clion ros debug clion配置ros环境及调试
最新2021.3.4版本的clion配置
https://www.jetbrains.com/help/clion/ros-setup-tutorial.html
注意:打开工程需要找到工程下的cmakeLists.txt文件。
下面这个是2020.3版本的clion, 可以作为参考
本文主要记录在clion配置ros的开发环境,以及调试ros程序
1. 下载并安装clion
到clion官网下载clion软件并自己注册账号登陆。
2. 创建ubuntu左侧快速启动图标 (add to favorites)
在clion的菜单栏中点击 Tools -> Create Desktop Entry , 然后再重新启动clion在左侧clion的图标点击右键选择 add to favorites 就可以创建左侧图标快速启动。

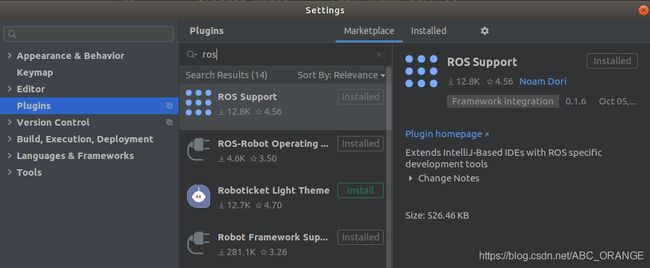
3. 安装ros插件
在clion软件的 File -> settings -> Plugins 搜索ros,安装与ros相关的前三个。然后关闭clion。
4. 编辑clion启动项
配置clion的启动项,让其点击clion图标启动的时候就source系统环境。
gedit ~/.local/share/applications/jetbrains-clion.desktop
更改 Exec=bash "/home/jack/Downloads/clion-2020.3/bin/clion.sh" %f 为
Exec=bash -i -c "/home/jack/Downloads/clion-2020.3/bin/clion.sh" %f
上述主要的修改是添加了bash -i -c , 更改后文件效果是这个样子的:
[Desktop Entry]
Version=1.0
Type=Application
Name=CLion
Icon=/home/jack/Music/clion-2020.3/bin/clion.svg
Exec=bash -i -c "/home/jack/Music/clion-2020.3/bin/clion.sh" %f
Comment=A cross-platform IDE for C and C++
Categories=Development;IDE;
Terminal=false
StartupWMClass=jetbrains-clion
StartupNotify=true
注意: 如果上面这个更改后无法通过图标启动clion,那就按照下面这种方式更改 ,如果好用那就直接略过下面直接看步骤 5
执行下面命令
cd /home/jack/Music/clion-2020.3/bin/
touch start_clion.sh
chmod 777 start_clion.sh
在start_clion.sh中填入如下内容
#!/bin/bash
source /opt/ros/melodic/setup.bash
/home/jack/Music/clion-2020.3/bin/clion.sh
然后执行命令
gedit ~/.local/share/applications/jetbrains-clion.desktop
更改 Exec=“/home/jack/Downloads/clion-2020.3/bin/clion.sh” %f为
Exec=/home/jack/Downloads/clion-2020.3/bin/start_clion.sh
更改后样子如下:
[Desktop Entry]
Version=1.0
Type=Application
Name=CLion
Icon=/home/jack/Music/clion-2020.3/bin/clion.svg
Exec=/home/jack/Music/clion-2020.3/bin/start_clion.sh
Comment=A cross-platform IDE for C and C++
Categories=Development;IDE;
Terminal=false
StartupWMClass=jetbrains-clion
StartupNotify=true
这样直接点开CLion的图标就能加载clion的脚本,而不用运行命令行启动clion的脚本。运行命令行启动clion的脚本是为了启动ros的相关环境变量。
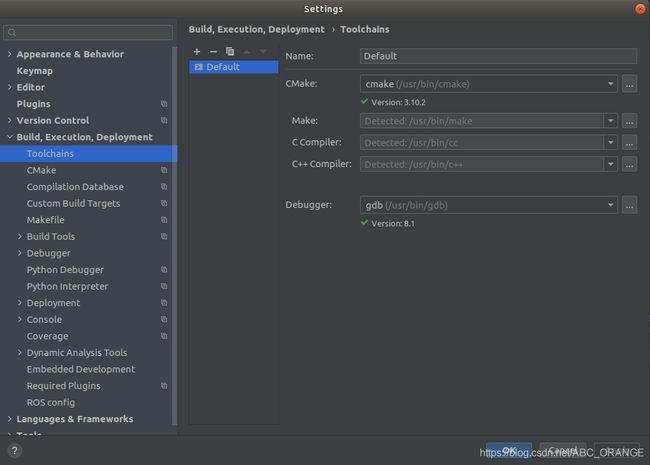
5. 更改 clion的cmake为系统的安装版本
启动clion, 在 File -> settings -> Build, Execution, Deployment -> Toolchains 更改Cmake版本,更改后的配置如下图:
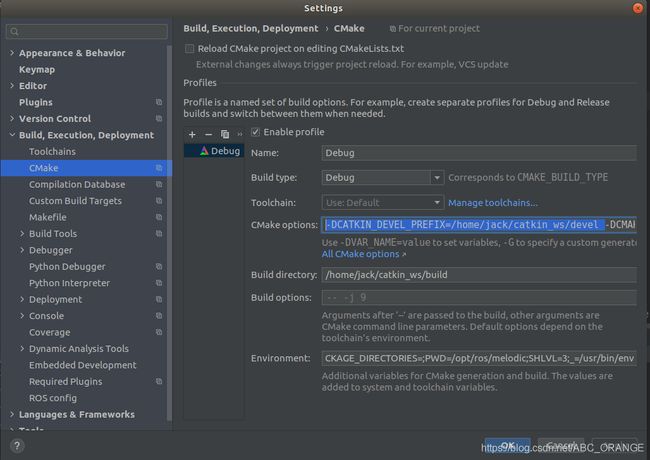
6. 查看clion的cmake相关配置
关闭clion并重新打开,在File -> Import Ros Workspace 打开ros的工作空间 例如: catkin_ws.
在File ->settings ->Build, Execution, Deployment -> CMake 中配置应该如下图所示
:主要看 CMake options 和 Build directory 这两项:
 若配置不同则修改如下(若与上图一样可以不看下面这设置):
若配置不同则修改如下(若与上图一样可以不看下面这设置):
原始默认的工作路径会在当前package下生成cmake-build-debug,要修改到catkin_ws/build下,
Cmake options中可自行添加如下一行:
-DCATKIN_DEVEL_PREFIX=/home/jack/catkin_ws/devel
注意: 2021.3.4版本的这个路径配置需要更改:具体看https://www.jetbrains.com/help/clion/ros-setup-tutorial.html
7.调试Ros程序
在clion的左上角 选择需要调试的程序节点名
 官网调试教程:
官网调试教程:
https://www.jetbrains.com/help/clion/ros-setup-tutorial.html
https://www.jetbrains.com/help/clion/2020.2/clion-quick-start-guide.html#debugging
其他人整理调试教程:
https://blog.csdn.net/qq_37611824/article/details/108335251
本文参考链接:
https://blog.csdn.net/zz123456zzss/article/details/85392686
https://blog.csdn.net/TengYun_zhang/article/details/96123339
https://blog.csdn.net/weixin_37954144/article/details/100119420