设置
如图5所示为valve的隶属度函数设置。

图5 valve的隶属度函数设置
(3)建立液位模糊控制规则表
表1 液位模糊控制规则表
| Level U EC |
NB |
NM |
NS |
ZO |
PS |
PM |
PB |
| NB |
PB |
PM |
PM |
PS |
PS |
ZO |
NS |
| NS |
PM |
PM |
PS |
PS |
ZO |
NS |
NS |
| ZO |
PM |
PS |
PS |
ZO |
NS |
NS |
NM |
| PS |
PM |
PS |
PS |
ZO |
NS |
NM |
NM |
| PB |
PS |
ZO |
NS |
NS |
NM |
NM |
NB |
在FUZZY控制器中填写该表格,如图6所示为部分rule设置。
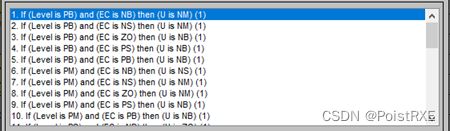
图6 部分rule设置
在view中查看Rules,如图7所示。
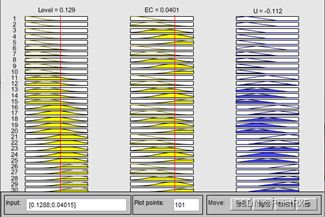
图7 RULES实例
在view中查看FIS输出量曲面观测窗,如图8所示为surface观测窗。

图8 surface观测窗
(4)输出FUZZY控制器
顺序单击File--Export --To Workspace和To File,将模糊控制器保存为E_EC_U, 模糊控制器设计完毕。
C. 建立基于模糊控制器的液位模糊控制的Simulink模型
(1)搭建Simulink模型
如图9所示为液位模糊控制的Simulink整体框图。
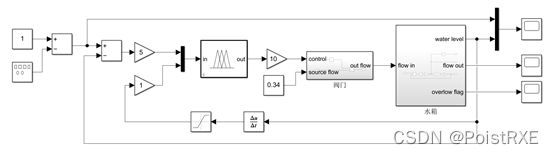
图9 Simulink整体框图
(2)阀门子系统框图、限幅积分器的参数设置、水箱子系统框图、限幅积分器的参数设置、Overflow sensor参数设置、Signal Generator、Saturation参数设置与利用MATLAB模糊控制器实现对水位高度调节SIMULINK仿真(隶属度3分级)_PoistRXE的博客-CSDN博客利用MATLAB模糊控制器实现对水位高度调节SIMULINK仿真(隶属度3分级)https://blog.csdn.net/qq_42816065/article/details/122397812相同,这里不做累述。如图10所示为Fuzzy Logic Controller参数设置界面。
图10 Fuzzy Logic Controller参数设置
D. Simulink仿真结果
如图11所示为Simulink仿真结果,蓝色的线给定输入,黄色的线实际液位的变化,橙色的为示例6.1的液位变化结果。可以从结果中看出该模糊控制器能够实现无静差控制,快速性较好,但是出现超调。与示例6.1中的模糊控制器相比,该模糊控制器快速性更好,但是出现了超调。这是因为控制规则中误差起的作用大,可以使系统尽快能够快速调节液位,同时增大了超调。所以该模糊控制器适用于液位偏差较大,系统远离稳态的情况。
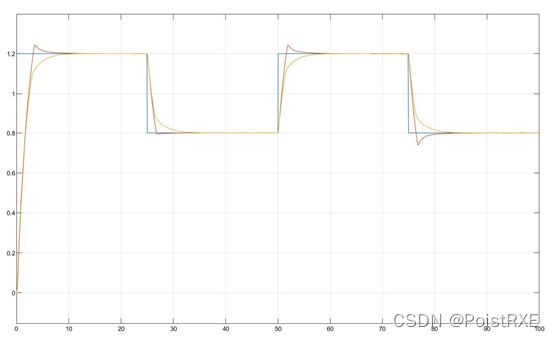
图14 Simulink仿真结果