附代码 SegNet
参考链接:https://blog.csdn.net/zhuzemin45/article/details/79709874
代码链接:https://github.com/delta-onera/segnet_pytorch/blob/master/segnet.py
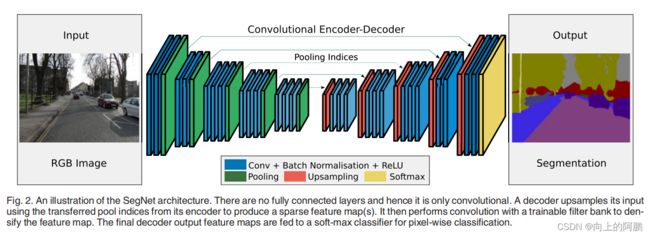
SegNet和FCN,DeConv思路十分相似,只是Encoder,Decoder(Upsampling)使用的技术不一致。此外SegNet的编码器部分使用的是VGG16的前13层卷积网络,每个编码器层都对应一个解码器层,最终解码器的输出被送入soft-max分类器以独立的为每个像素产生类概率。上采样处采用了Unpool进行上采样。
代码:
import torch
import torch.nn as nn
import torch.nn.functional as F
from collections import OrderedDict
class SegNet(nn.Module):
def __init__(self,input_nbr,label_nbr):
super(SegNet, self).__init__()
batchNorm_momentum = 0.1
self.conv11 = nn.Conv2d(input_nbr, 64, kernel_size=3, padding=1)
self.bn11 = nn.BatchNorm2d(64, momentum= batchNorm_momentum)
self.conv12 = nn.Conv2d(64, 64, kernel_size=3, padding=1)
self.bn12 = nn.BatchNorm2d(64, momentum= batchNorm_momentum)
self.conv21 = nn.Conv2d(64, 128, kernel_size=3, padding=1)
self.bn21 = nn.BatchNorm2d(128, momentum= batchNorm_momentum)
self.conv22 = nn.Conv2d(128, 128, kernel_size=3, padding=1)
self.bn22 = nn.BatchNorm2d(128, momentum= batchNorm_momentum)
self.conv31 = nn.Conv2d(128, 256, kernel_size=3, padding=1)
self.bn31 = nn.BatchNorm2d(256, momentum= batchNorm_momentum)
self.conv32 = nn.Conv2d(256, 256, kernel_size=3, padding=1)
self.bn32 = nn.BatchNorm2d(256, momentum= batchNorm_momentum)
self.conv33 = nn.Conv2d(256, 256, kernel_size=3, padding=1)
self.bn33 = nn.BatchNorm2d(256, momentum= batchNorm_momentum)
self.conv41 = nn.Conv2d(256, 512, kernel_size=3, padding=1)
self.bn41 = nn.BatchNorm2d(512, momentum= batchNorm_momentum)
self.conv42 = nn.Conv2d(512, 512, kernel_size=3, padding=1)
self.bn42 = nn.BatchNorm2d(512, momentum= batchNorm_momentum)
self.conv43 = nn.Conv2d(512, 512, kernel_size=3, padding=1)
self.bn43 = nn.BatchNorm2d(512, momentum= batchNorm_momentum)
self.conv51 = nn.Conv2d(512, 512, kernel_size=3, padding=1)
self.bn51 = nn.BatchNorm2d(512, momentum= batchNorm_momentum)
self.conv52 = nn.Conv2d(512, 512, kernel_size=3, padding=1)
self.bn52 = nn.BatchNorm2d(512, momentum= batchNorm_momentum)
self.conv53 = nn.Conv2d(512, 512, kernel_size=3, padding=1)
self.bn53 = nn.BatchNorm2d(512, momentum= batchNorm_momentum)
self.conv53d = nn.Conv2d(512, 512, kernel_size=3, padding=1)
self.bn53d = nn.BatchNorm2d(512, momentum= batchNorm_momentum)
self.conv52d = nn.Conv2d(512, 512, kernel_size=3, padding=1)
self.bn52d = nn.BatchNorm2d(512, momentum= batchNorm_momentum)
self.conv51d = nn.Conv2d(512, 512, kernel_size=3, padding=1)
self.bn51d = nn.BatchNorm2d(512, momentum= batchNorm_momentum)
self.conv43d = nn.Conv2d(512, 512, kernel_size=3, padding=1)
self.bn43d = nn.BatchNorm2d(512, momentum= batchNorm_momentum)
self.conv42d = nn.Conv2d(512, 512, kernel_size=3, padding=1)
self.bn42d = nn.BatchNorm2d(512, momentum= batchNorm_momentum)
self.conv41d = nn.Conv2d(512, 256, kernel_size=3, padding=1)
self.bn41d = nn.BatchNorm2d(256, momentum= batchNorm_momentum)
self.conv33d = nn.Conv2d(256, 256, kernel_size=3, padding=1)
self.bn33d = nn.BatchNorm2d(256, momentum= batchNorm_momentum)
self.conv32d = nn.Conv2d(256, 256, kernel_size=3, padding=1)
self.bn32d = nn.BatchNorm2d(256, momentum= batchNorm_momentum)
self.conv31d = nn.Conv2d(256, 128, kernel_size=3, padding=1)
self.bn31d = nn.BatchNorm2d(128, momentum= batchNorm_momentum)
self.conv22d = nn.Conv2d(128, 128, kernel_size=3, padding=1)
self.bn22d = nn.BatchNorm2d(128, momentum= batchNorm_momentum)
self.conv21d = nn.Conv2d(128, 64, kernel_size=3, padding=1)
self.bn21d = nn.BatchNorm2d(64, momentum= batchNorm_momentum)
self.conv12d = nn.Conv2d(64, 64, kernel_size=3, padding=1)
self.bn12d = nn.BatchNorm2d(64, momentum= batchNorm_momentum)
self.conv11d = nn.Conv2d(64, label_nbr, kernel_size=3, padding=1)
def forward(self, x):
# Stage 1
x11 = F.relu(self.bn11(self.conv11(x)))
x12 = F.relu(self.bn12(self.conv12(x11)))
x1p, id1 = F.max_pool2d(x12,kernel_size=2, stride=2,return_indices=True)
# Stage 2
x21 = F.relu(self.bn21(self.conv21(x1p)))
x22 = F.relu(self.bn22(self.conv22(x21)))
x2p, id2 = F.max_pool2d(x22,kernel_size=2, stride=2,return_indices=True)
# Stage 3
x31 = F.relu(self.bn31(self.conv31(x2p)))
x32 = F.relu(self.bn32(self.conv32(x31)))
x33 = F.relu(self.bn33(self.conv33(x32)))
x3p, id3 = F.max_pool2d(x33,kernel_size=2, stride=2,return_indices=True)
# Stage 4
x41 = F.relu(self.bn41(self.conv41(x3p)))
x42 = F.relu(self.bn42(self.conv42(x41)))
x43 = F.relu(self.bn43(self.conv43(x42)))
x4p, id4 = F.max_pool2d(x43,kernel_size=2, stride=2,return_indices=True)
# Stage 5
x51 = F.relu(self.bn51(self.conv51(x4p)))
x52 = F.relu(self.bn52(self.conv52(x51)))
x53 = F.relu(self.bn53(self.conv53(x52)))
x5p, id5 = F.max_pool2d(x53,kernel_size=2, stride=2,return_indices=True)
# Stage 5d
x5d = F.max_unpool2d(x5p, id5, kernel_size=2, stride=2)
x53d = F.relu(self.bn53d(self.conv53d(x5d)))
x52d = F.relu(self.bn52d(self.conv52d(x53d)))
x51d = F.relu(self.bn51d(self.conv51d(x52d)))
# Stage 4d
x4d = F.max_unpool2d(x51d, id4, kernel_size=2, stride=2)
x43d = F.relu(self.bn43d(self.conv43d(x4d)))
x42d = F.relu(self.bn42d(self.conv42d(x43d)))
x41d = F.relu(self.bn41d(self.conv41d(x42d)))
# Stage 3d
x3d = F.max_unpool2d(x41d, id3, kernel_size=2, stride=2)
x33d = F.relu(self.bn33d(self.conv33d(x3d)))
x32d = F.relu(self.bn32d(self.conv32d(x33d)))
x31d = F.relu(self.bn31d(self.conv31d(x32d)))
# Stage 2d
x2d = F.max_unpool2d(x31d, id2, kernel_size=2, stride=2)
x22d = F.relu(self.bn22d(self.conv22d(x2d)))
x21d = F.relu(self.bn21d(self.conv21d(x22d)))
# Stage 1d
x1d = F.max_unpool2d(x21d, id1, kernel_size=2, stride=2)
x12d = F.relu(self.bn12d(self.conv12d(x1d)))
x11d = self.conv11d(x12d)
return x11d
def load_from_segnet(self, model_path):
s_dict = self.state_dict()# create a copy of the state dict
th = torch.load(model_path).state_dict() # load the weigths
# for name in th:
# s_dict[corresp_name[name]] = th[name]
self.load_state_dict(th)