融合感知中的激光雷达
毫米波雷达在汽车上应用已久,ACC自适应巡航就是靠毫米波雷达实现的。目前毫米波雷达成本可控,同时毫米波雷达在恶劣天气下也可以正常工作,并且可以更直接的判断其他车辆的速度,因此在自动(辅助)驾驶中应用广泛。但毫米波雷达识别精度有限,难以判断障碍物的具体轮廓,目前主流的毫米波雷达甚至无法判断垂直高度信息,对小尺寸障碍物的判断更加模糊。毫米波雷达发射的电磁波波长在1-10mm之间。
2021上海车展期间,华为发布了可装车的4D成像雷达,其实也是一种毫米波雷达,不过在精度上进行了大幅优化。在成像精度上有了大幅提升,不仅可以勾勒出车、人等障碍物的大致轮廓,甚至可以越过前车探测前方两台车的速度与距离。相应的,成本也有较大升高。毫米波雷达对金属敏感,对非金属探测能力则较弱。
激光雷达可以准确的感知周边环境的三维信息,探测精度在厘米级以内。这就使得激光雷达能够准确的识别出障碍物具体轮廓、距离,且不会漏判、误判前方出现的障碍物。激光雷达普遍的有效探测距离也更远。
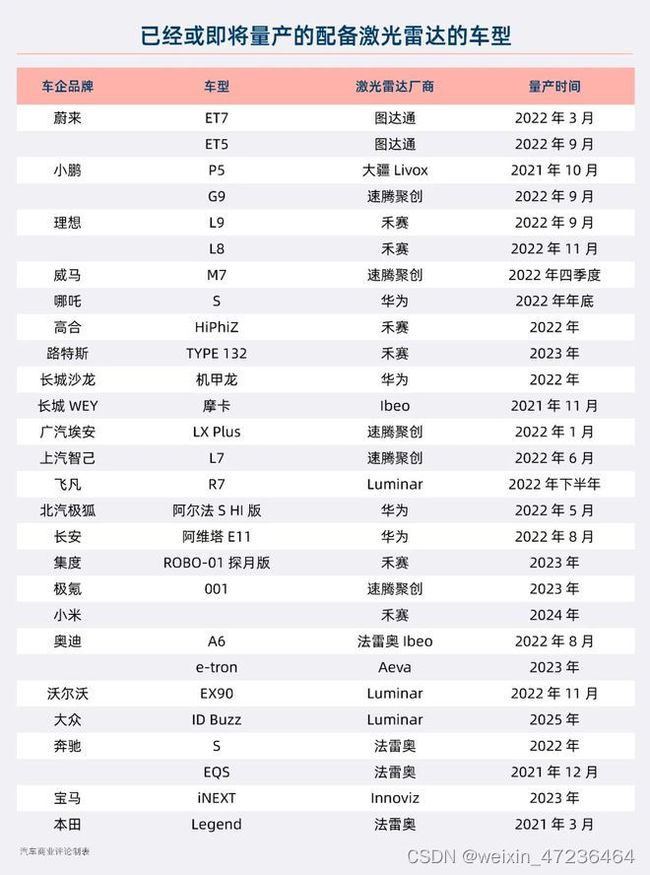
随着激光雷达上车加速,有机构预测2023年国内乘用车前装标配激光雷达交付将冲刺40-50万颗规模,同时,L3/L4的B端运营市场也将受益新政策(智能网联汽车准入和上路通行试点),共同带动激光雷达前装市场呈现双线并行落地格局。
预计2025年前装标配激光雷达交付将有望达到200万颗/年的规模。其中,面向私人消费市场的车型,将主要以1颗前向、2颗补盲配置为主,L3/L4的B端前装则主要以1颗前向、4颗补盲配置为主。
(转自汽车商业评论)
波长
由于要避免可见光对人眼的伤害,激光雷达选用的激光波长一般不低于850nm。目前主流的激光雷达主要有905nm和1550nm两种波长。
由于905nm激光雷达接收器可以直接选用价格较低的硅材质,因此成本也更加可控,905nm激光雷达成为了当下最主流的激光雷达所选用的波长。不过为了避免对人眼造成伤害,发射功率需控制在对人无害的范围内,正因如此,905nm激光的探测距离也会受到限制。
相比905nm激光,1550nm激光会被人眼晶状体和角膜吸收,不会对视网膜产生伤害,因此1550nm激光雷达可以发射更大功率,探测距离也可以做到更远。但是1550nm激光雷达无法采用常规的硅吸收,而需要用到更加昂贵的铟镓砷(InGaAs)材质,因此在价格上较905nm激光雷达会贵出很多。
驱动方式
激光雷达按驱动方式可分为机械式、混合固态式(MEMS)、光学相控阵(OPA)、泛光面阵式(FLASH)。

(转自太平洋汽车)
机械式结构需要复杂的机械结构,同时点云的测量又需要对安装进行精确定位。考虑环境和老化的影响,平均的失效时间仅1000-3000小时,难以达到车厂最低13000小时的要求。且需考虑外界养护的问题。因此机械式结构极大的限制了成本和应用推广。
MEMS激光雷达利用微电子机械系统的技术驱动旋镜,反射激光束指向不同方向。固态激光雷达的优点包括了:数据采集速度快,分辨率高,对于温度和振动的适应性强;通过波束控制,探测点(点云)可以任意分布,例如在高速公路主要扫描前方远处,对于侧面稀疏扫描但并不完全忽略,在十字路口加强侧面扫描。而只能匀速旋转的机械式激光雷达是无法执行这种精细操作的。典型应用有法雷奥SCALA激光雷达。目前应用在奥迪A8(第一款L3级的自动驾驶车辆)。安装在前保险杠位置,使用MEMS技术得到145°的扫描角度,80m的探测距离。
光学相控阵与电子相控阵类似,利用光的干涉原理,通过改变不同缝中入射光线的相位差改变光栅衍射后中央明纹(主瓣)的位置,从而改变主瓣的照射方向,起到调整探测方向的目的。光学相控阵的加工难度较高:光学相控阵要求阵列单元尺寸必须不大于半个波长,一般目前激光雷达的工作波长均在1微米左右,故阵列单元的尺寸必须不大于500nm。而且阵列密度越高,能量也越集中,这都提高了对加工精度的要求,需要一定的技术突破。
泛光面阵式的原理类似TOF相机,也就是快闪。在短时间直接发射出一大片覆盖探测区域的激光,再以高度灵敏的接收器,来完成对环境周围图像的绘制。它运行起来更像摄像头。激光束会直接向各个方向漫射,因此只要一次快闪就能照亮整个场景。随后,系统会利用微型传感器阵列采集不同方向反射回来的激光束。
当前主流方案为以MEMS为代表的半固态方案,长远来看,以OPA和FLASH为代表的全固态方案具有结构简单,扫描灵活的特点,具有更好的应用优势。
线数
单线雷达就是只有一个激光发射器和接收器,经过电机的旋转,投射到前面障碍物是一条线,这样的好处是数据量处理起来比较少,效率高,稳定性好,技术成熟,但是只能检测同一个高度的障碍物,不能测量整体轮廓,多应用于扫地机器人、酒店服务机器人
多线雷达目前市场有4线、8线、16线、32线、64线、128线,就是在垂直方向上具有多个发射器和接收器,通过电机的旋转,获得多条线束,线数越多,物体表面轮廓越完善,当然处理的数据量越大,对硬件要求越高;多线雷达主要应用在无人驾驶上,可以计算物体的高度信息,并对周围坏境进行3D建模。
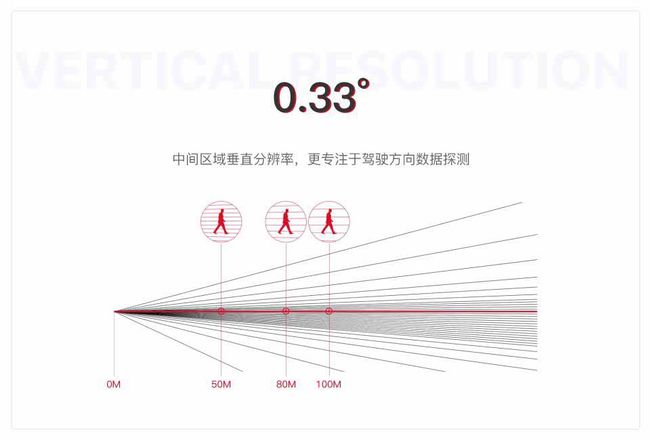
需要注意的是,垂直视场角为在垂直方向上可以观测的角度,一般为 40°。而它并不是对称均匀分布的,为了更好的扫描路面,激光光束会尽量向下偏置一定的角度。并且为了达到既检测到障碍物,同时把激光束集中到中间感兴趣的部分,来更好的检测车辆,激光雷达的光束不是垂直均匀分布的,而是中间密,两边疏。
(转自速腾聚创科技有限公司官网)
其它
激光雷达发出的激光点是有一定面积的,有时可能会出现1个激光点发出后,打在2个物体上(如同一束激光打在两片树叶上)
相同参数的激光雷达,有可能会存在相互间的干扰,[好比大家都拿手电筒乱射]
(转自速腾聚创科技有限公司官网)
激光雷达对于不同反射率的物体有不同的感知,而道路车道线、交通标识等多采用高反光率的涂层。视觉目前探测距离,识别能力等有诸多限制因素,因此通过激光雷达识别车道线等也是一种极佳的技术路线。

(转自太平洋汽车)
凭借高精度的感知能力,固定在路侧的激光雷达可以更准确的捕捉到车辆视觉盲区的行人等潜在障碍,通过V2X技术将视野盲区的潜在风险“告知”车辆,可以有效的避免“鬼探头”,有遮挡交叉路口侧翻车辆等难以主动避免的安全隐患。此外,路侧的激光雷达等V2X硬件并非单纯的为路上的汽车服务,还可以在安防、智慧城市等更多领域发挥作用。
参考链接
关于激光雷达,看这一篇就够了 - 知乎 (zhihu.com)
一文详解激光雷达 - 知乎 (zhihu.com)
激光雷达上车元年,失望与希望_网易订阅 (163.com)
2022年中国激光雷达行业研究报告 - 知乎 (zhihu.com)
RS-LiDAR-32 - 深圳市速腾聚创科技有限公司 (robosense.ai)
走进自动驾驶传感器(一)——激光雷达 - 知乎 (zhihu.com)