树莓派使用TOF050F传感器(i2c通信)
系统:64位Ubuntu22.04
python版本:miniconda下的3.8
使用iic库:smbus2
使用现成代码:tholecek的VL6180-Python-3.X
其他材料准备:
TOF050F上位机
ttl转串口模块
一台装windows系统的电脑
目录
一、安装环境
二、准备代码
三、 打开终端更改权限
四、 使用上位机配置TOF模块
五、 连线,并运行test.py
一、安装环境
1. 22.04系统烧录
2. 安装miniconda
3. 在虚拟环境中安装smbus2:
pip install smbus24. 创建一个test.py文件
二、准备代码
1. 将以下代码复制到 test.py中:
import time
import smbus2
from ST_VL6180X import VL6180X
i2c = smbus2.SMBus(1)
i2c.open(1)
class TOF050F: # 创建一个类
def __init__(self):
self.Lidar = VL6180X(i2cBus=i2c) # 调用VL6180X传感器的处理函数
# 初始化
self.Lidar.get_identification()
if self.Lidar.idModel != 0xB4:
print("Not Valid Sensor, Id reported as ", hex(self.Lidar.idModel))
else:
print("Valid Sensor, ID reported as ", hex(self.Lidar.idModel))
self.Lidar.default_settings()
def distance_mm(self): # 获取传感器距离信息
return self.Lidar.get_distance()
My_TOF050F = TOF050F() # 创建一个对象
while True: # 循环
print(My_TOF050F.distance_mm()) # 打印距离
time.sleep(0.01)
2. 将 ST_VL6180X.py 放于与 test.py 同级目录下
3. 修改 ST_VL6180X.py 后内容:
#!/usr/bin/python
# Supports Python 3.X and Above
import time
import smbus2
# ===========================================================================
# ST_VL6180x ToF ranger Class
#
# Code updated to Python 3.X by T. Holecek
# References ST_VL6180x Repository of A, Weber
# https://bitbucket.org/310weber/st_vl6180x
#
# Originally written by A. Weber
# References Arduino library by Casey Kuhns of SparkFun:
# https://github.com/sparkfun/ToF_Range_Finder-VL6180_Library\
# ===========================================================================
class VL6180X:
#i2c = None
__VL6180X_IDENTIFICATION_MODEL_ID = 0x0000
__VL6180X_IDENTIFICATION_MODEL_REV_MAJOR = 0x0001
__VL6180X_IDENTIFICATION_MODEL_REV_MINOR = 0x0002
__VL6180X_IDENTIFICATION_MODULE_REV_MAJOR = 0x0003
__VL6180X_IDENTIFICATION_MODULE_REV_MINOR = 0x0004
__VL6180X_IDENTIFICATION_DATE = 0x0006 # 16bit value
__VL6180X_IDENTIFICATION_TIME = 0x0008 # 16bit value
__VL6180X_SYSTEM_MODE_GPIO0 = 0x0010
__VL6180X_SYSTEM_MODE_GPIO1 = 0x0011
__VL6180X_SYSTEM_HISTORY_CTRL = 0x0012
__VL6180X_SYSTEM_INTERRUPT_CONFIG_GPIO = 0x0014
__VL6180X_SYSTEM_INTERRUPT_CLEAR = 0x0015
__VL6180X_SYSTEM_FRESH_OUT_OF_RESET = 0x0016
__VL6180X_SYSTEM_GROUPED_PARAMETER_HOLD = 0x0017
__VL6180X_SYSRANGE_START = 0x0018
__VL6180X_SYSRANGE_THRESH_HIGH = 0x0019
__VL6180X_SYSRANGE_THRESH_LOW = 0x001A
__VL6180X_SYSRANGE_INTERMEASUREMENT_PERIOD = 0x001B
__VL6180X_SYSRANGE_MAX_CONVERGENCE_TIME = 0x001C
__VL6180X_SYSRANGE_CROSSTALK_COMPENSATION_RATE = 0x001E
__VL6180X_SYSRANGE_CROSSTALK_VALID_HEIGHT = 0x0021
__VL6180X_SYSRANGE_EARLY_CONVERGENCE_ESTIMATE = 0x0022
__VL6180X_SYSRANGE_PART_TO_PART_RANGE_OFFSET = 0x0024
__VL6180X_SYSRANGE_RANGE_IGNORE_VALID_HEIGHT = 0x0025
__VL6180X_SYSRANGE_RANGE_IGNORE_THRESHOLD = 0x0026
__VL6180X_SYSRANGE_MAX_AMBIENT_LEVEL_MULT = 0x002C
__VL6180X_SYSRANGE_RANGE_CHECK_ENABLES = 0x002D
__VL6180X_SYSRANGE_VHV_RECALIBRATE = 0x002E
__VL6180X_SYSRANGE_VHV_REPEAT_RATE = 0x0031
__VL6180X_SYSALS_START = 0x0038
__VL6180X_SYSALS_THRESH_HIGH = 0x003A
__VL6180X_SYSALS_THRESH_LOW = 0x003C
__VL6180X_SYSALS_INTERMEASUREMENT_PERIOD = 0x003E
__VL6180X_SYSALS_ANALOGUE_GAIN = 0x003F
__VL6180X_SYSALS_INTEGRATION_PERIOD = 0x0040
__VL6180X_RESULT_RANGE_STATUS = 0x004D
__VL6180X_RESULT_ALS_STATUS = 0x004E
__VL6180X_RESULT_INTERRUPT_STATUS_GPIO = 0x004F
__VL6180X_RESULT_ALS_VAL = 0x0050
__VL6180X_RESULT_HISTORY_BUFFER = 0x0052
__VL6180X_RESULT_RANGE_VAL = 0x0062
__VL6180X_RESULT_RANGE_RAW = 0x0064
__VL6180X_RESULT_RANGE_RETURN_RATE = 0x0066
__VL6180X_RESULT_RANGE_REFERENCE_RATE = 0x0068
__VL6180X_RESULT_RANGE_RETURN_SIGNAL_COUNT = 0x006C
__VL6180X_RESULT_RANGE_REFERENCE_SIGNAL_COUNT = 0x0070
__VL6180X_RESULT_RANGE_RETURN_AMB_COUNT = 0x0074
__VL6180X_RESULT_RANGE_REFERENCE_AMB_COUNT = 0x0078
__VL6180X_RESULT_RANGE_RETURN_CONV_TIME = 0x007C
__VL6180X_RESULT_RANGE_REFERENCE_CONV_TIME = 0x0080
__VL6180X_READOUT_AVERAGING_SAMPLE_PERIOD = 0x010A
__VL6180X_FIRMWARE_BOOTUP = 0x0119
__VL6180X_FIRMWARE_RESULT_SCALER = 0x0120
__VL6180X_I2C_SLAVE_DEVICE_ADDRESS = 0x0212
__VL6180X_INTERLEAVED_MODE_ENABLE = 0x02A3
__ALS_GAIN_1 = 0x06
__ALS_GAIN_1_25 = 0x05
__ALS_GAIN_1_67 = 0x04
__ALS_GAIN_2_5 = 0x03
__ALS_GAIN_5 = 0x02
__ALS_GAIN_10 = 0x01
__ALS_GAIN_20 = 0x00
__ALS_GAIN_40 = 0x07
# Dictionaries with the valid ALS gain values
# These simplify and clean the code (avoid abuse of if/elif/else clauses)
ALS_GAIN_REG = {
1: __ALS_GAIN_1,
1.25: __ALS_GAIN_1_25,
1.67: __ALS_GAIN_1_67,
2.5: __ALS_GAIN_2_5,
5: __ALS_GAIN_5,
10: __ALS_GAIN_10,
20: __ALS_GAIN_20,
40: __ALS_GAIN_40
}
ALS_GAIN_ACTUAL = { # Data sheet shows gain values as binary list
1: 1.01, # Nominal gain 1; actual gain 1.01
1.25: 1.28, # Nominal gain 1.25; actual gain 1.28
1.67: 1.72, # Nominal gain 1.67; actual gain 1.72
2.5: 2.60, # Nominal gain 2.5; actual gain 2.60
5: 5.21, # Nominal gain 5; actual gain 5.21
10: 10.32, # Nominal gain 10; actual gain 10.32
20: 20.00, # Nominal gain 20; actual gain 20
40: 40.00, # Nominal gain 40; actual gain 40
}
def __init__(self, i2cBus, address=0x29, debug=False):
# Depending on if you have an old or a new Raspberry Pi, you
# may need to change the I2C bus. Older Pis use SMBus 0,
# whereas new Pis use SMBus 1. If you see an error like:
# 'Error accessing 0x29: Check your I2C address '
# change the SMBus number in the initializer below!
# setup i2c bus and SFR address
self.i2c = i2cBus
self.address = address
self.debug = debug
# Module identification
self.idModel = 0x00
self.idModelRevMajor = 0x00
self.idModelRevMinor = 0x00
self.idModuleRevMajor = 0x00
self.idModuleRevMinor = 0x00
self.idDate = 0x00
self.idTime = 0x00
if self.get_register(self.__VL6180X_SYSTEM_FRESH_OUT_OF_RESET) == 1:
print("ToF sensor is ready.")
self.ready = True
else:
print("ToF sensor reset failure.")
self.ready = False
# Required by datasheet
# http://www.st.com/st-web-ui/static/active/en/resource/technical/document/application_note/DM00122600.pdf
self.set_register(0x0207, 0x01)
self.set_register(0x0208, 0x01)
self.set_register(0x0096, 0x00)
self.set_register(0x0097, 0xfd)
self.set_register(0x00e3, 0x00)
self.set_register(0x00e4, 0x04)
self.set_register(0x00e5, 0x02)
self.set_register(0x00e6, 0x01)
self.set_register(0x00e7, 0x03)
self.set_register(0x00f5, 0x02)
self.set_register(0x00d9, 0x05)
self.set_register(0x00db, 0xce)
self.set_register(0x00dc, 0x03)
self.set_register(0x00dd, 0xf8)
self.set_register(0x009f, 0x00)
self.set_register(0x00a3, 0x3c)
self.set_register(0x00b7, 0x00)
self.set_register(0x00bb, 0x3c)
self.set_register(0x00b2, 0x09)
self.set_register(0x00ca, 0x09)
self.set_register(0x0198, 0x01)
self.set_register(0x01b0, 0x17)
self.set_register(0x01ad, 0x00)
self.set_register(0x00ff, 0x05)
self.set_register(0x0100, 0x05)
self.set_register(0x0199, 0x05)
self.set_register(0x01a6, 0x1b)
self.set_register(0x01ac, 0x3e)
self.set_register(0x01a7, 0x1f)
self.set_register(0x0030, 0x00)
if self.debug:
print("Register settings:")
print("0x0207 - ", hex(self.get_register(0x0207)))
print("0x0208 - ", hex(self.get_register(0x0208)))
print("0x0096 - ", hex(self.get_register(0x0096)))
print("0x0097 - ", hex(self.get_register(0x0097)))
print("0x00e3 - ", hex(self.get_register(0x00e3)))
print("0x00e4 - ", hex(self.get_register(0x00e4)))
print("0x00e5 - ", hex(self.get_register(0x00e5)))
print("0x00e6 - ", hex(self.get_register(0x00e6)))
print("0x00e7 - ", hex(self.get_register(0x00e7)))
print("0x00f5 - ", hex(self.get_register(0x00f5)))
print("0x00d9 - ", hex(self.get_register(0x00d9)))
print("0x00db - ", hex(self.get_register(0x00db)))
print("0x00dc - ", hex(self.get_register(0x00dc)))
print("0x00dd - ", hex(self.get_register(0x00dd)))
print("0x009f - ", hex(self.get_register(0x009f)))
print("0x00a3 - ", hex(self.get_register(0x00a3)))
print("0x00b7 - ", hex(self.get_register(0x00b7)))
print("0x00bb - ", hex(self.get_register(0x00bb)))
print("0x00b2 - ", hex(self.get_register(0x00b2)))
print("0x00ca - ", hex(self.get_register(0x00ca)))
print("0x0198 - ", hex(self.get_register(0x0198)))
print("0x01b0 - ", hex(self.get_register(0x01b0)))
print("0x01ad - ", hex(self.get_register(0x01ad)))
print("0x00ff - ", hex(self.get_register(0x00ff)))
print("0x0100 - ", hex(self.get_register(0x0100)))
print("0x0199 - ", hex(self.get_register(0x0199)))
print("0x01a6 - ", hex(self.get_register(0x01a6)))
print("0x01ac - ", hex(self.get_register(0x01ac)))
print("0x01a7 - ", hex(self.get_register(0x01a7)))
print("0x0030 - ", hex(self.get_register(0x0030)))
def default_settings(self):
# Recommended settings from datasheet
# http://www.st.com/st-web-ui/static/active/en/resource/technical/document/application_note/DM00122600.pdf
# Set GPIO1 high when sample complete
self.set_register(self.__VL6180X_SYSTEM_MODE_GPIO1, 0x10)
# Set Avg sample period
self.set_register(self.__VL6180X_READOUT_AVERAGING_SAMPLE_PERIOD, 0x30)
# Set the ALS gain
self.set_register(self.__VL6180X_SYSALS_ANALOGUE_GAIN, 0x46)
# Set auto calibration period (Max = 255)/(OFF = 0)
self.set_register(self.__VL6180X_SYSRANGE_VHV_REPEAT_RATE, 0xFF)
# Set ALS integration time to 100ms
self.set_register(self.__VL6180X_SYSALS_INTEGRATION_PERIOD, 0x63)
# perform a single temperature calibration
self.set_register(self.__VL6180X_SYSRANGE_VHV_RECALIBRATE, 0x01)
# Optional settings from datasheet
# http://www.st.com/st-web-ui/static/active/en/resource/technical/document/application_note/DM00122600.pdf
# Set default ranging inter-measurement period to 100ms
self.set_register(self.__VL6180X_SYSRANGE_INTERMEASUREMENT_PERIOD, 0x09)
# Set default ALS inter-measurement period to 100ms
self.set_register(self.__VL6180X_SYSALS_INTERMEASUREMENT_PERIOD, 0x31)
# Configures interrupt on 'New Sample Ready threshold event'
self.set_register(self.__VL6180X_SYSTEM_INTERRUPT_CONFIG_GPIO, 0x24)
# Additional settings defaults from community
self.set_register(self.__VL6180X_SYSRANGE_MAX_CONVERGENCE_TIME, 0x32)
self.set_register(
self.__VL6180X_SYSRANGE_RANGE_CHECK_ENABLES, 0x10 | 0x01)
self.set_register_16bit(
self.__VL6180X_SYSRANGE_EARLY_CONVERGENCE_ESTIMATE, 0x7B)
self.set_register_16bit(self.__VL6180X_SYSALS_INTEGRATION_PERIOD, 0x64)
self.set_register(self.__VL6180X_SYSALS_ANALOGUE_GAIN, 0x40)
self.set_register(self.__VL6180X_FIRMWARE_RESULT_SCALER, 0x01)
if self.debug:
print("Default settings:")
print("SYSTEM_MODE_GPIO1 - ",
hex(self.get_register(self.__VL6180X_SYSTEM_MODE_GPIO1)))
print("READOUT_AVERAGING_SAMPLE_PERIOD - ",
hex(self.get_register(
self.__VL6180X_READOUT_AVERAGING_SAMPLE_PERIOD)))
print("SYSALS_ANALOGUE_GAIN - ",
hex(self.get_register(self.__VL6180X_SYSALS_ANALOGUE_GAIN)))
print("SYSRANGE_VHV_REPEAT_RATE - ",
hex(self.get_register(self.__VL6180X_SYSRANGE_VHV_REPEAT_RATE)))
print("SYSALS_INTEGRATION_PERIOD - ",
hex(self.get_register(self.__VL6180X_SYSALS_INTEGRATION_PERIOD)))
print("SYSRANGE_VHV_RECALIBRATE - ",
hex(self.get_register(self.__VL6180X_SYSRANGE_VHV_RECALIBRATE)))
print("SYSRANGE_INTERMEASUREMENT_PERIOD - ",
hex(self.get_register(
self.__VL6180X_SYSRANGE_INTERMEASUREMENT_PERIOD)))
print("SYSALS_INTERMEASUREMENT_PERIOD - ",
hex(self.get_register(
self.__VL6180X_SYSALS_INTERMEASUREMENT_PERIOD)))
print("SYSTEM_INTERRUPT_CONFIG_GPIO - ",
hex(self.get_register(
self.__VL6180X_SYSTEM_INTERRUPT_CONFIG_GPIO)))
print("SYSRANGE_MAX_CONVERGENCE_TIME - ",
hex(self.get_register(
self.__VL6180X_SYSRANGE_MAX_CONVERGENCE_TIME)))
print("SYSRANGE_RANGE_CHECK_ENABLES - ",
hex(self.get_register(self.__VL6180X_SYSRANGE_RANGE_CHECK_ENABLES)))
print("SYSRANGE_EARLY_CONVERGENCE_ESTIMATE - ",
hex(self.get_register_16bit(
self.__VL6180X_SYSRANGE_EARLY_CONVERGENCE_ESTIMATE)))
print("SYSALS_INTEGRATION_PERIOD - ",
hex(self.get_register_16bit(
self.__VL6180X_SYSALS_INTEGRATION_PERIOD)))
print("SYSALS_ANALOGUE_GAIN - ",
hex(self.get_register(self.__VL6180X_SYSALS_ANALOGUE_GAIN)))
print("FIRMWARE_RESULT_SCALER - ",
hex(self.get_register(self.__VL6180X_FIRMWARE_RESULT_SCALER)))
def get_identification(self):
self.idModel = self.get_register(
self.__VL6180X_IDENTIFICATION_MODEL_ID)
self.idModelRevMajor = self.get_register(
self.__VL6180X_IDENTIFICATION_MODEL_REV_MAJOR)
self.idModelRevMinor = self.get_register(
self.__VL6180X_IDENTIFICATION_MODEL_REV_MINOR)
self.idModuleRevMajor = self.get_register(
self.__VL6180X_IDENTIFICATION_MODULE_REV_MAJOR)
self.idModuleRevMinor = self.get_register(
self.__VL6180X_IDENTIFICATION_MODULE_REV_MINOR)
self.idDate = self.get_register_16bit(
self.__VL6180X_IDENTIFICATION_DATE)
self.idTime = self.get_register_16bit(
self.__VL6180X_IDENTIFICATION_TIME)
def change_address(self, old_address, new_address):
# NOTICE: IT APPEARS THAT CHANGING THE ADDRESS IS NOT STORED IN NON-
# VOLATILE MEMORY POWER CYCLING THE DEVICE REVERTS ADDRESS BACK TO 0X29
if old_address == new_address:
return old_address
if new_address > 127:
return old_address
self.set_register(self.__VL6180X_I2C_SLAVE_DEVICE_ADDRESS, new_address)
self.address = new_address
return self.get_register(self.__VL6180X_I2C_SLAVE_DEVICE_ADDRESS)
# Print statement updated to Python 3.X
def get_distance(self):
# Start Single shot mode
self.set_register(self.__VL6180X_SYSRANGE_START, 0x01)
time.sleep(0.010)
if self.debug:
print("Range status: ",
hex(self.get_register(self.__VL6180X_RESULT_RANGE_STATUS) & 0xF1))
distance = self.get_register(self.__VL6180X_RESULT_RANGE_VAL)
self.set_register(self.__VL6180X_SYSTEM_INTERRUPT_CLEAR, 0x07)
return distance
def get_ambient_light(self, als_gain):
# First load in Gain we are using, do it every time in case someone
# changes it on us.
# Note: Upper nibble should be set to 0x4 i.e. for ALS gain
# of 1.0 write 0x46
# Set the ALS gain, defaults to 20.
# If gain is in the dictionary (defined in init()) it returns the value
# of the constant otherwise it returns the value for gain 20.
# This saves a lot of if/elif/else code!
# Print statement updated to Python 3.X
if als_gain not in self.ALS_GAIN_ACTUAL:
print("Invalid gain setting: ", float(als_gain), ". Setting to 20.")
als_gain_actual = self.ALS_GAIN_ACTUAL.setdefault(als_gain, 20)
self.set_register(
self.__VL6180X_SYSALS_ANALOGUE_GAIN,
(0x40 | self.ALS_GAIN_REG.setdefault(als_gain, self.__ALS_GAIN_20)))
# Start ALS Measurement
self.set_register(self.__VL6180X_SYSALS_START, 0x01)
time.sleep(0.100) # give it time...
# Retrieve the Raw ALS value from the sensor
# Print statement updated to Python 3.X
if self.debug:
print("ALS status: ",
hex(self.get_register(self.__VL6180X_RESULT_ALS_STATUS)) & 0xF1)
als_raw = self.get_register_16bit(self.__VL6180X_RESULT_ALS_VAL)
self.set_register(self.__VL6180X_SYSTEM_INTERRUPT_CLEAR, 0x07)
# Get Integration Period for calculation, we do this every time in case
# someone changes it on us.
als_integration_period_raw = self.get_register_16bit(
self.__VL6180X_SYSALS_INTEGRATION_PERIOD)
als_integration_period = 100.0 / als_integration_period_raw
# Calculate actual LUX from application note
als_calculated = \
0.32 * (als_raw / als_gain_actual) * als_integration_period
return als_calculated
def get_register(self, register_address):
a1 = (register_address >> 8) & 0xFF
a0 = register_address & 0xFF
self.i2c.write_i2c_block_data(self.address, a1, [a0])
data = self.i2c.read_byte(self.address)
return data
def get_register_16bit(self, register_address):
a1 = (register_address >> 8) & 0xFF
a0 = register_address & 0xFF
self.i2c.write_i2c_block_data(self.address, a1, [a0])
data0 = self.i2c.read_byte(self.address)
data1 = self.i2c.read_byte(self.address)
return (data0 << 8) | (data1 & 0xFF)
def set_register(self, register_address, data):
a1 = (register_address >> 8) & 0xFF
a0 = register_address & 0xFF
self.i2c.write_i2c_block_data(self.address, a1, [a0, (data & 0xFF)])
def set_register_16bit(self, register_address, data):
a1 = (register_address >> 8) & 0xFF
a0 = register_address & 0xFF
d1 = (data >> 8) & 0xFF
d0 = data & 0xFF
self.i2c.write_i2c_block_data(self.address, a1, [a0, d1, d0])
三、 打开终端更改权限
sudo chmod -R 777 /dev/i2c-1四、 使用上位机配置TOF模块
1. ttl转串口模块连接TOF050F,连接方式如图:(确认已安装ch340驱动)
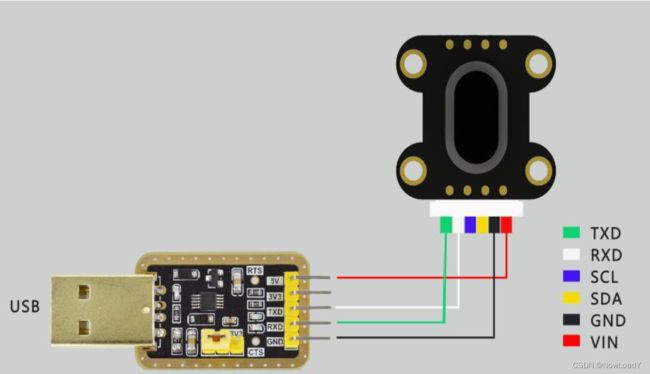 (图1)
(图1)
2. 打开上位机,将参数配置中的“禁止IIC”数值设为1;待刷新后退出。
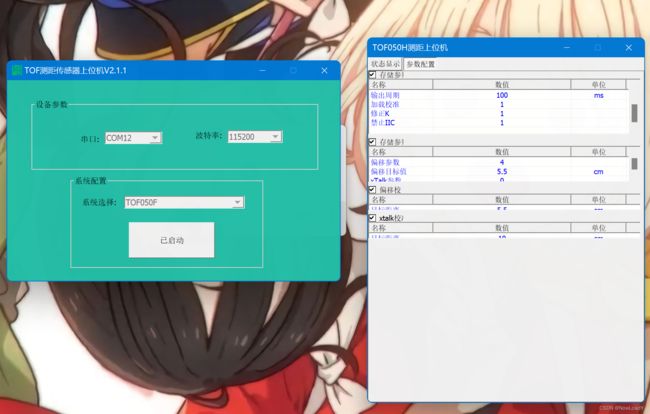 (图2)
(图2)
五、 连线,并运行test.py
1. 参考图1和图3(下图),
树莓派4B 3.3v -> VIN TOF050F
GND -> GND
SCL -> SCL
SDA -> SDA
 (图3)
(图3)
2. 运行代码,即看到一串距离数据不停地打印:
python test.py