Paper reading:Fine-Grained Head Pose Estimation Without Keypoints (CVPR2018)
Paper reading:Fine-Grained Head Pose Estimation Without Keypoints (CVPR2018)
一、 背景
为什么要读这篇论文,因为LZ之前要做头部姿态估计,看到一些传统的方法,都是先进行人脸检测,然后再进行关键点定位,当然现在可以一起做,anyway,得到最后的关键点位置,再使用一个通用的3D人脸模型,通过solvePnP来得到最终的头部姿态,但是不管是脑子中考虑还是最后的动手实践,得到的结论就是这种方式的头部姿态方法不robust。可以想一下:每个人的脸型不一样吧,物管肯定也有差异,3D通用模型也有很多方式,关键点定位也有偏差,这些都是不确定的,只能说当精度要求不高,并且关键点定位足够准确,且头部姿态估计的对象和3D的通用人脸模型相对匹配的情况下,这种方式才比较好,那么问题来了,算法的泛化能力呢。。。
于是乎,还是往深度学习的方法上瞅瞅,就看到了题目中的文章,简单测试了下,觉得效果可行,那么就开始阅读论文和代码吧。
二、 数据集准备
主要使用的数据是300W-LP,下载的地址为: http://www.cbsr.ia.ac.cn/users/xiangyuzhu/projects/3ddfa/main.htm
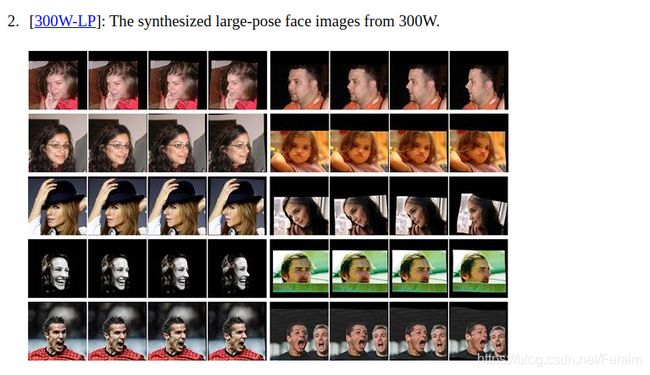
大概有2.6个G,下载可能需要一段时间,所以有的时候LZ如果确定要尝试一种方法,首先就要开始准备下载数据集,在下载数据集的时候可以在慢慢阅读下论文。
当然这些数据都是合成的,所以有些图片看起来会有点奇怪
三、 训练代码运行的一些问题
1. python2和python3的兼容性问题
LZ用的是python3,原始论文使用的是python2,所以会存在一些兼容性的问题,这些都比较好修改,例如把xrange替换成range这种。
2. pytorch的版本问题
因为是两三年前的代码了,pytorch可能版本比较旧,也会存在一些代码的修改
- utils.py中
# 直接注释掉这一行
# from torch.utils.serialization import load_lua
- 训练代码以train_hopenet.py为例吧
error:
RuntimeError: Mismatch in shape: grad_output[0] has a shape of torch.Size([1]) and output[0] has a shape of torch.Size([]).
solution:
# grad_seq = [torch.ones(1).cuda(gpu) for _ in range(len(loss_seq))]
grad_seq = [torch.tensor(1.0).cuda(gpu) for _ in range(len(loss_seq))]
error:
IndexError: invalid index of a 0-dim tensor. Use tensor.item() to convert a 0-dim tensor to a Python number
solution:
# print('Epoch [%d/%d], Iter [%d/%d] Losses: Yaw %.4f, Pitch %.4f, Roll %.4f'
# % (epoch + 1, num_epochs, i + 1, len(pose_dataset) // batch_size, loss_yaw.data[0],
# loss_pitch.data[0], loss_roll.data[0]))
print('Epoch [%d/%d], Iter [%d/%d] Losses: Yaw %.4f, Pitch %.4f, Roll %.4f'
% (epoch + 1, num_epochs, i + 1, len(pose_dataset) // batch_size, loss_yaw.item(),
loss_pitch.item(), loss_roll.item()))
运行就没啥问题了
 但是這個後面得看一下,爲什麼loss會突然增到這麼大。。。
但是這個後面得看一下,爲什麼loss會突然增到這麼大。。。
四、测试结果
因为这个算法的流程是要先进行人脸检测,然后在人脸检测框四周扩充一定的范围后进行头部姿态估计的,按照上述的方法,经过测试,确实效果还可以,但是如果是一整张大图,直接回归出头部姿态,这个结果就是非常不准确的了,下面我们来看下代码,看看是否有值得借鉴的信息。
五、代码部分
5.1 训练代码
我们就以train_hopenet.py为例,其他只是换了backbone,原理都是一样的,当然LZ还是小小改动了一下源码
- 一些常规设置
def parse_args():
"""Parse input arguments."""
parser = argparse.ArgumentParser(description='Head pose estimation using the Hopenet network.')
parser.add_argument('--gpu', dest='gpu_id', help='GPU device id to use [0]',
default=0, type=int)
parser.add_argument('--num_epochs', dest='num_epochs', help='Maximum number of training epochs.',
default=5, type=int)
parser.add_argument('--batch_size', dest='batch_size', help='Batch size.',
default=16, type=int)
parser.add_argument('--lr', dest='lr', help='Base learning rate.',
default=0.001, type=float)
parser.add_argument('--dataset', dest='dataset', help='Dataset type.', default='Pose_300W_LP', type=str)
parser.add_argument('--data_dir', dest='data_dir', help='Directory path for data.',
default='', type=str)
parser.add_argument('--filename_list', dest='filename_list',
help='Path to text file containing relative paths for every example.',
default='', type=str)
parser.add_argument('--output_string', dest='output_string', help='String appended to output snapshots.',
default='', type=str)
parser.add_argument('--alpha', dest='alpha', help='Regression loss coefficient.',
default=0.001, type=float)
parser.add_argument('--snapshot', dest='snapshot', help='Path of model snapshot.',
default='', type=str)
args = parser.parse_args()
return args
- 主函数
5.2 Hopenet部分
class Hopenet(nn.Module):
# Hopenet with 3 output layers for yaw, pitch and roll
# Predicts Euler angles by binning and regression with the expected value
def __init__(self, block, layers, num_bins):
self.inplanes = 64
super(Hopenet, self).__init__()
self.conv1 = nn.Conv2d(3, 64, kernel_size=7, stride=2, padding=3,
bias=False)
self.bn1 = nn.BatchNorm2d(64)
self.relu = nn.ReLU(inplace=True)
self.maxpool = nn.MaxPool2d(kernel_size=3, stride=2, padding=1)
self.layer1 = self._make_layer(block, 64, layers[0])
self.layer2 = self._make_layer(block, 128, layers[1], stride=2)
self.layer3 = self._make_layer(block, 256, layers[2], stride=2)
self.layer4 = self._make_layer(block, 512, layers[3], stride=2)
self.avgpool = nn.AvgPool2d(7)
self.fc_yaw = nn.Linear(512 * block.expansion, num_bins)
self.fc_pitch = nn.Linear(512 * block.expansion, num_bins)
self.fc_roll = nn.Linear(512 * block.expansion, num_bins)
# Vestigial layer from previous experiments
self.fc_finetune = nn.Linear(512 * block.expansion + 3, 3)
for m in self.modules():
if isinstance(m, nn.Conv2d):
n = m.kernel_size[0] * m.kernel_size[1] * m.out_channels
m.weight.data.normal_(0, math.sqrt(2. / n))
elif isinstance(m, nn.BatchNorm2d):
m.weight.data.fill_(1)
m.bias.data.zero_()
def _make_layer(self, block, planes, blocks, stride=1):
downsample = None
if stride != 1 or self.inplanes != planes * block.expansion:
downsample = nn.Sequential(
nn.Conv2d(self.inplanes, planes * block.expansion,
kernel_size=1, stride=stride, bias=False),
nn.BatchNorm2d(planes * block.expansion),
)
layers = []
layers.append(block(self.inplanes, planes, stride, downsample))
self.inplanes = planes * block.expansion
for i in range(1, blocks):
layers.append(block(self.inplanes, planes))
return nn.Sequential(*layers)
def forward(self, x):
x = self.conv1(x)
x = self.bn1(x)
x = self.relu(x)
x = self.maxpool(x)
x = self.layer1(x)
x = self.layer2(x)
x = self.layer3(x)
x = self.layer4(x)
x = self.avgpool(x)
x = x.view(x.size(0), -1)
pre_yaw = self.fc_yaw(x)
pre_pitch = self.fc_pitch(x)
pre_roll = self.fc_roll(x)
return pre_yaw, pre_pitch, pre_roll
5.3 datasets部分
这里LZ就选择其中的一个数据集Pose_300W_LP来进行解释
class Pose_300W_LP(Dataset):
# Head pose from 300W-LP dataset
def __init__(self, data_dir, filename_path, transform, img_ext='.jpg', annot_ext='.mat', image_mode='RGB'):
self.data_dir = data_dir
self.transform = transform
self.img_ext = img_ext
self.annot_ext = annot_ext
filename_list = get_list_from_filenames(filename_path)
self.X_train = filename_list
self.y_train = filename_list
self.image_mode = image_mode
self.length = len(filename_list)
def __getitem__(self, index):
#这个比较重要的是数据处理部分
img = Image.open(os.path.join(self.data_dir, self.X_train[index] + self.img_ext))
img = img.convert(self.image_mode)
mat_path = os.path.join(self.data_dir, self.y_train[index] + self.annot_ext)
# Crop the face loosely
pt2d = utils.get_pt2d_from_mat(mat_path) #这个是从mat中得到对应的68个关键点的坐标
x_min = min(pt2d[0, :])
y_min = min(pt2d[1, :])
x_max = max(pt2d[0, :])
y_max = max(pt2d[1, :])
# k = 0.2 to 0.40
k = np.random.random_sample() * 0.2 + 0.2
x_min -= 0.6 * k * abs(x_max - x_min)
y_min -= 2 * k * abs(y_max - y_min)
x_max += 0.6 * k * abs(x_max - x_min)
y_max += 0.6 * k * abs(y_max - y_min)
img = img.crop((int(x_min), int(y_min), int(x_max), int(y_max)))
# We get the pose in radians
pose = utils.get_ypr_from_mat(mat_path)
# And convert to degrees.
pitch = pose[0] * 180 / np.pi
yaw = pose[1] * 180 / np.pi
roll = pose[2] * 180 / np.pi
# Flip?
rnd = np.random.random_sample()
if rnd < 0.5:
yaw = -yaw
roll = -roll
img = img.transpose(Image.FLIP_LEFT_RIGHT)
# Blur?
rnd = np.random.random_sample()
if rnd < 0.05:
img = img.filter(ImageFilter.BLUR)
# Bin values
bins = np.array(range(-99, 102, 3))
binned_pose = np.digitize([yaw, pitch, roll], bins) - 1
# Get target tensors
labels = binned_pose
cont_labels = torch.FloatTensor([yaw, pitch, roll])
if self.transform is not None:
img = self.transform(img)
return img, labels, cont_labels, self.X_train[index]
def __len__(self):
# 122,450
return self.length
数据集中的mat主要包含这几个部分:
