分割算法DeepLabV3+论文理解及代码分析
前言
之前讲了DeepLabV1,V2,V3三个算法,DeepLab系列语义分割还剩下最后一个DeepLabV3+,以后有没有++,+++现在还不清楚,我们先来解读一下这篇论文并分析一下源码吧。论文地址:https://arxiv.org/pdf/1802.02611.pdf
背景
语义分割主要面临两个问题,第一是物体的多尺度问题,第二是DCNN的多次下采样会造成特征图分辨率变小,导致预测精度降低,边界信息丢失。DeepLab V3设计的ASPP模块较好的解决了第一个问题,而这里要介绍的DeepLabv3+则主要是为了解决第2个问题的。
我们知道从DeepLabV1系列引入空洞卷积开始,我们就一直在解决第2个问题呀,为什么现在还有问题呢?
我们考虑一下前面的代码解析推文的DeepLab系列网络的代码实现,地址如下:https://mp.weixin.qq.com/s/0dS0Isj2oCo_CF7p4riSCA 。对于DeepLabV3,如果Backbone为ResNet101,Stride=16将造成后面9层的特征图变大,后面9层的计算量变为原来的4倍大。而如果采用Stride=8,则后面78层的计算量都会变得很大。这就造成了DeepLabV3如果应用在大分辨率图像时非常耗时。所以为了改善这个缺点,DeepLabV3+来了。
算法原理
DeepLabV3+主要有两个创新点。
编解码器
为了解决上面提到的DeepLabV3在分辨率图像的耗时过多的问题,DeepLabV3+在DeepLabV3的基础上加入了编码器。具体操作见论文中的下图:

其中,(a)代表SPP结构,其中的8x是直接双线性插值操作,不用参与训练。(b)是编解码器,融集合了高层和低层信息。©是DeepLabv3+采取的结构。
我们来看一下DeepLabV3+的完整网络结构来更好的理解这点:

对于编码器部分,实际上就是DeepLabV3网络。首先选一个低层级的feature用1 * 1的卷积进行通道压缩(原本为256通道,或者512通道),目的是减少低层级的比重。论文认为编码器得到的feature具有更丰富的信息,所以编码器的feature应该有更高的比重。 这样做有利于训练。
对于解码器部分,直接将编码器的输出上采样4倍,使其分辨率和低层级的feature一致。举个例子,如果采用resnet conv2 输出的feature,则这里要 ×4上采样。将两种feature连接后,再进行一次 3 × 3的卷积(细化作用),然后再次上采样就得到了像素级的预测。
实验结果表明,这种结构在Stride=16时有很高的精度速度又很快。stride=8相对来说只获得了一点点精度的提升,但增加了很多的计算量。
更改主干网络
论文受到近期MSRA组在Xception上改进工作可变形卷积(Deformable-ConvNets)启发,Deformable-ConvNets对Xception做了改进,能够进一步提升模型学习能力,新的结构如下:

最终,论文使用了如下的改进:
更深的Xception结构,不同的地方在于不修改entry flow network的结构,为了快速计算和有效的使用内存
所有的max pooling结构被stride=2的深度可分离卷积代替
每个3x3的depthwise convolution都跟BN和Relu
最后将改进后的Xception作为encodet主干网络,替换原本DeepLabv3的ResNet101。
实验
论文使用modified aligned Xception改进后的ResNet-101,在ImageNet-1K上做预训练,通过扩张卷积做密集的特征提取。采用DeepLabv3的训练方式(poly学习策略,crop 513 × 513 )。注意在decoder模块同样包含BN层。
使用1*1卷积少来自低级feature的通道数
上面提到过,为了评估在低级特征使用1*1卷积降维到固定维度的性能,做了如下对比实验:
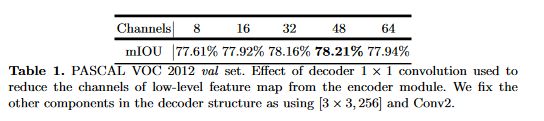
实验中取了 Conv2尺度为 [ 3 × 3 , 256 ]的输出,降维后的通道数在32和48之间最佳,最终选择了48。
使用3*3卷积逐步获取分割结果
编解码特征图融合后经过了 3 × 3 卷积,论文探索了这个卷积的不同结构对结果的影响:

最终,选择了使用两组 3 × 3 卷积。这个表格的最后一项代表实验了如果使用 Conv2和 Conv3同时预测,Conv2上采样2倍后与Conv3结合,再上采样2倍的结果对比,这并没有提升显著的提升性能,考虑到计算资源的限制,论文最终采样简单的decoder方案,即我们看到的DeepLabV+的网络结构图。
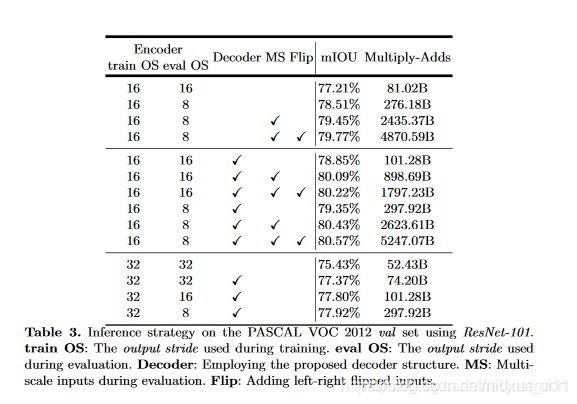
Backbone为ResNet101
Backbone为Xception

这里可以看到使用深度卷积分离层可以显著降低计算的消耗。
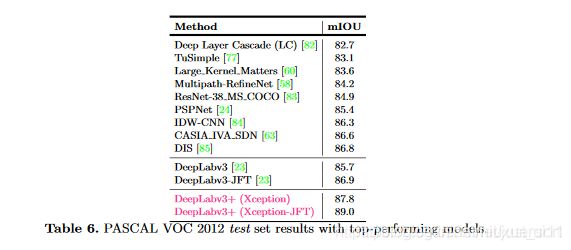
与其他先进模型在VOC2012的测试集上的对比。
在目标边界上的提升,使用trimap实验模型在分割边界上的准确度,计算边界周围扩展频带内的mIou,结果如下:

与双线性上采样相比,decoder有明显的提上,trimap越小效果与明显, Fig5 右图可视化了结果。
结论
论文提出的DeepLabv3+是encoder-decoder架构,其中encoder架构采用Deeplabv3,decoder采用一个简单却有效的模块用于恢复目标边界细节。并可使用空洞卷积在指定计算资源下控制feature的分辨率。论文探索了Xception和深度分离卷积在模型上的使用,进一步提高模型的速度和性能。模型在VOC2012上获得了SOAT。Google出品,必出精品,这网络真的牛。
代码实现
结合以下网络结构看如下代码就很容易了。
from __future__ import absolute_import, print_function
from collections import OrderedDict
import torch
import torch.nn as nn
import torch.nn.functional as F
from .deeplabv3 import _ASPP
from .resnet import _ConvBnReLU, _ResLayer, _Stem
class DeepLabV3Plus(nn.Module):
"""
DeepLab v3+: Dilated ResNet with multi-grid + improved ASPP + decoder
"""
def __init__(self, n_classes, n_blocks, atrous_rates, multi_grids, output_stride):
super(DeepLabV3Plus, self).__init__()
# Stride and dilation
if output_stride == 8:
s = [1, 2, 1, 1]
d = [1, 1, 2, 4]
elif output_stride == 16:
s = [1, 2, 2, 1]
d = [1, 1, 1, 2]
# Encoder
ch = [64 * 2 ** p for p in range(6)]
self.layer1 = _Stem(ch[0])
self.layer2 = _ResLayer(n_blocks[0], ch[0], ch[2], s[0], d[0])
self.layer3 = _ResLayer(n_blocks[1], ch[2], ch[3], s[1], d[1])
self.layer4 = _ResLayer(n_blocks[2], ch[3], ch[4], s[2], d[2])
self.layer5 = _ResLayer(n_blocks[3], ch[4], ch[5], s[3], d[3], multi_grids)
self.aspp = _ASPP(ch[5], 256, atrous_rates)
concat_ch = 256 * (len(atrous_rates) + 2)
self.add_module("fc1", _ConvBnReLU(concat_ch, 256, 1, 1, 0, 1))
# Decoder
self.reduce = _ConvBnReLU(256, 48, 1, 1, 0, 1)
self.fc2 = nn.Sequential(
OrderedDict(
[
("conv1", _ConvBnReLU(304, 256, 3, 1, 1, 1)),
("conv2", _ConvBnReLU(256, 256, 3, 1, 1, 1)),
("conv3", nn.Conv2d(256, n_classes, kernel_size=1)),
]
)
)
def forward(self, x):
h = self.layer1(x)
h = self.layer2(h)
h_ = self.reduce(h)
h = self.layer3(h)
h = self.layer4(h)
h = self.layer5(h)
h = self.aspp(h)
h = self.fc1(h)
h = F.interpolate(h, size=h_.shape[2:], mode="bilinear", align_corners=False)
h = torch.cat((h, h_), dim=1)
h = self.fc2(h)
h = F.interpolate(h, size=x.shape[2:], mode="bilinear", align_corners=False)
return h
if __name__ == "__main__":
model = DeepLabV3Plus(
n_classes=21,
n_blocks=[3, 4, 23, 3],
atrous_rates=[6, 12, 18],
multi_grids=[1, 2, 4],
output_stride=16,
)
model.eval()
image = torch.randn(1, 3, 513, 513)
print(model)
print("input:", image.shape)
print("output:", model(image).shape)