《数字图像处理(第三版)》 第二章 数字图像基础 笔记2(图像感知和获取)
2.3 图像感知和获取
我们感兴趣的多数图像都是由 “照射” 源和形成图像的 “场景” 元素对光能的反射或吸收而产生的。“照射” 和 “场景” 描述了一个比我们熟悉的可见光源每天照射普通的三维场景更一般的情况。例如,照射可能由电磁能源引起,如雷达、红外线或X射线系统,也可以由非传统光源(如超声波)甚至由计算机产生的照射模式产生。同样,场景元素可能是熟悉的物体,也可能是分子、沉积岩或人类的大脑。
依赖光源的特性,照射被物体反射或投射。第一类例子是从平坦表面反射。第二类例子是为了产生一幅X射线照片,让X射线透过病人的身体。在某些应用中,反射能或透射能可聚焦到一个光转换器上(如荧光屏),光转换器再把能量转换为可见光。
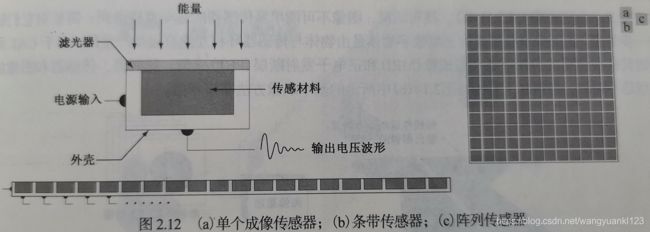
如上图显示了用于将照射能量变换为数字图像的三种主要的传感器配置。原理:通过组合输入电能和对特殊类型检测能源敏感的传感器材料,把输入能源转变为电压。输出电压波形是传感器的响应,通过把传感器相应数字化,从每个传感器得到一个数字量。
2.3.1 使用单个传感器获取图像
如上体(a)显示了单个传感器的部件,也许最熟悉的这类传感器是光二极管,其输入电压波形与入射光成正比。在传感器前面用一个滤光器可以改善选择性。
为使用单一传感器产生二维图像,在传感器和成像区域之间必须有x方向和y方向的相对位移。如下图所示。
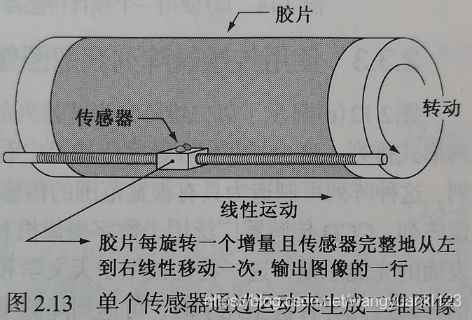
底片安装在一个鼓上,鼓的机械转动提供了一个维度的位移。单个传感器安装在引导螺杆上,它提供垂直于转动方向上的移动。这种方法是得到高分辨率图像的一种廉价方法(但速度较慢)。另一个类似的机械配置使用一个平面床,传感器则在两个方向线性移动。这些类型的机械数字化仪有时称为微密度计。
使用单个传感器成像的另一个例子是将一个激光源和传感器放在一起。
2.3.2 使用条带传感器获取图像
与单个传感器相比,更常用的几何结构是由内嵌式传感器组成的传感器带,这是大多数平板扫描仪中使用的排列方式。感知设备可能内嵌有4000个或更多的传感器。内嵌传感器常用于航空成像应用中。如下图,成像传感带一次给出一幅图像的一行,传感器带的运动则完成另一维度的二维图像。透镜和其他聚焦方法用于把扫描区域投影到传感器上。
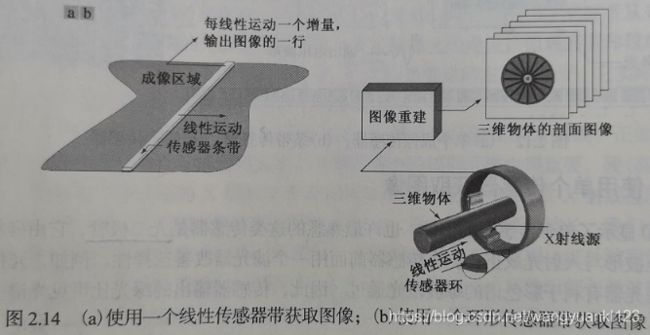
以圆环形方式安装的传感器带用于医学和工业成像,以得到三维物体的剖面(“切片”)图像。如上图(b)所示,旋转的X射线源提供照射,射线源对面的传感器则收集穿过物体的X射线能量。这就是医学和工业计算机轴向断层(CAT)成像的基础。注意,传感器的输出必须由重建算法处理,重建算法的目的是把感知数据转换为有意义的剖面图像。
2.3.3 使用传感器阵列获取图像
如图2.12©所示以二维阵列形式排列的一个传感器。大量的电磁波和一些超声波传感装置常以阵列形式排列。这也是在数字摄像机中的主要排列方式。这些摄像机的典型传感器是CCD阵列,CCD传感器广泛用于数字摄像机和其他光敏设备中。
每个传感器的响应正比于投射到传感器表面的光能总量,这一特性被用于天文学和其他要求低噪声图像的应用中。通过让传感器累计输入光信号超过几分钟甚至几小时,可达到降低噪声的目的。
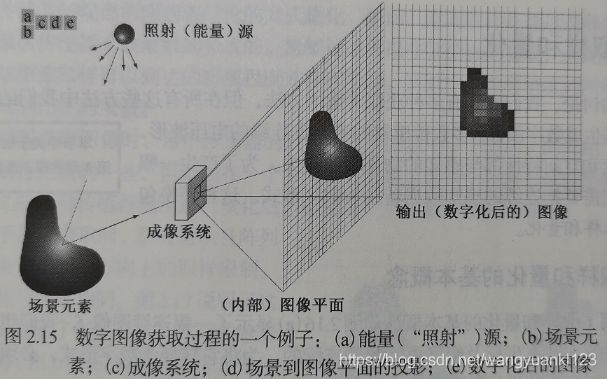
如图所示,该图显示了来自照射源的能量是场景元素的反射或者通过场景元素透射。图中©成像系统执行的第一个功能是收集入射能量,并将它聚焦到一个图像平面上。如果照射的是光,则成像系统的前端是一个光学透镜,该透镜把观察到的场景投影到透镜的聚焦平面上,如图(d)所示。与焦平面重合的传感器阵列产生与每个传感器接收到的光总量成正比的输出。数字或模拟电路扫描这些输出,并把它们转换成模拟信号,然后由成像系统的其他部分数字化,输出的是一幅数字图像,如图(e)所示。
2.3.4 简单的图像形成模型
在空间坐标(x, y)处,f的值或幅度是一个正的标量。当一幅图像由物理过程产生时,其亮度值正比于物理源(如电磁波)所辐射的能量。因此,f(x, y)一定是非零的和有限的。在处理过程中或是作为解译的结果,图像灰度可以为负值,在存储和显示图像时,我们通常会标定灰度,以便最小的负值变为0。
函数f(x, y)可由两个分量来表征:
- 入射到被观察场景的光源照射总量;
- 场景中物体所反射的光照总量。
这两个分量分别称为入射分量和反射分量,且分别表示为i(x, y)和r(x, y)。两个函数的乘积就是f(x, y), 即
f(x, y) = i(x, y) · r(x, y)
0 < i(x, y) < \infty
0 < r(x, y) < 1
式中反射分量 r(x, y) 限制在0(全吸收)和1(全反射)之间。i(x, y)的性质取决于照射源,而r(x, y)得性质取决于成像物体的特性。
令单色图像在任何坐标(x0, y0)处的强度(灰度)表示为
l = f(x_0, y_0)
从而可知 l 的取值范围为:
L_{min} \leq l \leq L_{max}
理论上,仅要求 Lmin 为正,而要求 Lmax 为有限值。实际上,
L_{min} = i_{min}r_{min}
L_{max} = i_{max}r_{max}
区间 [Lmin , Lmax] 称为灰度级(或强度级)。实际情况下常令该区间为 [0, L-1],其中 l=0 为黑色,l=L-1在灰度级中为白色。